

PuppyC
SKU:K035


Description
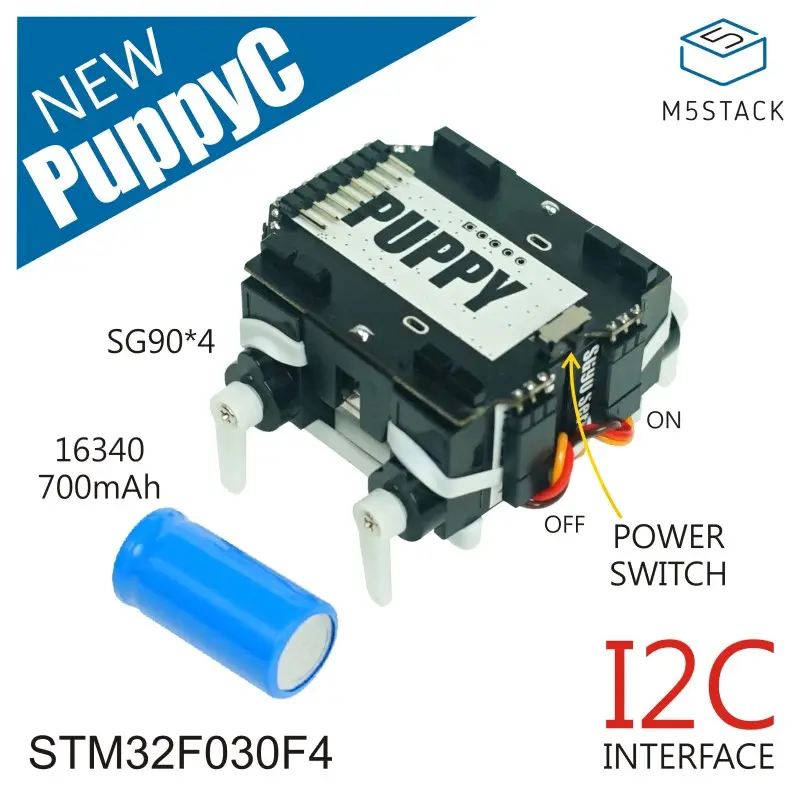
PuppyC is a programmable quadruped robot base compatible with M5StickC. It consists of a control chip STM32F030F4, four SG90 servos, a battery holder, and an independent switch, among other components. Its movement is relatively smooth and easy to control. Due to its small contact area and slow movement, it is recommended to use it on surfaces that are soft and have high friction. This base needs to be used in conjunction with the M5StickC controller. After programming the M5StickC, it communicates with PuppyC via the I2C protocol (0x38) to control the servo movements.
Features
- Programmable robot
- Servo drive controller
- Quadruped walking
- Servo angle: 0-180°
Includes
- 1 x PuppyC
- 1 x 16340 Battery (700mAh)
- 4 x SG90 Servos
Applications
- Servo drive
- Robot control
- Smart toys
Specifications
| Specification | Parameter |
|---|---|
| MCU | STM32F030F4P6 |
| Communication Protocol | I2C:0x38 |
| Net Weight | 58g |
| Gross Weight | 108g |
| Product Size | 52 x 60 x 35mm |
| Package Size | 106 x 66 x 42mm |
Softwares
Arduino
UiFlow1
Easyloader
| Easyloader | Download Link | Note |
|---|---|---|
| PuppyC Easyloader | download | / |