























BaseX
SKU:K037


説明
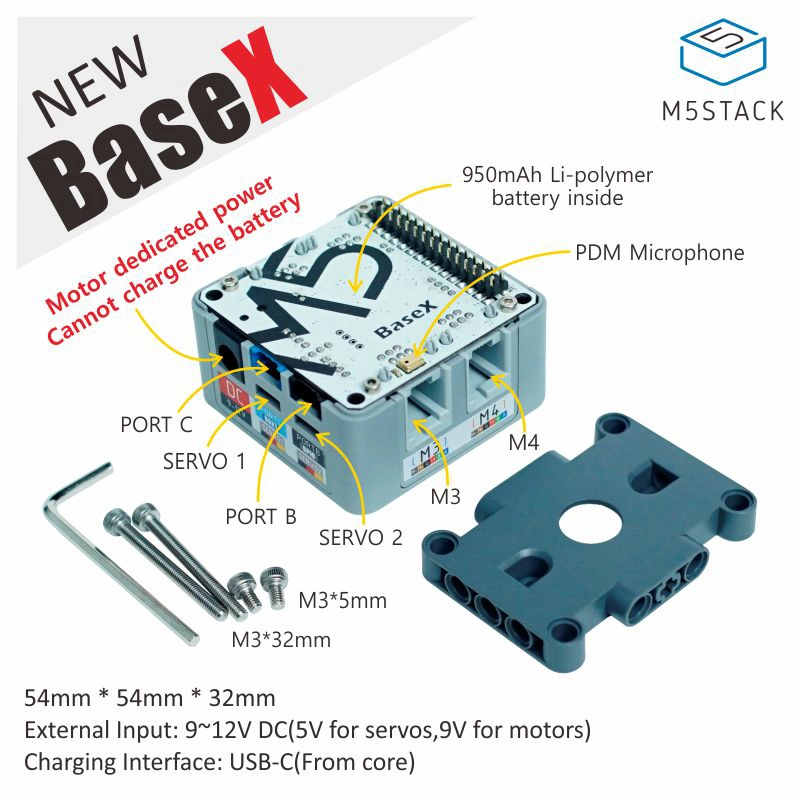
BaseXはLEGO EV3モーターに対応した専用ベースです。構造設計はbase26と同様で、複数の固定方法をサポートし、さらにLEGO接続用ベースが用意されています。LEGOの構造物を作る際に、Basexを簡単に埋め込むことができます。Basexは同時に4ウェイ(RJ11)のLEGOモーターに接続することができ、角度/速度の読み取りと制御をサポートし、オリジナルのモーター機能と完全に互換性があります。また、ベースには2つのサーボインターフェースがあり、サーボの回転角度を直接制御することができます。さまざまな利用シーンに対応するため、UARTインターフェース(16 / 17)、GPIOインターフェース(26 / 36)を搭載し、各種センサーへのアクセスをより柔軟に行えるようにしました。950mAhのバッテリーをベースに内蔵し、m5coreのusb-cインターフェースを通じて充電することで、耐久性を向上させることができます。インターフェースの駆動能力を向上させるため、ベースにはDC電源ソケットが搭載されており、9-12Vの外部電源から給電することで、モーターに安定した電力を供給することができます。
製品の特徴
- 4ウェイRJ11レゴモーターインターフェイス (合計最大出力電流2A)
- 2ウェイサーボインターフェース (合計最大出力電流2A)
- 1ウェイ UART
- 1ウェイGPIO
- PDMマイク搭載 (GOIO 34)
- DC-DC変換(9〜12V、モーターのみ独立電源)内蔵
- 950mAhバッテリー内蔵
- 複数の固定方法/LEGOホール接続に対応
アプリケーション
- エンコーダモータ / サーボコントローラ
- LEGO DIY インテリジェント制御
含まれるもの
- 1x BaseX
- 1x LEGO ベース
- 2x M3 * 5mm 六角穴付きネジ
- 2x M3 * 32mm 六角穴付きネジ
- 1x 六角レンチ
仕様
| リソース | パラメータ |
|---|---|
| 製品重量 | 59g |
| 梱包重量 | 110g |
| 製品サイズ | 54*54*26mm |
| 梱包サイズ | 150*65*40mm |



EasyLoader
- EasyLoaderはシンプルで高速なプログラムバーナーです。EasyLoaderの各製品ページには、製品に関連したケースプログラムが用意されています。これを簡単な手順でM5デバイスに書き込み、一連の機能検証を行うことができます。
- ソフトウェアをダウンロードした後、ダブルクリックしてアプリケーションを実行し、M5デバイスをデータケーブルでコンピュータに接続し、ポートパラメータを選択し、**"Burn "をクリックしてプログラムを書き込みます(M5StickCの場合、ボーレートを115200または750000に設定します**)。
- Easyloader for M5Coreをインストールし使用する前に、CP210Xドライバをインストールする必要があります(M5StickCをコントローラとする場合はインストールする必要はありません)。
I2C制御命令
I2C スレーブアドレス 0x22
| 機能 | レジスタアドレス | 値 |
|---|---|---|
| SERVO1_ANGLE_ADDR | 0X00 | 0~180 |
| SERVO2_ANGLE_ADDR | 0x01 | 0~180 |
| SERVO1_PULSE_ADDR | 0x10 | (uint16_t) 500~2500 |
| SERVO2_PULSE_ADDR | 0x12 | (uint16_t)500~2500 |
| MOTOR1_PWM_DUTY_ADDR | 0x20 | -127~127 |
| MOTOR2_PWM_DUTY_ADDR | 0x21 | -127~127 |
| MOTOR3_PWM_DUTY_ADDR | 0x22 | -127~127 |
| MOTOR4_PWM_DUTY_ADDR | 0x23 | -127~127 |
| MOTOR1_ENCODER_ADDR | 0x30 | int32_t |
| MOTOR2_ENCODER_ADDR | 0x34 | int32_t |
| MOTOR3_ENCODER_ADDR | 0x38 | int32_t |
| MOTOR4_ENCODER_ADDR | 0x3C | int32_t |
| MOTOR1_SPEED_ADDR | 0x40 | -127~127 |
| MOTOR2_SPEED_ADDR | 0x41 | -127~127 |
| MOTOR3_SPEED_ADDR | 0x42 | -127~127 |
| MOTOR4_SPEED_ADDR | 0x43 | -127~127 |
I2Cのモーターアドレス
| モータ番号 | モータアドレス |
|---|---|
| MOTOR1 | 0x50 |
| MOTOR2 | 0x60 |
| MOTOR3 | 0x70 |
| MOTOR4 | 0x80 |
モード設定方法。モータアドレス+nByte
| Byte | Value |
|---|---|
| 0 | Run mode |
| 1 | position-p(3) |
| 2 | position-i(1) |
| 3 | position-d(15) |
| 4 | 5 |
| 8 | position-max-speed |
| 9 | speed-p |
| 10 | speed-i |
| 11 | speed-d |
| 12 | speed-point |
Example
Arduino IDE
UIFlow

How to use Module basex on the UIFlow 1.0 graphical programming platform and related API instructions.