























C Back Driver
SKU:A100



説明
C Back Driverは、M5StickCに対応したステアリングギア駆動基板です。STM32F030F4P6 制御方式を採用し、M5StickC との通信には I2C 通信インターフェースを使用し、4 組の PWM ステアリングギア駆動インターフェース(ステアリングギアの駆動電力は M5StickC に直接接続されています)を提供し ます。SG90など)。StickCの上部にあるI2Cバスをリードし、STM32拡張によるGPIOインタフェースを追加提供するモジュールです。一般的なロジックレベルやADCのアナログ信号入力の読み出しに使用できます。背面のLEGO互換ホールデザインにより、ユーザーはこのドライバボードをLEGOビルディングブロック構造に簡単に組み込むことができ、ステアリングギアマニピュレータなどの制御可能な構造物を構築するのに使用することができます。
製品の特長
- 4x サーボドライバ
- C/C Plusに対応
- インターフェース拡張 (GPIO、I2C)
含まれるもの
- 1x C Back Driver
- 2x 六角ネジ M2*5
- 1x 六角レンチ
アプリケーション
- サーボコントローラ
- ロボット制御
仕様
| 仕様 | パラメータ |
|---|---|
| 通信プロトコル | I2C: 0x38 |
| 駆動電流 | 15mA |
| 製品重量 | 9g |
| 梱包重量 | 13.5g |
| 製品サイズ | 23.7*49.2*21mm |
| パッケージサイズ | 136*92*22mm |


ピンマッピング
| M5StickC | GPIO0 | GPIO26 | 3.3V | GND |
|---|---|---|---|---|
| C Back Driver | SDA | SCL | 3.3V | GND |
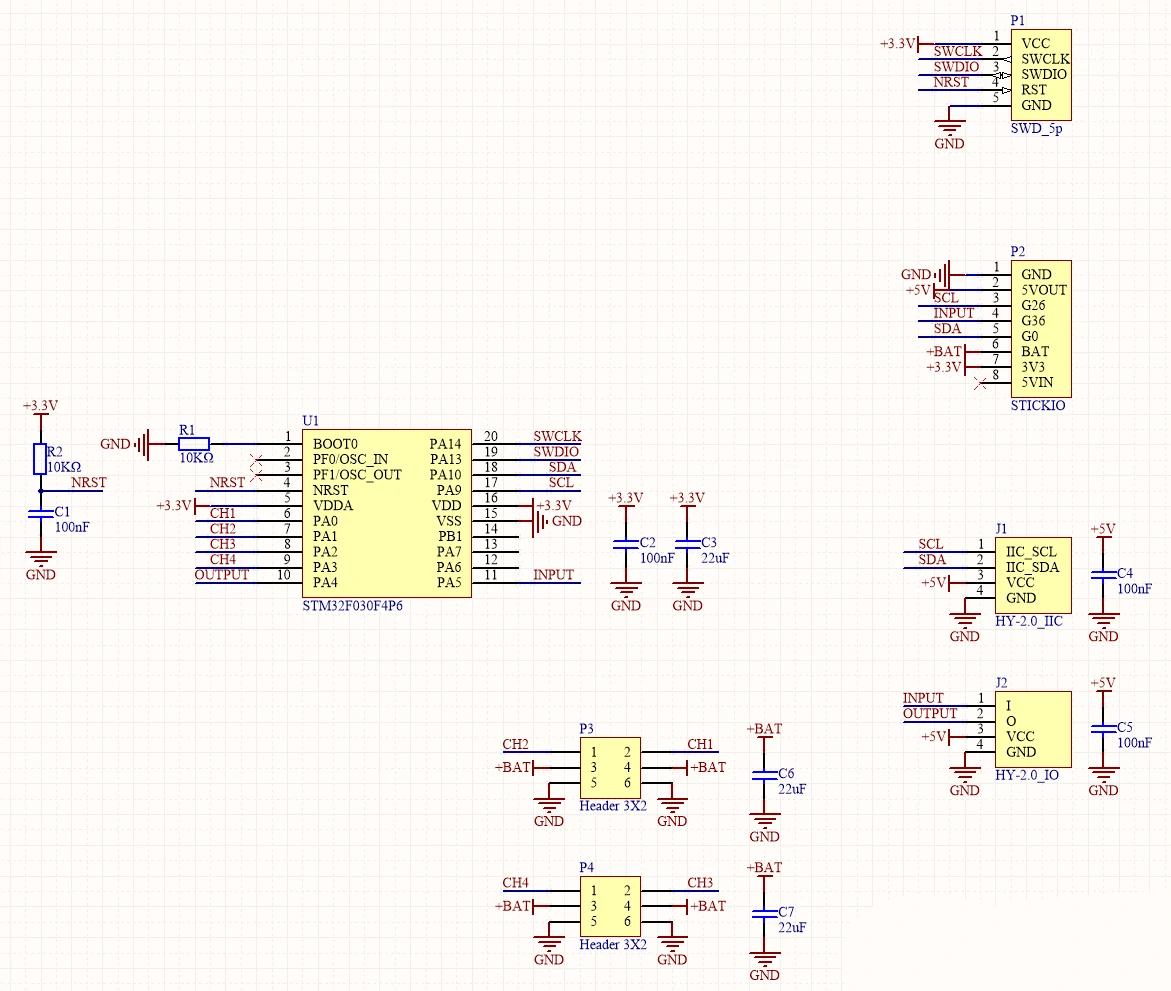
回路図
プロトコル
- プロトコル種別 I2C
- I2C アドレス 0x38
/*------------------------------------------------ -------------------------------------------------- */
| SERVO_ANGLE_REG | 0x00-0x03
| ------------------------------------------------- -----------------------------------------------
| servo_1_reg[0] 0x00 | R/W | SERVO1 Angle value(0~180)
| servo_2_reg[1] 0x01 | R/W | SERVO2 Angle value(0~180)
| servo_3_reg[2] 0x02 | R/W | SERVO3 Angle value(0~180)
| servo_4_reg[3] 0x03 | R/W | SERVO4 Angle value(0~180)
/*------------------------------------------------ -------------------------------------------------- -
/*------------------------------------------------ -------------------------------------------------- */
| SERVO_PULSE_REG | 0x10-0x17
| ------------------------------------------------- -----------------------------------------------
| servo_1_reg[0:1] 0x10-0x11 | R/W | SERVO1 PULSE value(500~2500)
| servo_2_reg[2:3] 0x12-0x13 | R/W | SERVO2 PULSE value(500~2500)
| servo_3_reg[4:5] 0x14-0x15 | R/W | SERVO3 PULSE value(500~2500)
| servo_4_reg[6:7] 0x16-0x17 | R/W | SERVO4 PULSE value(500~2500)
/*------------------------------------------------ -------------------------------------------------- -
/*------------------------------------------------ -------------------------------------------------- */
| PPORTB_ADC_REG | 0x20-0x21
| ------------------------------------------------- -----------------------------------------------
| portb_adc_reg[0:1] 0x20-0x21 | R | PPORTB ADC value(0~4095)
/*------------------------------------------------ -------------------------------------------------- -
/*------------------------------------------------ -------------------------------------------------- */
| PPORTB_OUTPUT_REG | 0x30
| ------------------------------------------------- -----------------------------------------------
| portb_output_reg[0] 0x30 | R | PPORTB Output Digital value(0/1)
/*------------------------------------------------ -------------------------------------------------- -
/*------------------------------------------------ -------------------------------------------------- */
| PPORTB_INPUT_REG | 0x31
| ------------------------------------------------- -----------------------------------------------
| portb_input_reg[0] 0x31 | R | PPORTB Input Digital value(0/1)
/*------------------------------------------------ -------------------------------------------------- -
Example
Arduino
C BACK DRIVER を使用して、4ch サーボ制御と ADC 読み出しを実現するケースです。ご使用の機器に合わせて、下記のケースプログラムを選択してください。
UIFlow example
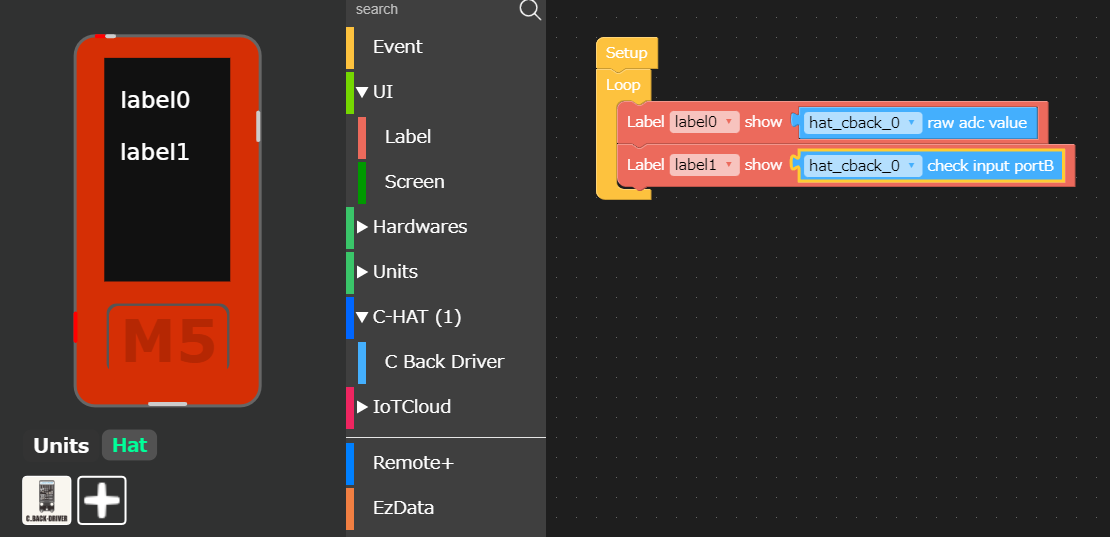
この例では、C BACK DRIVER の Port.B に Light Unit を接続し、光量(adc)とデジタル入力値を取得します。
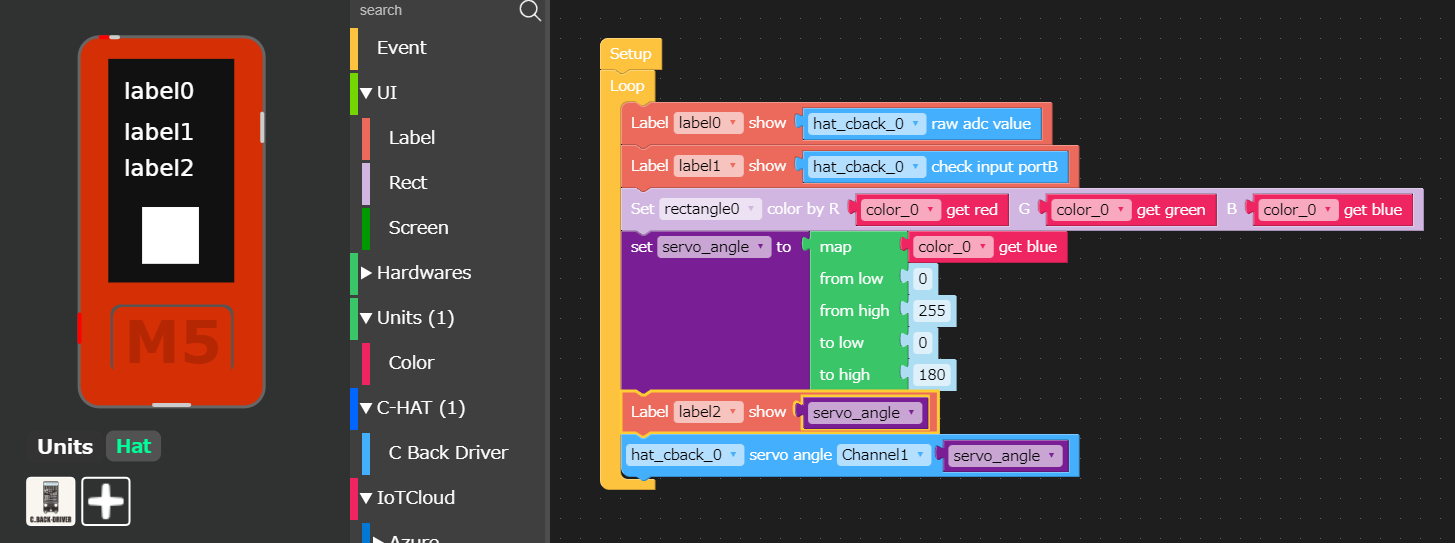
この例では、Port.BにLight Unit、Port.AにColorSensorUnitを接続し、青の値でサーボを制御しています。

UIFlow
Write:
- サーボ角の設定(チャンネル、角度)

- サーボパルスを設定する(Channel, pulse)

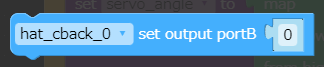
- Port.Bのデジタル出力を設定(値)
Read:
- Adcの生データを読み込む

- ポートBのデジタル入力値を読み込む

ビデオ
C BACK DRIVERを使って四輪車を作る