PuppyC
SKU:K035


説明
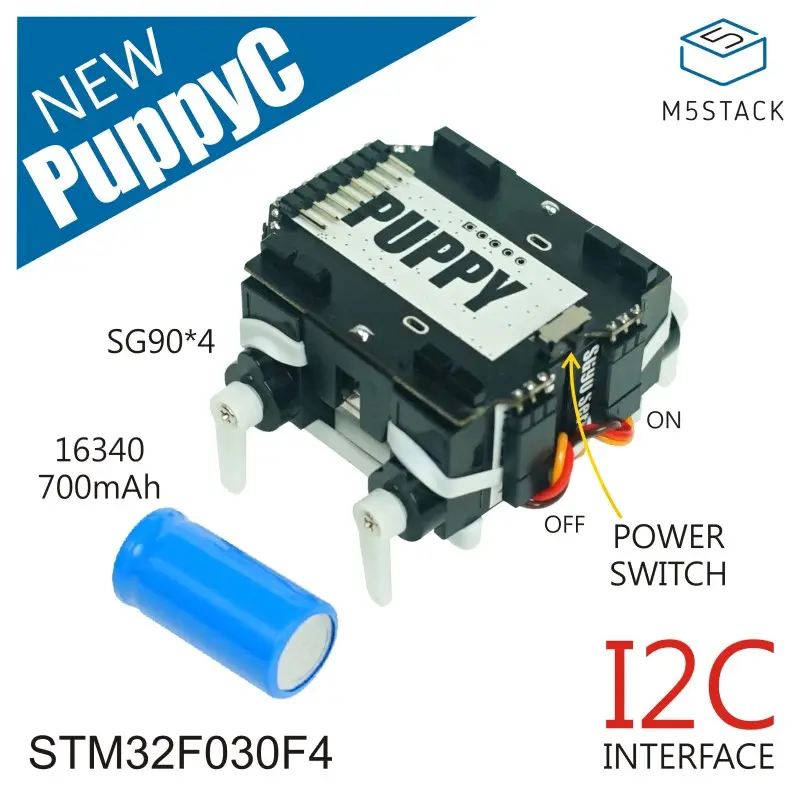
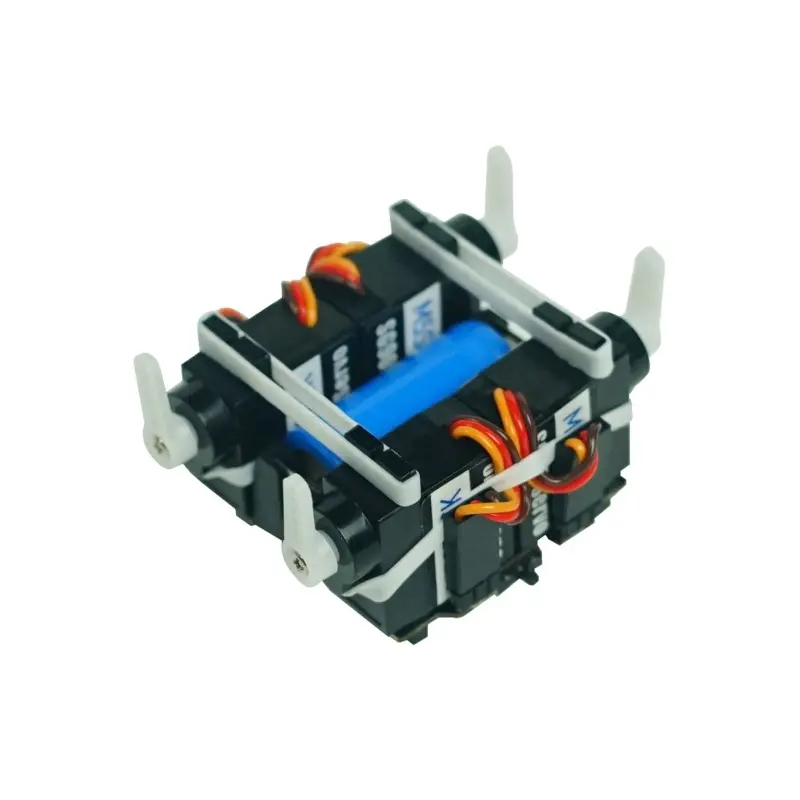
PuppyCは、M5StickCと互換性のあるプログラマブルな4足歩行ロボットベースです。STM32F030F4マイクロコントローラ、SG90マイクロサーボ4個、バッテリーホルダー、独立したスイッチが搭載されています。
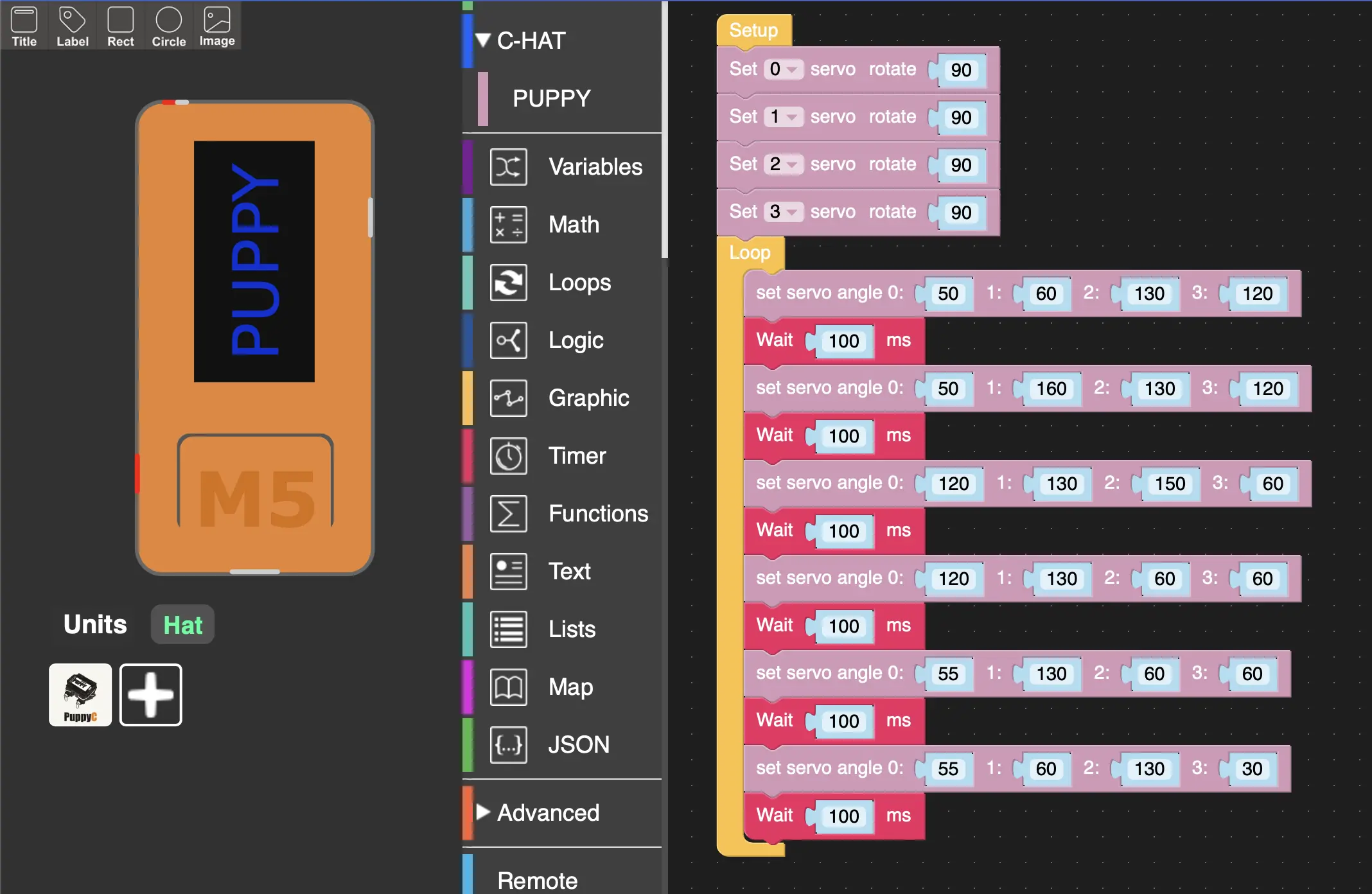
StickCはプログラミング後、I2Cプロトコル(0x38)でPuppyCと通信し、ステアリングの動きを制御します。
接触面積が小さいため動きが遅く、柔らかい表面でも摩擦力ができるだけ大きくなるように制御します。
この製品は現在EOLです。
製品の特徴
- プログラマブルロボット
- サーボコントローラ
- 4足歩行
- サーボ角度範囲:0~180
アプリケーション
- ペットロボット
- リモコンロボット
- スマートトイ、コグニティブトイ
含まれるもの
- 1x PuppyC base
- 1x 16340 Battery(700mAh)
- 4x SG90 Servo
仕様
| リソース | パラメータ |
|---|---|
| 通信プロトコル | I2C:0x38 |
| 製品重量 | 58g |
| 梱包重量 | 108g |
| 製品サイズ | 52*60*35mm |
| 梱包サイズ | 106*66*42mm |
EasyLoader
1.EasyLoaderはシンプルで高速なプログラムバーナーです。EasyLoaderの各製品ページには、製品に関連したケースプログラムが用意されています。これを簡単な手順でM5デバイスに焼き付け、一連の機能検証を行うことができます。
2.ソフトウェアをダウンロードした後、ダブルクリックしてアプリケーションを実行し、データケーブルを通してM5デバイスをコンピュータに接続し、ポートパラメータを選択し、**"Burn "をクリックしてプログラムを書き込む(M5StickCの場合、ボーレートを115200または750000に設定する**)。
Example
Arduino
UIFlow