RoverC-Pro
SKU:K036-B


解説
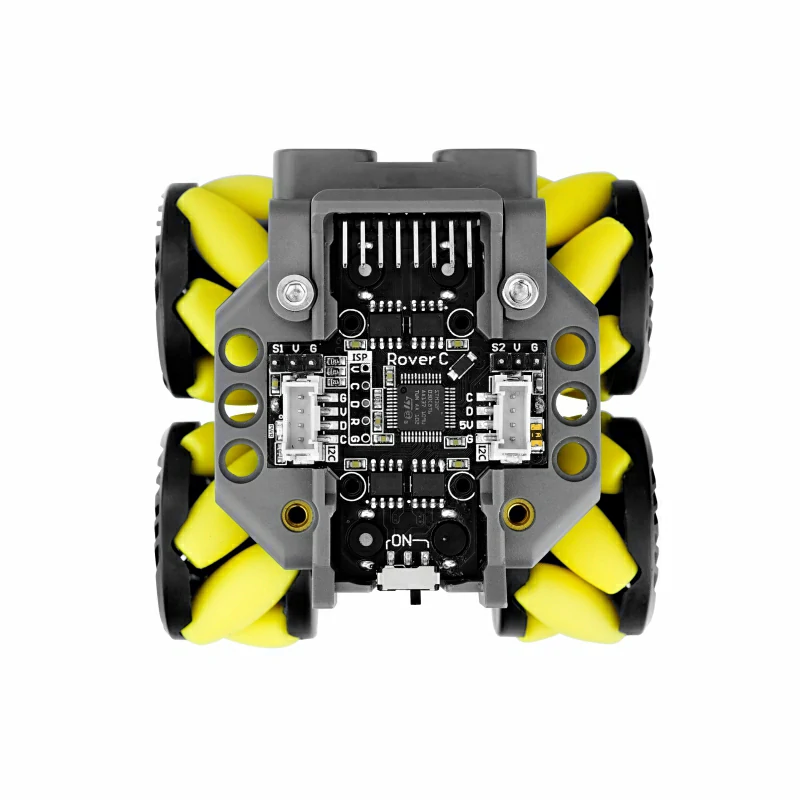
RoverC-Proはプログラマブルなメカナムホイール搭載の全方位移動ロボットベースです。M5StickC/M5StickC PLUSに対応しており、M5StickC/M5StickC PLUSを挿入するだけで初期化することができます。メイン制御チップはSTM32F030C6T6で、N20ウォームギアモータを4個内蔵し、モータドライバで車輪を直接駆動します。
PRO版では、サーボで制御されるグリップ機構を搭載し、対象物を把持することができます。ベースにはサーボ制御専用のドライバが2つ用意されています。また、Grove互換のI2Cコネクタを2つ用意し、他のモジュールの拡張を容易にします。ベースはレゴと互換性があり、構造的に拡張することが可能です。背面には16340(700mAh)のバッテリーがあり、ここからバッテリーを交換することができます。M5StickC/M5StickC PLUSから充電することができます。ベースの電源は、独立したスイッチで制御します。
製品特徴
- I2Cアドレス 0x38
- リモートコントロール
- グリップ機構
- プログラマブル
- 4チャンネルモータドライバ
- LEGO互換
- 拡張用グローブポート
- 16340(700mAh)バッテリーホルダー搭載
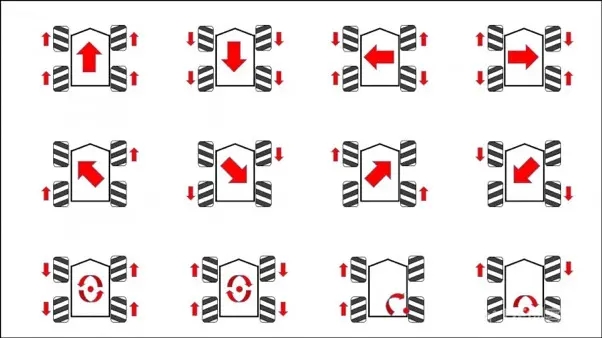
- 全方向への柔軟な動作が可能
含まれるもの
- 1x RoverCベース(16340(700mAh)バッテリーを含む)
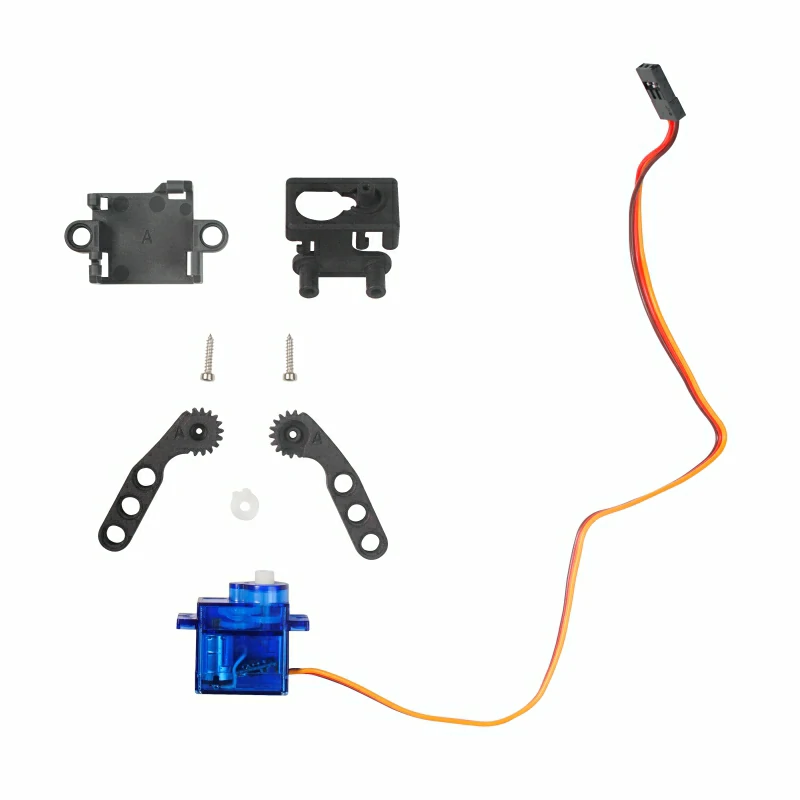
- 1x Claw Kit
アプリケーション
- 自律走行型ローバー
- ミニRC監視車
- スマートトイ、コグニティブトイ
仕様
| 仕様 | パラメータ |
|---|---|
| 通信プロトコル | I2C:0x38 |
| 製品重量 | 187g |
| 梱包重量 | 245g |
| 製品サイズ | 120 x 75 x 58mm |
| 梱包サイズ | 115 x 85 x 65mm |





RoverC PROとRoverCの比較
| / | RoverC PRO | RoverC |
|---|---|---|
| Servo Gripper | x1 | / |
| Servo Ext Port | x2 | / |
| Battery | Removable | Non-removable |
EasyLoader (イージーローダー)
EasyLoaderは、製品に関連するケースプログラムを内蔵した、簡潔で高速なプログラムライターです。簡単な手順で主制御に焼き付け、一連の機能検証を行うことができます。
Windows版Easyloaderのダウンロード MacOS版Easyloaderをダウンロード
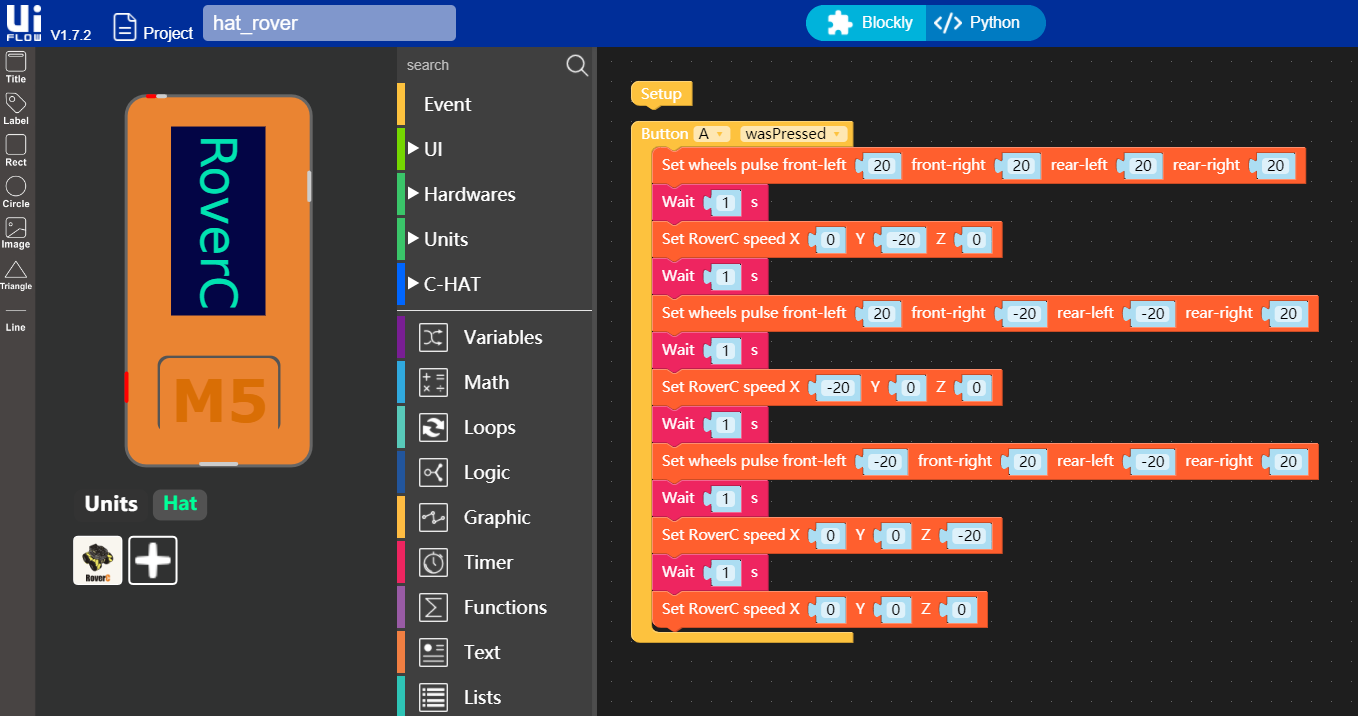
ButtonAを押すとオブジェクトが固定され、前後に動かすとクランプが解除されます。
ピンマップ
| M5StickC | GPIO26 | GPIO0 | 5V | GND |
|---|---|---|---|---|
| RoverC HAT | SCL | SDA | 5V | GND |
| I2C① | SCL | SDA | 5V | GND |
| I2C② | SCL | SDA | 5V | GND |
Example
Arduino
1: RoverCとJoyCを使い、UDP通信による無線制御を実現するケースです。使用する機器に合わせて、下記のケースプログラムを選択してください。
注意:RoverCが完全に充電されていることを確認してからご使用ください。充電方法:M5StickCをRoverCに挿入し、USBケーブルを接続して充電してください。JoyCとRoverCのEasyLoaderファームウェアを2つのM5StickCにそれぞれ書き込み、書き込み後にJoyCとRoverCをそれぞれ挿入すると、RoverCは起動後に「M5AP+2バイトmacアドレス」のホットスポット名を表示し、同時にJoyCはRoverCのMacアドレス名をスキャンするので、JoyC上のM5StickCのホームボタンを3秒間押し続けると車のホットスポットへのスキャンを開始、ペアに成功することができます。ペアリングに成功すると、画面左上にリンクアイコンがハイライトされ、画面上にジョイスティックの値が表示されます。左のジョイスティックで前後上下、左右でパン、右のジョイスティックで左右のステアリングを制御します。
2:このケースはRoverCのスタンドアロン制御プログラムで、メインコントローラから直接制御します。ご使用の機器に合わせて、下記の対応するケースプログラムをお選びください。
プロトコル
プロトコル種別 I2C
I2C アドレス:0x38
I2C协议
UIFlow