























GRBL 13.2
SKU:M035

説明
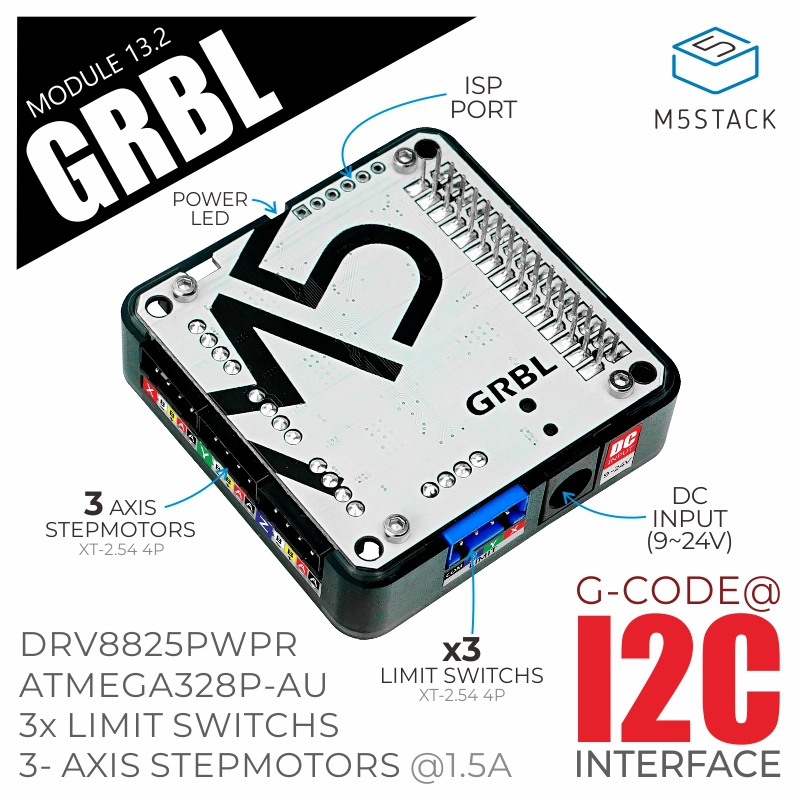
GRBL 13.2は、M5Stackスタッキングモジュールシリーズの3軸ステッピングモータドライバモジュールです。ATmega328P-AUコントローラとDRV8825PWPRステッピングモーターチップ制御方法を3セット使用し、同時に3つのバイポーラステッパーを駆動することができます。
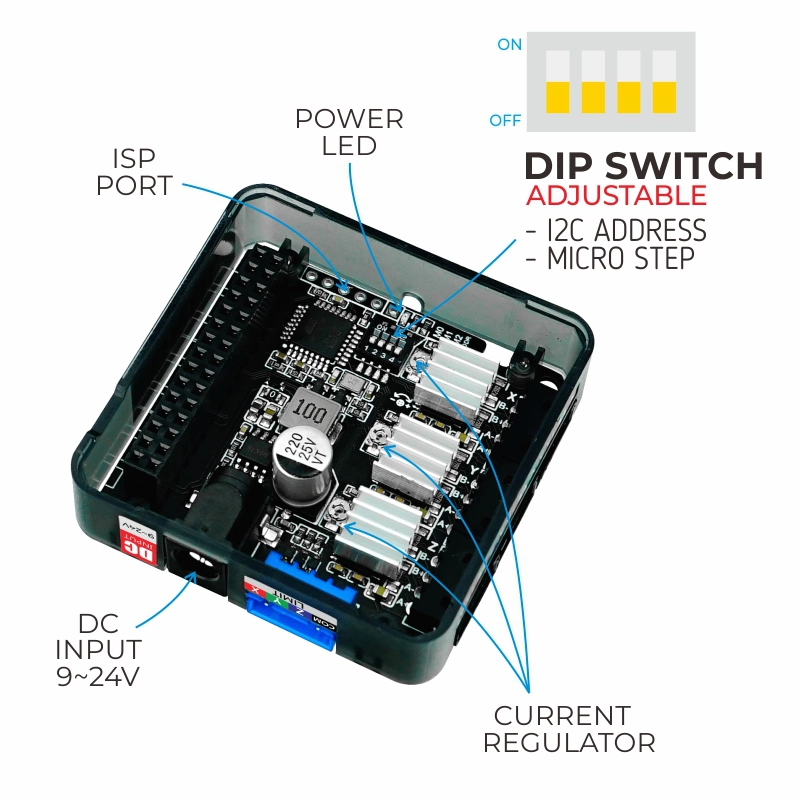
I2C通信インタフェース(デフォルトアドレス: 0x70)と、モータステップ細分化(1/32ステップ細分化の最大サポート)とI2Cアドレス調整(サポートデュアルアドレス調整0x70、0x71)用の統合DIPスイッチを使用して、あなたは2 GRBL 13.2 モジュールスタックで6軸制御を実現することができます。
電源入力インタフェースはDC/9-24Vで、モータ駆動電流は1.5Aに達することができ、3組のリミットスイッチ信号インタフェースが開放されており、外部リミットスイッチ(アクティブロー)を接続してモータブレーキ機能を実現することが可能です。プリンターやロボットアームなど、さまざまなステッピングモーターの動作制御シーンに適しています。
製品の特徴
- ATmega328P-AUコントローラ
- 3軸DRV8825PWPRステッピング・モーター・ドライバー
- 最大1.5Aまでの駆動電流
- バイポーラステッピングモータを駆動
- 最大1/32モードSTEP細分化
- リミットスイッチ・インターフェース (アクティブ・ロー)
含まれるもの
- 1x GRBL 13.2 モジュール
アプリケーション
- プリンター
- スキャナ
- オフィスオートメーション
- ファクトリーオートメーション
- ロボット技術
仕様
| リソース | パラメータ |
|---|---|
| モータドライバチップ | DRV8825PWPR |
| コントローラチップ | ATmega328PMS-AU |
| Single Channelの最大駆動電流 | 1.5A |
| サポート最大ステップ細分化 | 1/32 |
| インターフェース | XT2.54 |
| 製品重量 | 22.5g |
| 梱包重量 | 42.3g |
| 製品サイズ | 54.2*54.2*13.2mm |
| 梱包サイズ | 95 * 65 * 25mm |






EasyLoader
EasyLoaderは簡潔で高速なプログラムライターで、製品に関連するケースプログラムを内蔵しています。簡単な手順で主制御に焼き付け、一連の機能検証を行うことができます。デバイスの種類に応じて、対応するドライバをインストールしてください。M5Coreホスト CP210Xドライバインストールチュートリアルはこちら をご覧ください。
Windows版Easyloaderのダウンロード MacOS版Easyloaderをダウンロード
Description:
ボタンを押して3軸のステッピングモーターを回転させ、ロックが発生したらボタンCを押してロックを解除します。
ボタンを押して3軸のステッピングモーターを回転させ、ロックが発生したらボタンCを押してロックを解除します。
関連リンク
ピンマップ
| M5Core(GROVE A) | GPIO21 | GPIO22 | 5V | GND |
|---|---|---|---|---|
| GRBL 13.2 | SDA | SCL | VCC | GND |
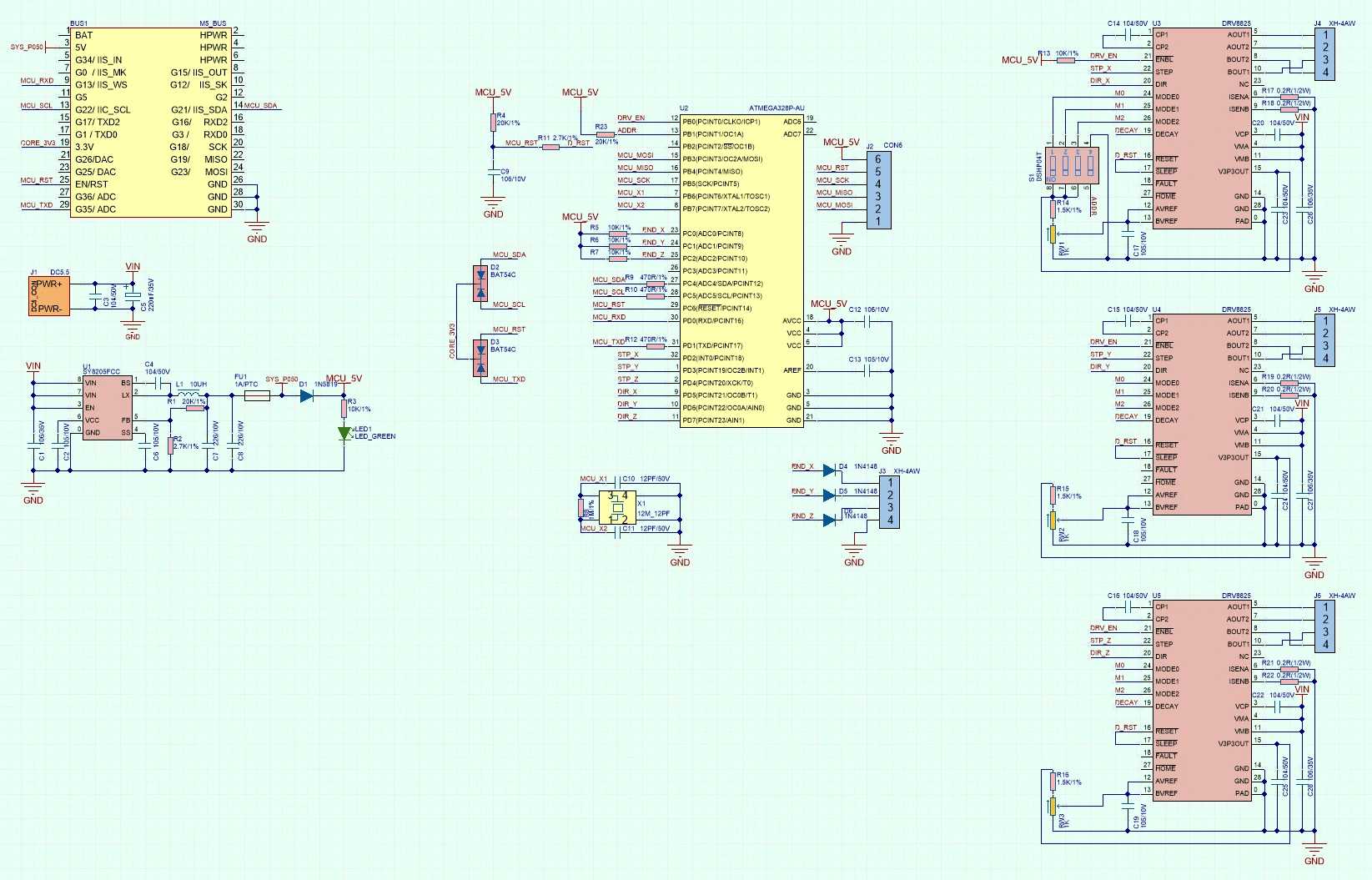
回路図
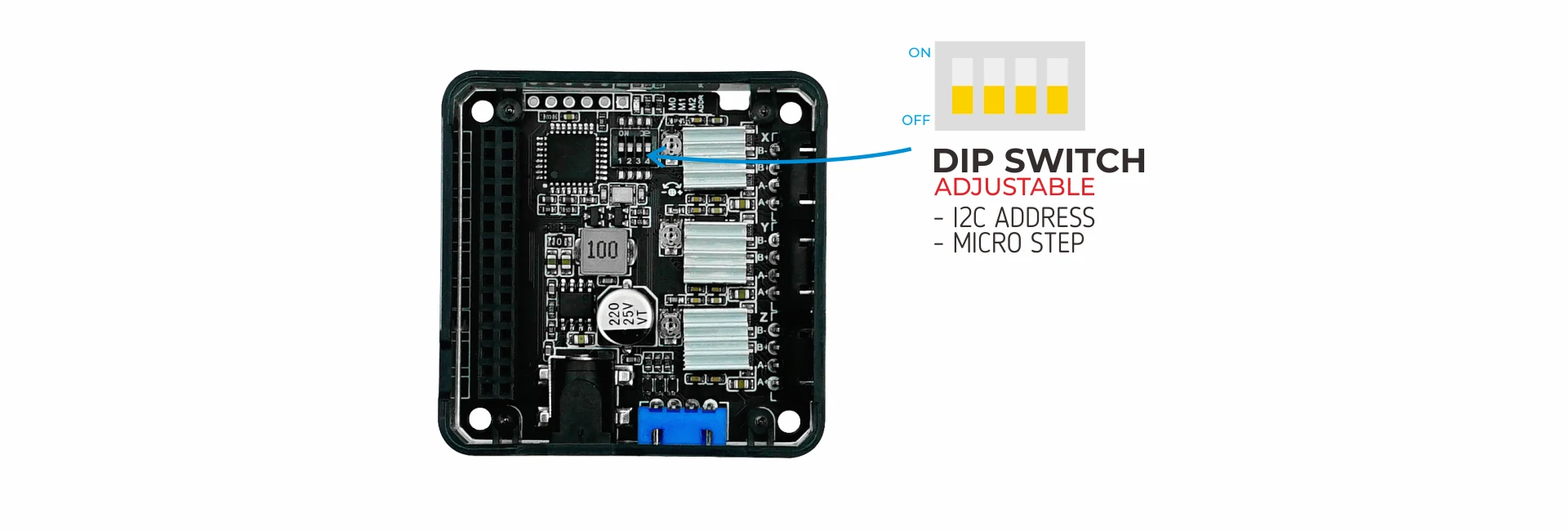
ステップ細分化調整
| MODE2 | MODE1 | MODE0 | STEP MODE |
|---|---|---|---|
| 0 | 0 | 0 | Full step (2-phase excitation) with 71% current |
| 0 | 0 | 1 | 1/2 step (1-2 phase excitation) |
| 0 | 1 | 0 | 1/4 step (W1-2 phase excitation) |
| 0 | 1 | 1 | 1/8 step |
| 1 | 0 | 0 | 1/16 step |
| 1 | 0 | 1 | 1/32 step |
| 1 | 1 | 0 | 1/32 step |
| 1 | 1 | 1 | 1/32 step |
I2Cアドレス調整
| Switch | Address |
|---|---|
| 0 | 0x70 |
| 1 | 0x71 |
UIFlow

How to use Module grbl on the UIFlow 1.0 graphical programming platform and related API instructions.
Example
GrblControl.h-API
//Initialize
void Init();
//Initialize, and set the three-axis step length and acceleration.
void Init(uint32_t x_step, uint32_t y_step,uint32_t z_step,uint32_t acc);
//Gcode
void Gcode(char *c);
//Control x, y, z offset and motor speed
void SetMotor(int x=0, int y=0, int z=0, int speed=300);
$0=755.906 (x, step/mm)
$1=755.906 (y, step/mm)
$2=755.906 (z, step/mm)
$3=30 (step pulse, usec)
$4=500.000 (default feed, mm/min)
$5=500.000 (default seek, mm/min)
$6=28 (step port invert mask, int:00011100)
$7=25 (step idle delay, msec)
$8=50.000 (acceleration, mm/sec^2)
$9=0.050 (junction deviation, mm)
$10=0.100 (arc, mm/segment)
$11=25 (n-arc correction, int)
$12=3 (n-decimals, int)
$13=0 (report inches, bool)
$14=1 (auto start, bool)
$15=0 (invert step enable, bool)
$16=0 (hard limits, bool)
$17=0 (homing cycle, bool)
$18=0 (homing dir invert mask, int:00000000)
$19=25.000 (homing feed, mm/min)
$20=250.000 (homing seek, mm/min)
$21=100 (homing debounce, msec)
$22=1.000 (homing pull-off, mm)
パラメータを設定するには'$x=value'、現在の設定をダンプするには'$'だけが必要です。