
















Bala
SKU:K014





描述
Bala 是一款平衡车应用。该产品是由 M5 FIRE 与 双路直流电机底座组合而成的一款自平衡机器人,其 "BALA" 名称的由来出自 "Balance" 一词的缩写。默认预装平衡车应用程序,在运行时使用闭环算法保持垂直平衡。使用加速度计与陀螺仪姿态数据来校正其方向和位置.
产品特性
- 2 路直流驱动器模块
- I2C 通信:0x56
- 兼容 LEGO
- POGO Pin
- 支持 microSD 拓展
包装内容
- 1 x Bala
- 1 x 电机驱动
- 2 x N20 电机 (内置编码器)
- 1 x Type-C USB
规格参数
| 规格 | 参数 |
|---|---|
| ESP32 | 240MHz 双核,600 DMIPS,520KB SRAM,Wi-Fi |
| Flash | 16MB Flash + 4MB PSRAM |
| 输入 | 5V @ 500mA |
| 接口 | Type-C x 1, GROVE (I2C+I/O+UART), Pogo Pin x 1 |
| LCD | 2 英寸,320x240 彩色 TFT LCD, ILI9341 |
| 扬声器 | 1W-0928 |
| 麦克风 | MEMS 模拟 BSE3729 麦克风 |
| LED | SK6812 3535 RGB LED x 10 |
| MEMS | BMM150+(MPU6886/SH200Q) |
| 电池 | 内置 550mAh @ 3.7V |
| 工作温度 | 32°F 至 104°F ( 0°C 至 40°C ) |
| 主控尺寸 | 54 x 54 x 21 mm |
| C.A.S.E | 塑料 ( PC ) |
| 产品重量 | 130g |
| 毛重 | 247g |
| 产品尺寸 | 90 x 54 x 61mm |
| 包装尺寸 | 185 x 108 x 81mm |
操作说明
BMM150 磁场干扰
带有磁铁的产品可能对 BMM150 磁场传感器造成干扰,导致读数异常。当搭配含有磁铁的 M5 主控设备时,需拆除磁铁,同时避免 BMM150 传感器放置在强磁场附近。
传感器进行校准
注意:首次使用务必先进行校准!按住最右侧 C 键开机,听到 "滴" 声后松开按键,传感器会进入校准设置,保持主机水平静止放置,3 秒后传感器校准完成,校准完成后会自动进入平衡模式。如果在使用过程中发现 BALA 无法保持平衡,可通过尝试校准传感器进行解决。
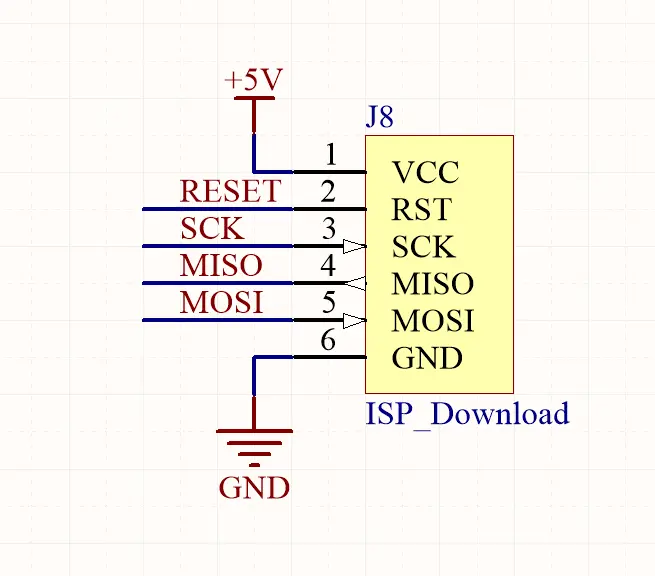
管脚映射
Mega328 ISP下载接口 Pin 脚定义
软件开发
Arduino
EasyLoader
| Easyloader | 下载链接 | 备注 |
|---|---|---|
| Bala Test Firmware MPU6050 Version Easyloader | download | / |
| Bala Test Firmware MPU6886 Version Easyloader | download | / |
相关视频
BALA 的演示
BALA 的演示 - 手机控制
BALA 的演示 - 巡线
BALA 的演示 - 使用手机巡线