Module 4EncoderMotor
SKU:M138
描述
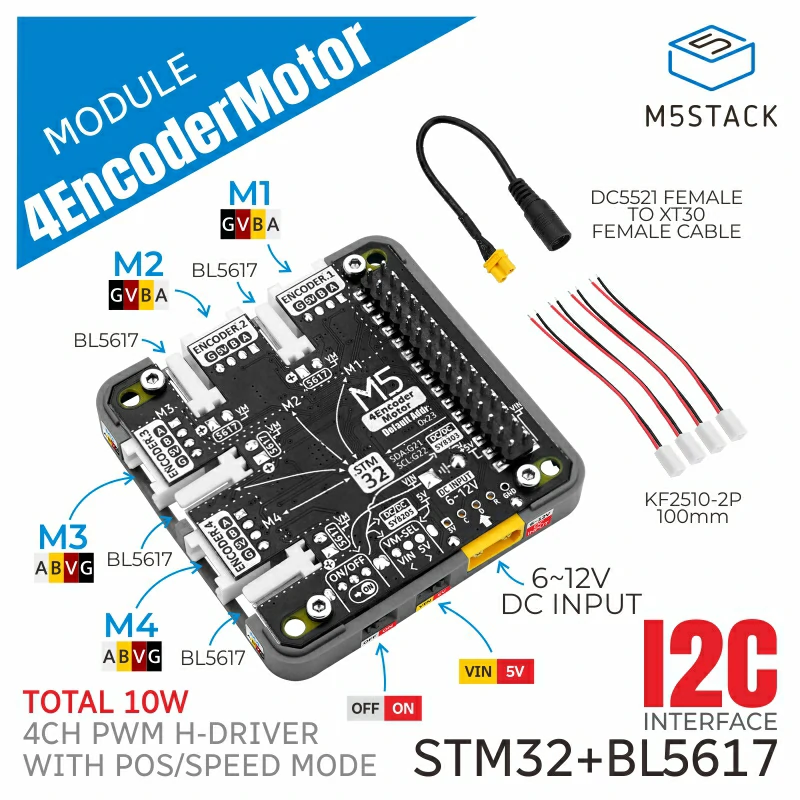
Module 4EncoderMotor 是一款 4 通道编码电机驱动模块,采用 STM32 + BL5617 H 桥驱动 IC 方案。以 I2C 通信方式,支持从机地址修改,提供灵活的控制方式。通过 AB 脉冲编码信号输入,实现精准的电机运动状态和位置检测。支持占空比控制、绝对位置定位和速度调节等模式,实现电机的正转、反转、停止和制动等多种功能。集成 INA199 电源监控,实时监测电压和电流状态。板载电源输入开关,可选择 DC 5V 或外部 DC 6 ~ 12V 电源输入。适用于机器人运动控制、自动化设备、智能车辆、实验室设备和工业自动化系统等领域。
产品特性
- 4 通道编码电机驱动
- AB 脉冲信号输入
- 占空比,绝对位置定位,速度调节控制模式
- I2C 通讯方式
- 电源电流电压监控
包装内容
- 1 x Module 4EncoderMotor
- 1 x DC5521 Female To XT30 Female 线缆
- 4 x KF2510-2P 100mm
应用场景
- 机器人运动控制
- 自动化设备
- 智能车辆
- 工业自动化系统
规格参数
| 规格 | 参数 |
|---|
| MCU | STM32F030C8T6 |
| 编码电机驱动 IC | BL5617 |
| 支持最大电流 | 3.0A |
| 功率 | 最大 10W |
| 外接 DC 电源 | 6 ~ 12V |
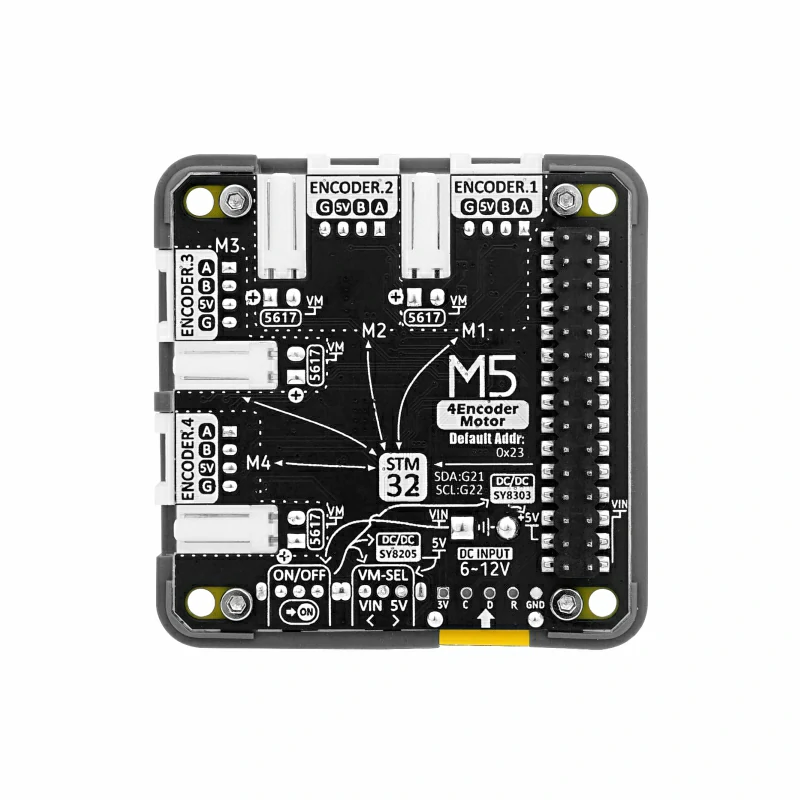
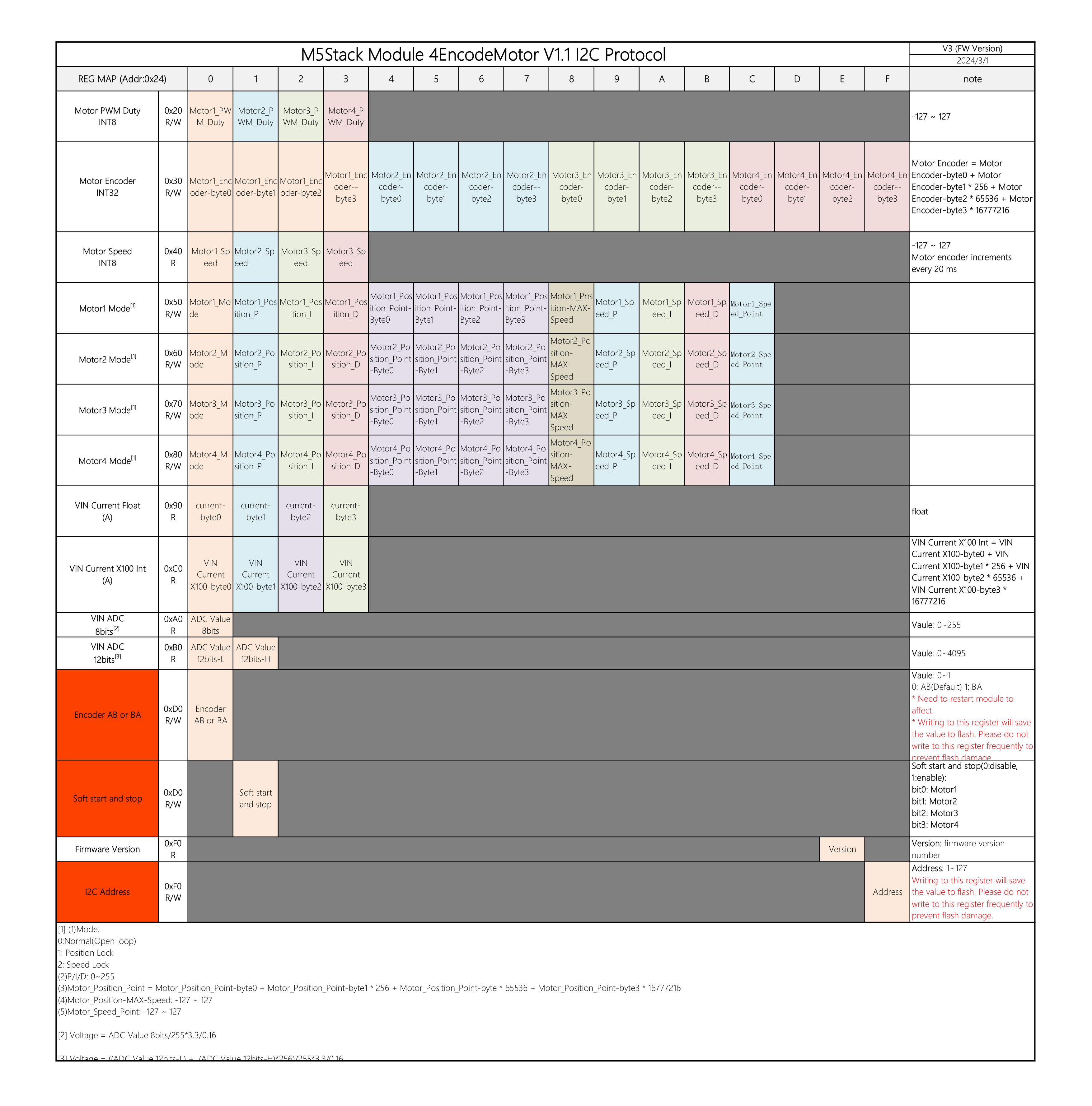
| 通信接口 | I2C 通信 @ 0x24 |
| 工作温度 | 0°C ~ 40°C |
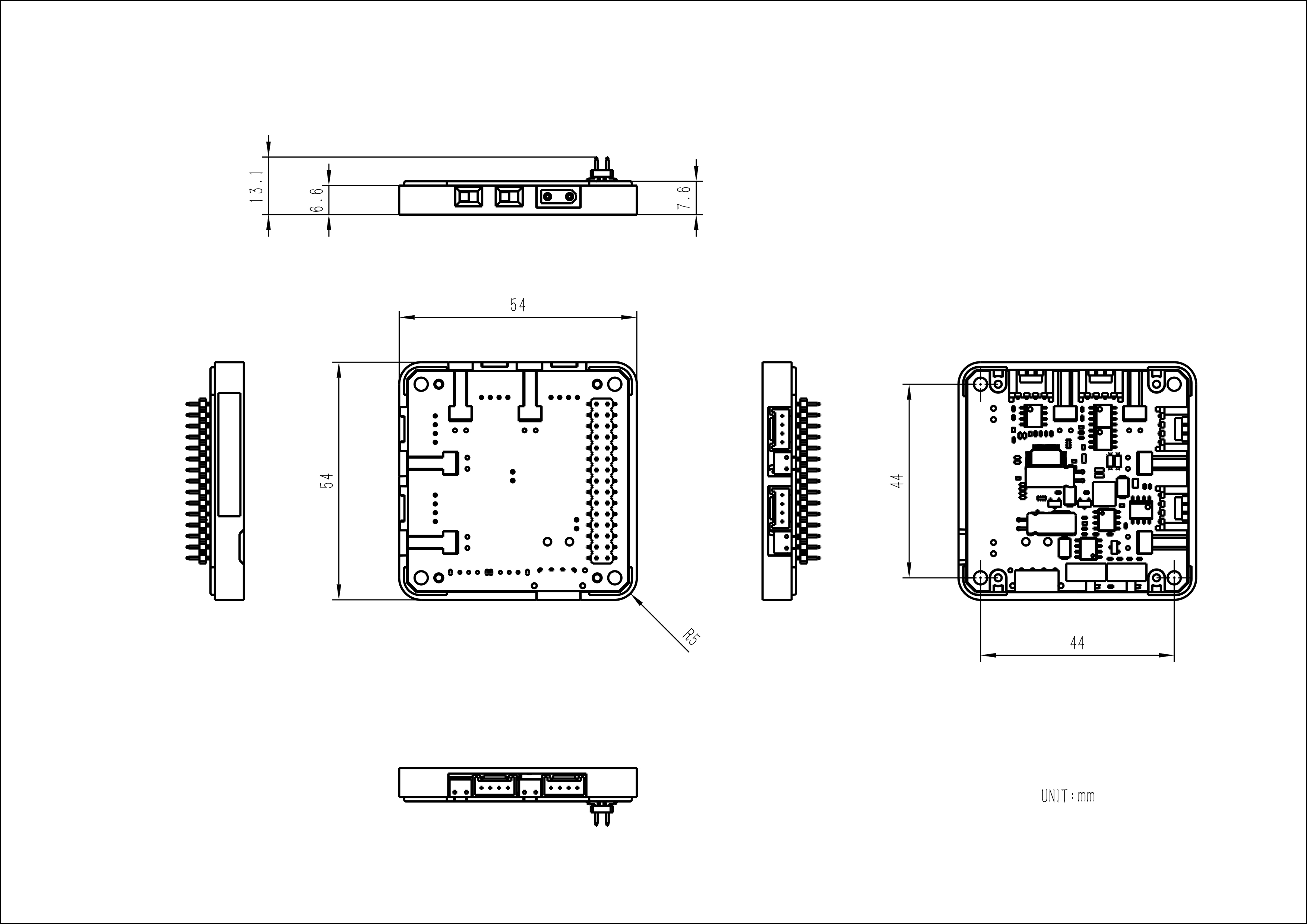
| 产品尺寸 | 54.0 x 54.0 x 13.1mm |
| 产品重量 | 15.8g |
| 包装尺寸 | 95.0 x 66.0 x 26.0mm |
| 毛重 | 45.7g |
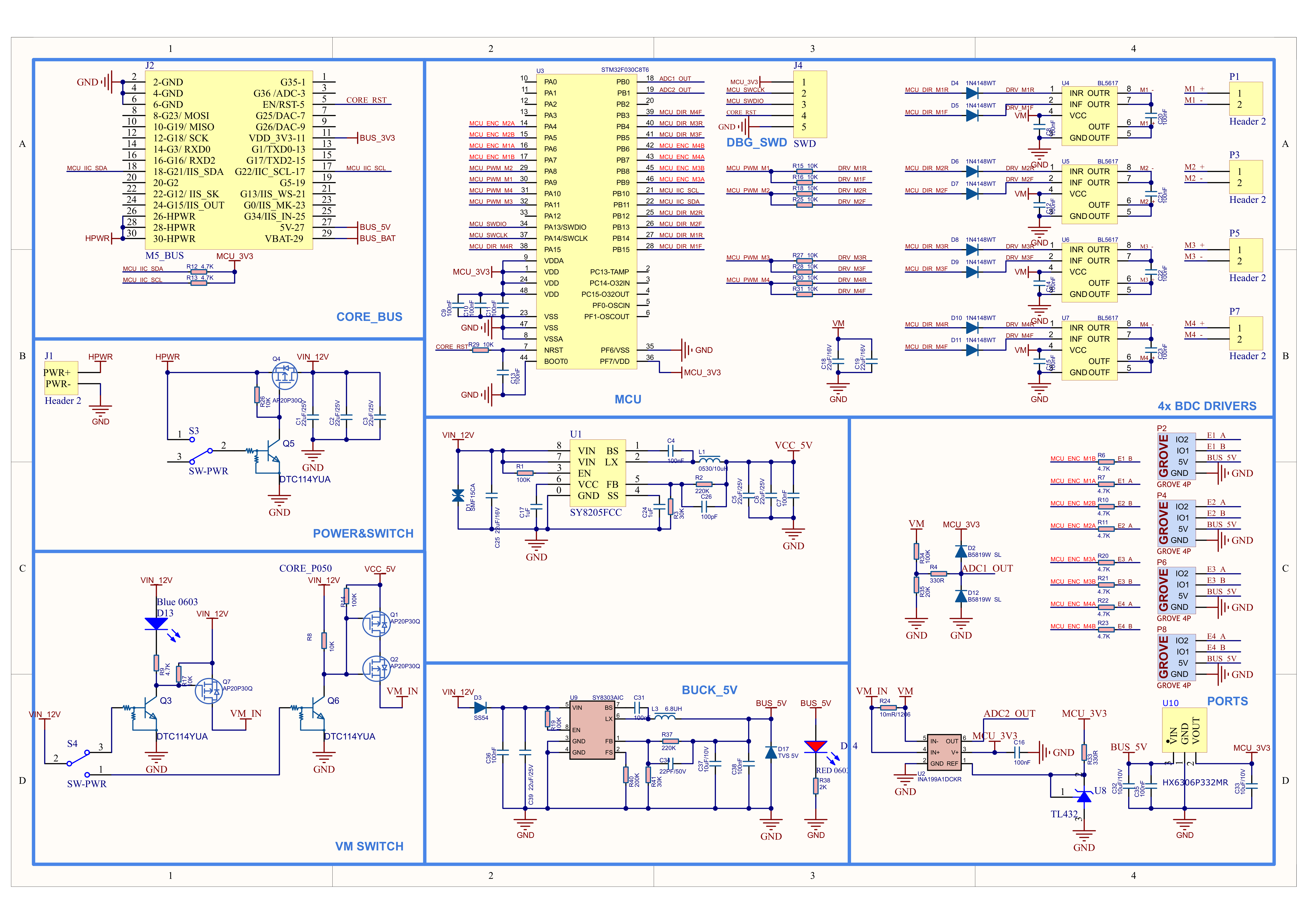
原理图
管脚映射
电流电压检测引脚
| STM32 | PB0 | PB1 |
|---|
| Motor Voltage Detect | ADC1_OUT | |
| Current Detect | | ADC2_OUT |
电机方向控制引脚
| STM32 | PB14/PB15 | PB12/PB13 | PB4/PB5 | PA15/PB3 |
|---|
| BL5617 (Direction) | MCU_DIR_M1R/MCU_DIR_M1F | MCU_DIR_M2R/MCU_DIR_M2F | MCU_DIR_M3R/MCU_DIR_M3F | MCU_DIR_M4R/MCU_DIR_M4F |
PWM 控制引脚
| STM32 | PA9 | PA8 | PA11 | PA10 |
|---|
| BL5617 (PWM) | MCU_PWM_M1 | MCU_PWM_M2 | MCU_PWM_M3 | MCU_PWM_M4 |
A/B 信号检测引脚
| STM32 | PA6/PA7 | PA4/PA5 | PB9/PB8 | PB7/PB6 |
|---|
| Encodering motors | E1_A/E1_B | E2_A/E2_B | E3_A/E3_B | E4_A/E4_B |
M5-Bus
| PIN | LEFT | RIGHT | PIN |
|---|
| GND | 1 | 2 | |
| GND | 3 | 4 | |
| GND | 5 | 6 | RST |
| 7 | 8 | |
| 9 | 10 | |
| 11 | 12 | |
| 13 | 14 | |
| 15 | 16 | |
| SDA | 17 | 18 | SCL |
| 19 | 20 | |
| 21 | 22 | |
| 23 | 24 | |
| HPWR | 25 | 26 | |
| HPWR | 27 | 28 | 5V |
| HPWR | 29 | 30 | BAT |
尺寸图
数据手册
软件开发
Arduino
UiFlow1
UiFlow2
Internal Firmware
通信协议
Easyloader
Module 4EncoderMotor 内置固件升级程序 Easyloader。
| Easyloader | 下载链接 | 备注 |
|---|
| Module 4EncoderMotor Firmware Upgrade Easyloader | download | / |
相关视频
- Module 4EncoderMotor 功能介绍