Module13.2 GRBL
SKU:M035
描述
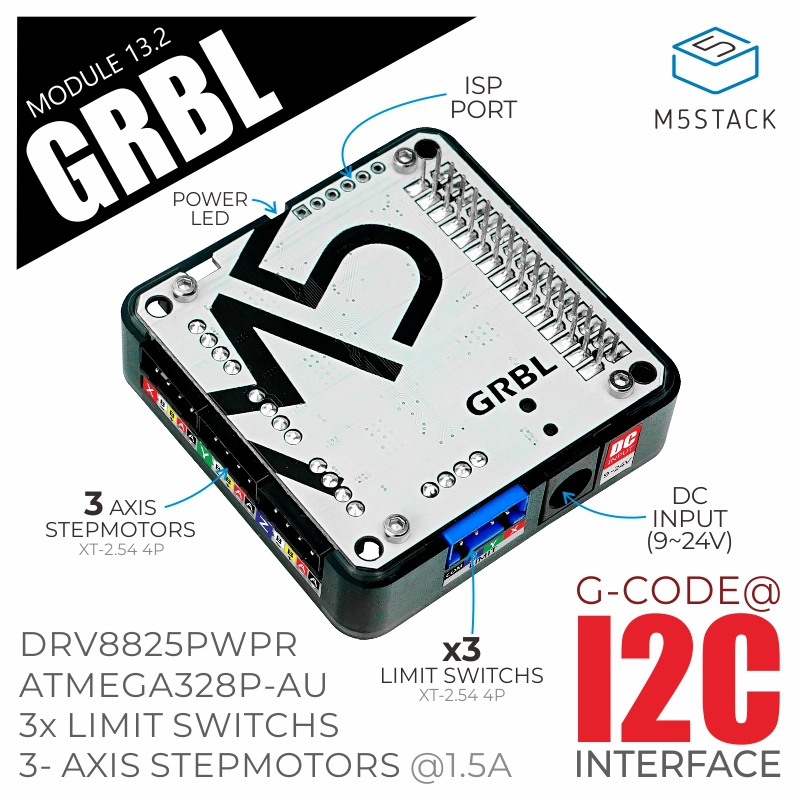
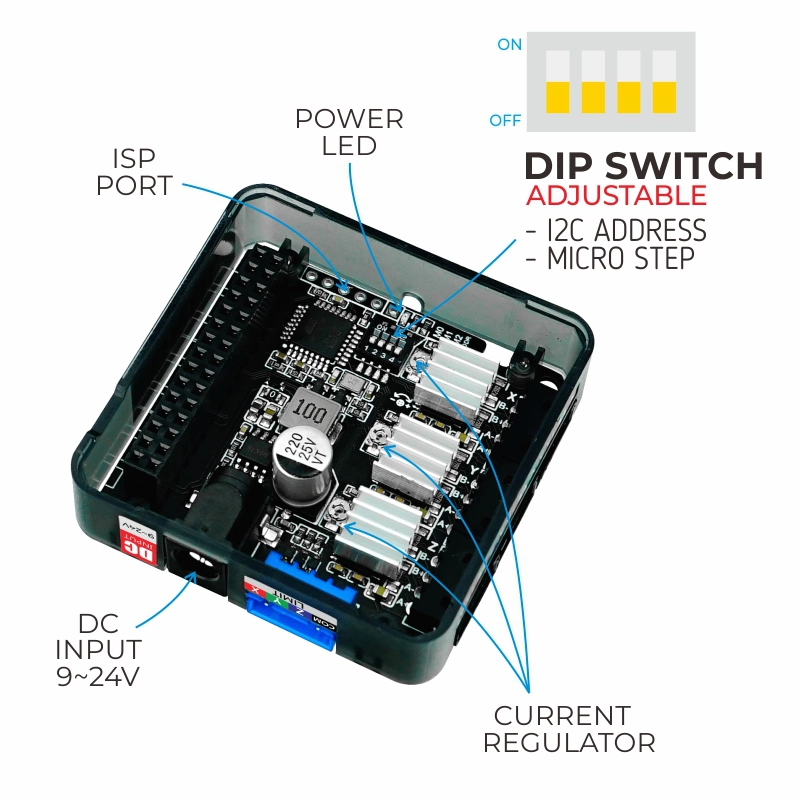
Module13.2 GRBL 是 M5Stack 堆叠模块系列中的一款三轴步进电机驱动模块,采用 ATmega328P-AU 控制器搭配三组 DRV8825PWPR 步进电机驱动芯片控制方案,能够同时驱动三台双极步进电机联动。提供 I2C 通信接口 (addr:0x70) 并集成拨码开关用于调节电机步进细分 (最大支持 1/32 步进细分) 与 I2C 地址调节 (支持双地址调节 0x70 , 0x71 ),这意味着你可以通过堆叠两块 Module13.2 GRBL 模块实现六轴控制。电源输入接口为 DC 9 ~ 24V ,电机驱动电流可达 1.5A ,开放三组限位开关信号接口,能够用于外接限位开关实现电机制动功能 (低电平有效) 。适用于多种步进电机运动控制场景,如打印机,机械臂等。
产品特性
- ATmega328P-AU 控制器
- 三轴 DRV8825PWPR 步进电机驱动器
- 驱动电流可达 1.5A
- 适用于双极步进电机
- 最大 1/32 模式 STEP 细分
- 限位开关接口 (低电平有效)
包装内容
应用场景
- 打印机
- 扫描仪
- 办公自动化机器
- 工厂自动化
- 机器人技术
规格参数
| 规格 | 参数 |
|---|
| 电机驱动芯片 | DRV8825PWPR |
| 控制器芯片 | ATmega328P-AU |
| 通信接口 | I2C 通信 @ 0x70, 0x71 |
| 单通道最大驱动电流 | 1.5A |
| 支持最大步进细分 | 1/32 |
| 接口类型 | XT2.54-4P |
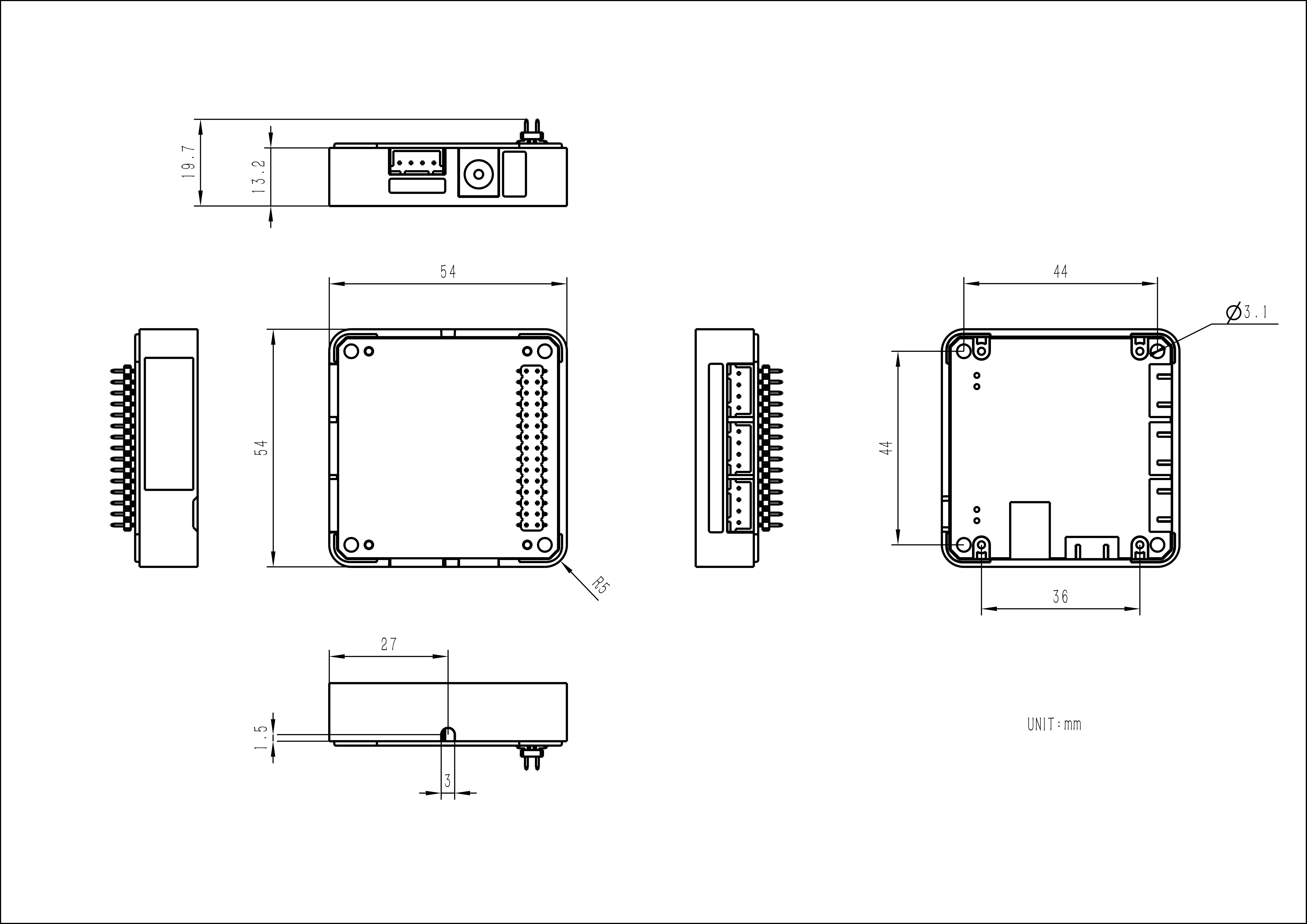
| 产品尺寸 | 54.2 x 54.2 x 13.2mm |
| 产品重量 | 22.5g |
| 包装尺寸 | 95.0 x 65.0 x 25.0mm |
| 毛重 | 42.3g |
操作说明
步进细分调节
| MODE2 | MODE1 | MODE0 | STEP MODE |
|---|
| 0 | 0 | 0 | Full step (2-phase excitation) with 71% current |
| 0 | 0 | 1 | 1/2 step (1-2 phase excitation) |
| 0 | 1 | 0 | 1/4 step (W1-2 phase excitation) |
| 0 | 1 | 1 | 1/8 step |
| 1 | 0 | 0 | 1/16 step |
| 1 | 0 | 1 | 1/32 step |
| 1 | 1 | 0 | 1/32 step |
| 1 | 1 | 1 | 1/32 step |
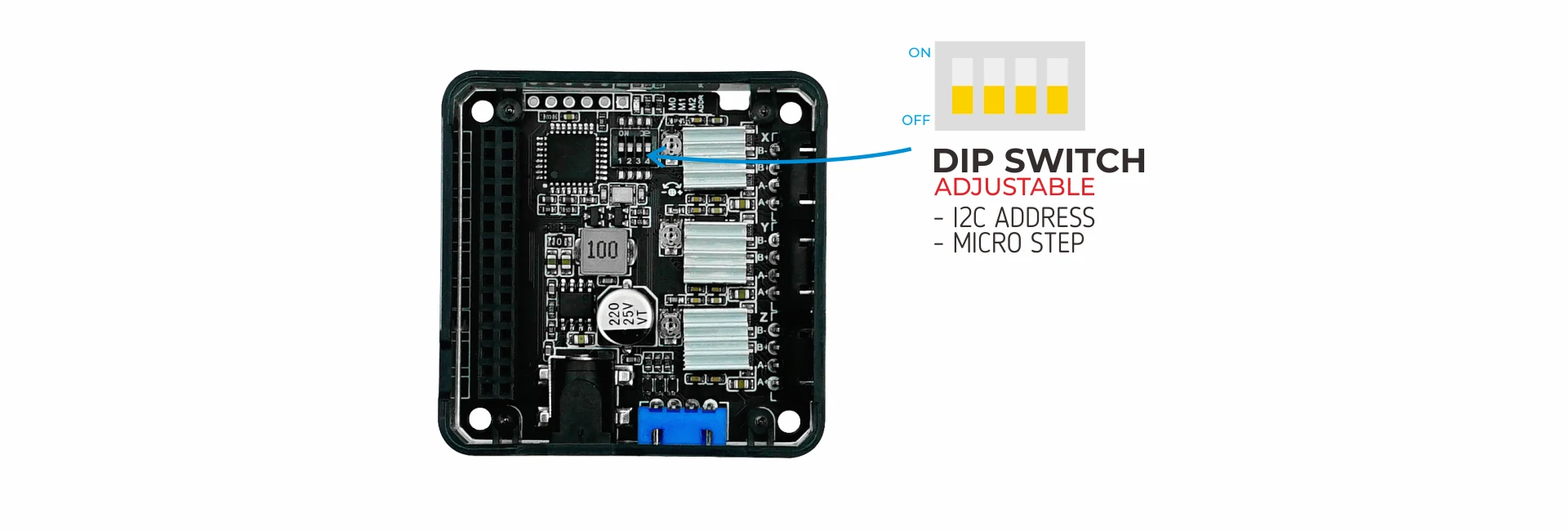
I2C 地址调节
| Switch | Address |
|---|
| 0 | 0x70 |
| 1 | 0x71 |
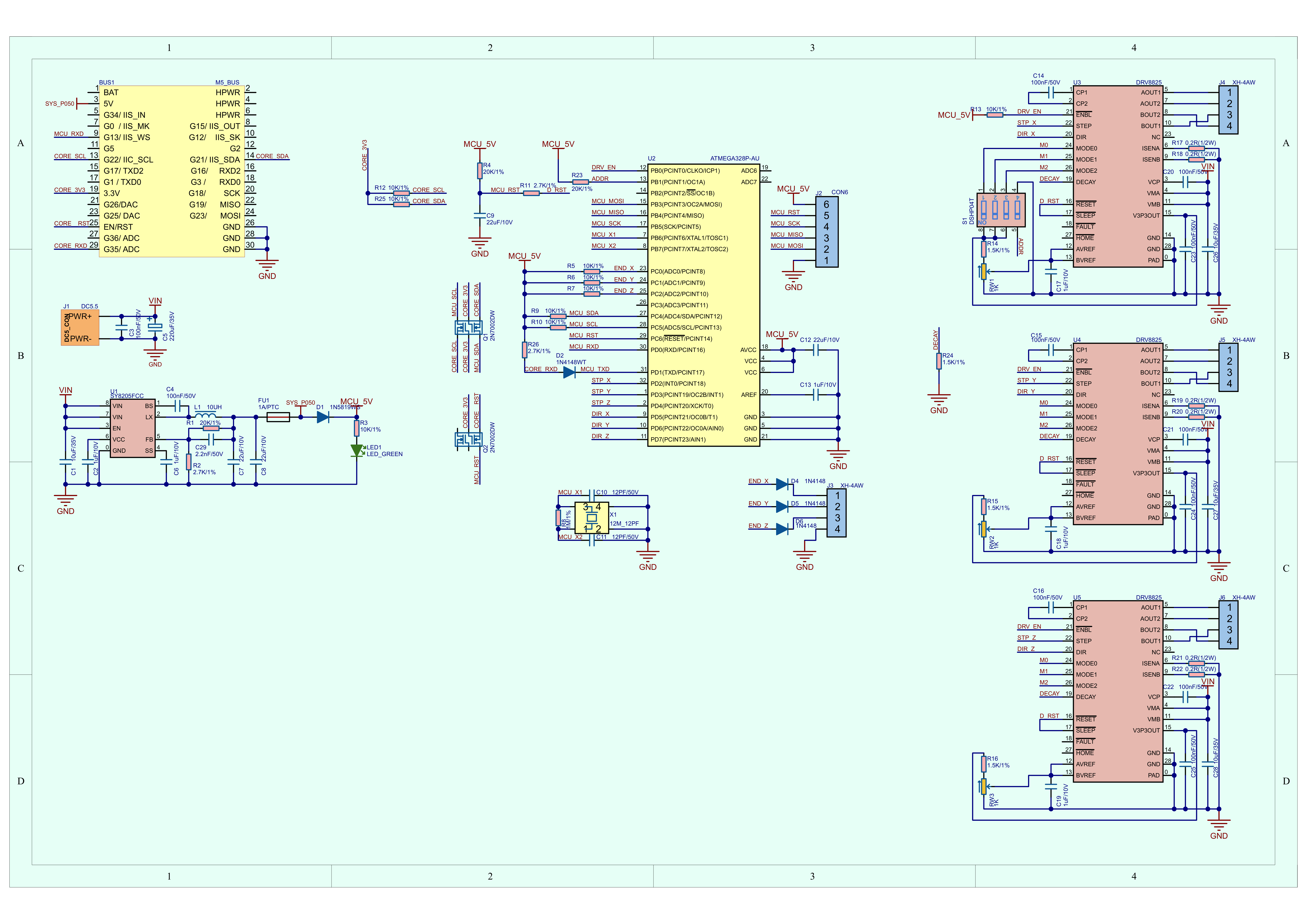
原理图
管脚映射
M5-Bus
| PIN | LEFT | RIGHT | PIN |
|---|
| GND | 1 | 2 | TXD |
| GND | 3 | 4 | |
| GND | 5 | 6 | RST |
| 7 | 8 | |
| 9 | 10 | |
| 11 | 12 | 3V3 |
| 13 | 14 | |
| 15 | 16 | |
| SDA | 17 | 18 | SCL |
| 19 | 20 | |
| 21 | 22 | RXD |
| 23 | 24 | |
| 25 | 26 | |
| 27 | 28 | 5V |
| 29 | 30 | |
尺寸图
数据手册
软件开发
Arduino
UiFlow1
UiFlow2
Easyloader
| Easyloader | 下载链接 | 备注 |
|---|
| Module13.2 GRBL Example Easyloader with M5Core | download | / |
相关视频