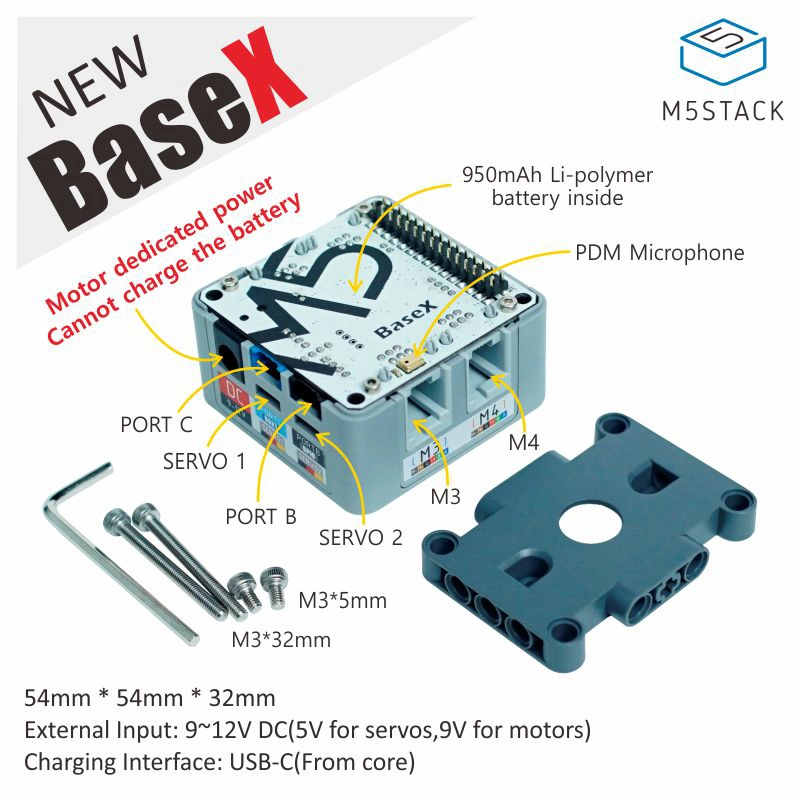
Base X is a specialized base compatible with LEGO EV3 motors. Its structural design is similar to BASE26, supporting multiple mounting methods, and additionally providing a LEGO connector base that allows Base X to be easily integrated into LEGO builds. Base X can connect up to 4 LEGO motors (RJ11) simultaneously, supporting angle/speed reading and control, perfectly compatible with the original motor functions. In addition, the base provides 2 servo interfaces for direct servo angle control, a built-in PDM microphone for sound acquisition, a UART interface (16/17), and a GPIO interface (26/36), making it more flexible for connecting various sensors in different scenarios. The base has a built-in 950mAh battery that can be charged via the M5Core’s USB Type-C port to extend battery life. To improve the driving capability of the interfaces, the base is equipped with a DC power jack for powering motors using an external 9 ~ 12V DC power supply (charging through the base is not supported).
Features
4-way RJ12 LEGO motor interface (total maximum current output 2A for the base)
2-way servo drive (total maximum current output 2A for the base)
1-way UART
1-way GPIO
Built-in PDM microphone (G34)
Onboard DC-DC conversion (9 ~ 12V input, for independent motor power only)
Built-in 950mAh battery
Multiple mounting methods / LEGO hole support
Applications
LEGO encoder motor/servo controller
Intelligent control for LEGO DIY toys
Includes
1 x Base X
1 x LEGO Base
2 x M3 * 5mm 304 Stainless Steel Hex Socket Bolt
2 x M3 * 32mm 304 Stainless Steel Hex Socket Bolt
1 x Hex Key L-Shape 2.5mm (For M3 Screw)
Specifications
Specification
Parameter
MCU
STM32F030C8T6
Communication Interface
I2C Communication @0x22
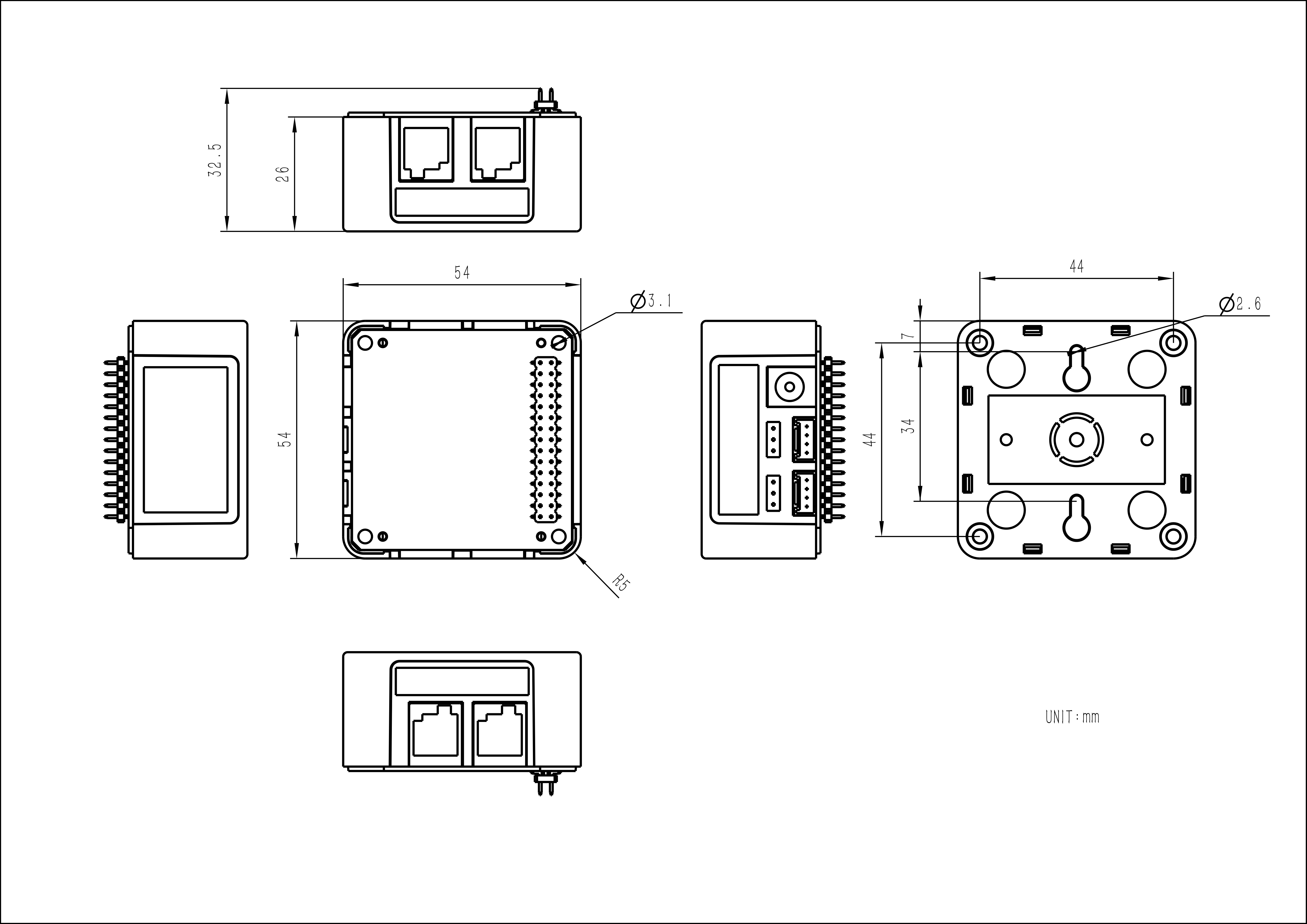
Product Size
54.0 x 54.0 x 26.0mm
Product Weight
59.0g
Package Size
150.0 x 65.0 x 40.0mm
Gross Weight
110.0g
PinMap
M5-Bus
Switch
The pins in the M5-Bus below marked as SW can be switched via the DIP switch to adapt to different main controllers.