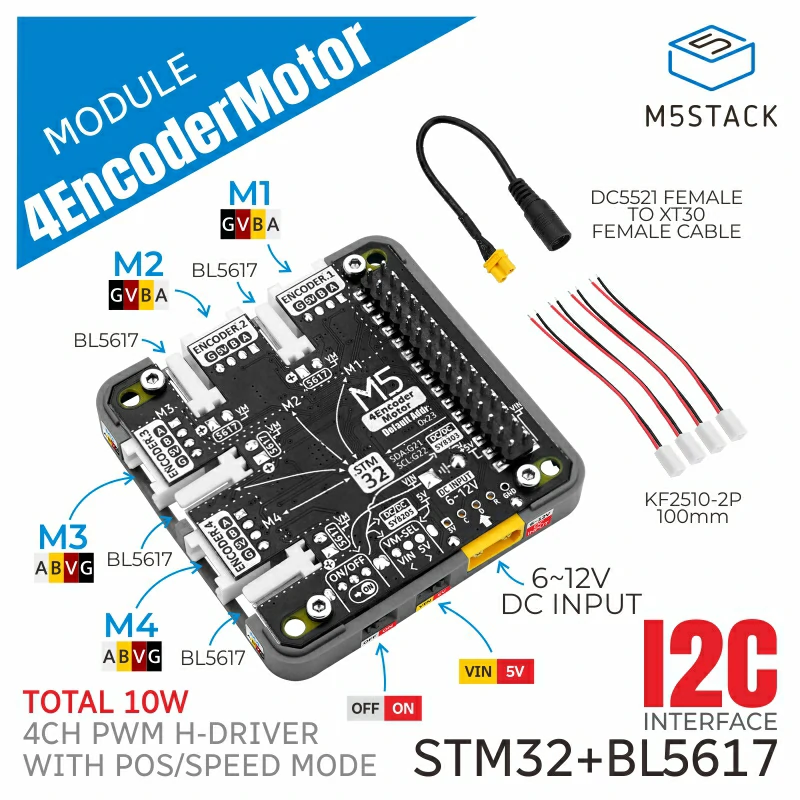
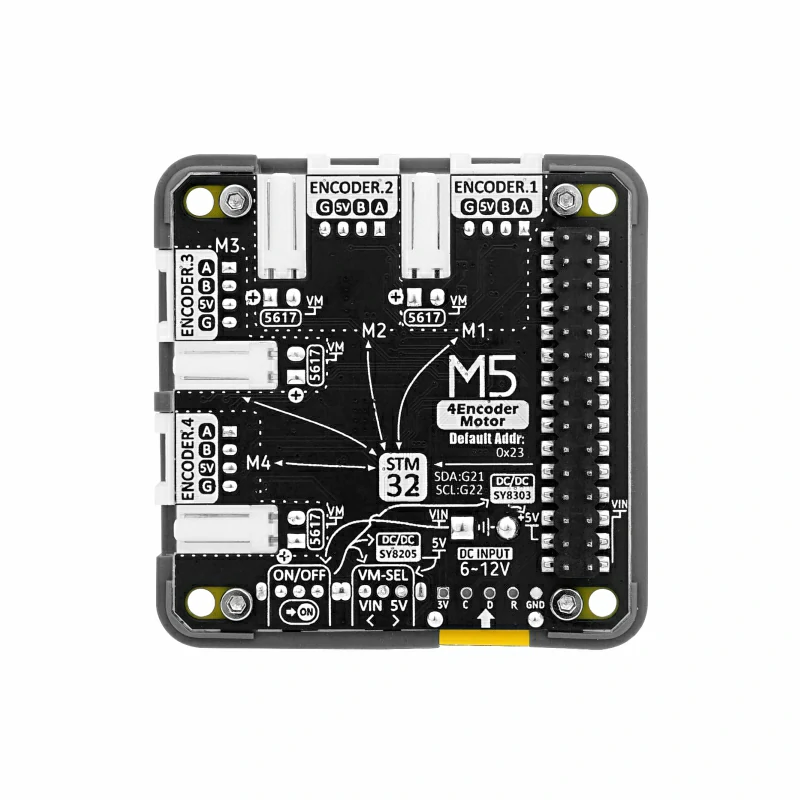
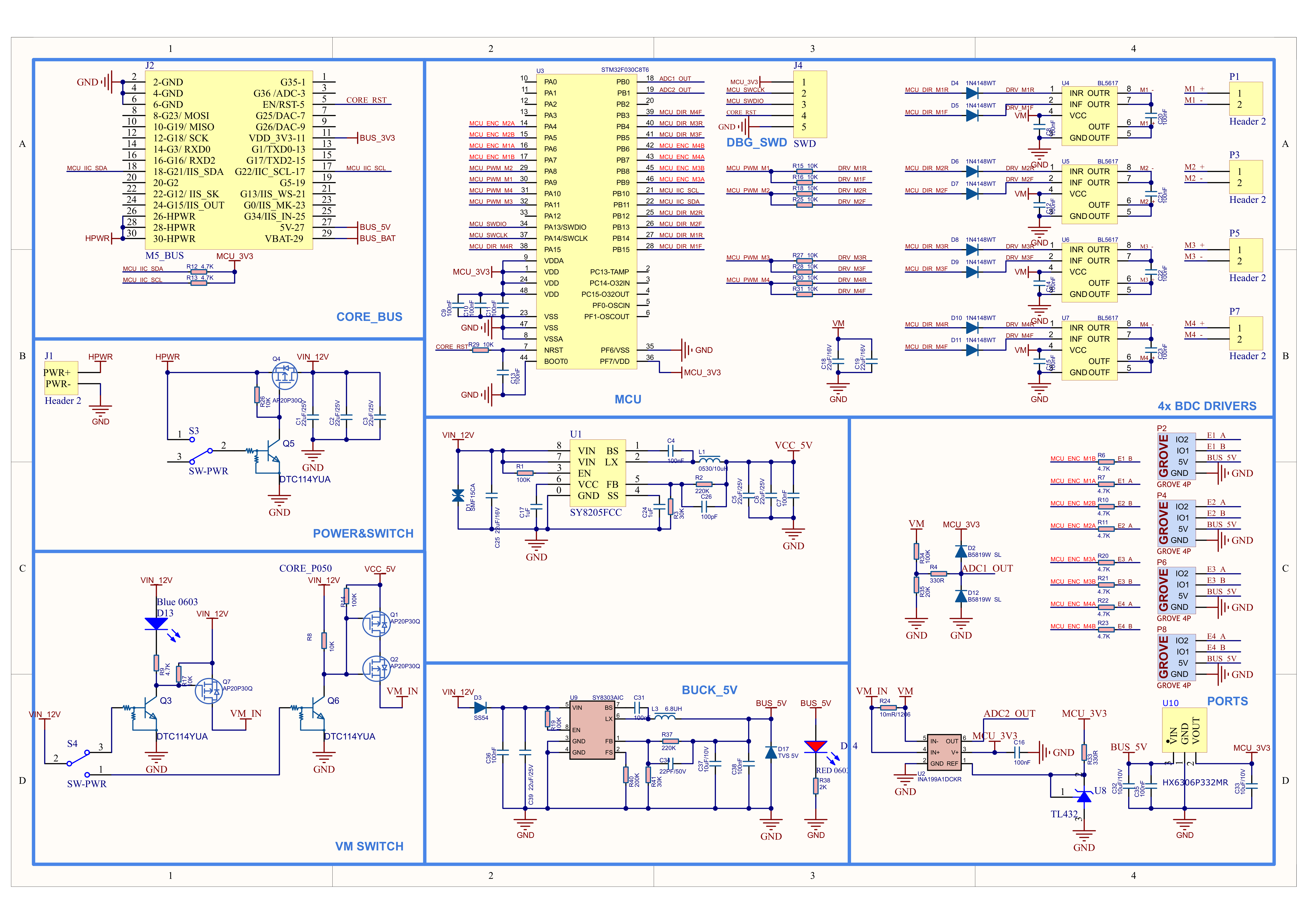
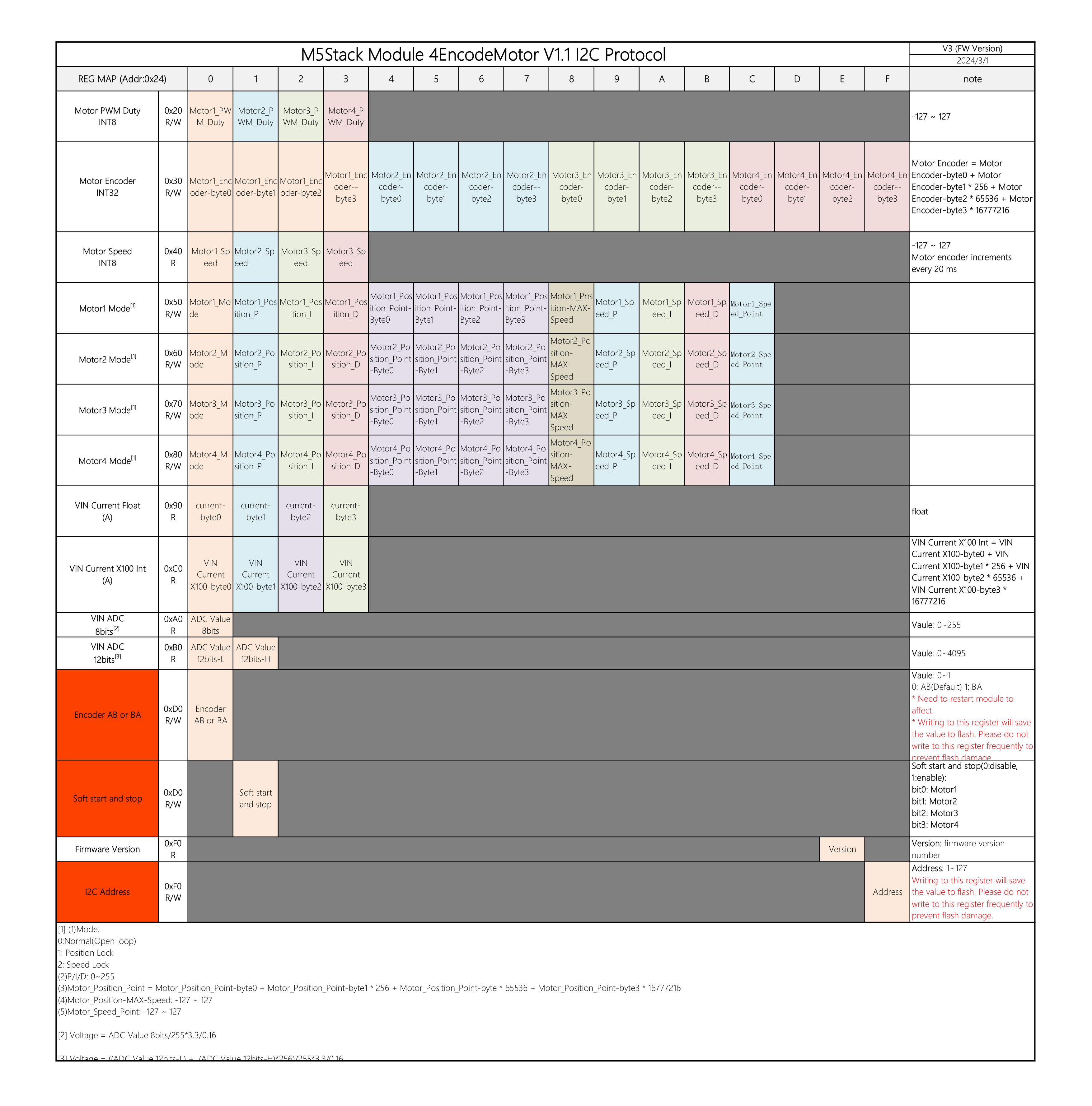
Module 4EncoderMotor is a 4-channel encoder motor driver module adopting STM32 + BL5617 H-Bridge driver IC solution. Communicating via I2C, it supports slave address modification, providing flexible control options. Through AB pulse encoder signal input, it enables precise motor motion status and position detection. It supports modes such as duty cycle control, absolute position positioning, and speed adjustment, achieving motor forward rotation, reverse rotation, stop, and brake functions. It integrates INA199 power monitoring to monitor voltage and current status in real time. Onboard power input switch allows for DC 5V or external DC 6 ~ 12V power input selection. It is suitable for applications in robotic motion control, automation equipment, intelligent vehicles, laboratory equipment, and industrial automation systems.
Features
4-channel encoder motor driver
AB pulse signal input
Duty cycle, absolute position positioning, speed adjustment control modes