

Hat CBack Driver
SKU:A100






描述
Hat CBack Driver是一款兼容 M5StickC 的舵机驱动板,采用 STM32F030F4P6 控制方案,采用 I2C 通信接口与 M5StickC 进行通信, 提供 4 组 PWM 舵机驱动接口(舵机的驱动电源直连 M5StickC 的内部的电池,能够驱动一般规格的舵机,如:SG90 等)。该模块对 StickC 顶部的 I2C 总线进行了引出,并通过 STM32 拓展额外提供一组 GPIO 接口。能够用于一般逻辑电平与 ADC 模拟信号输入读取。背部 LEGO 兼容孔设计,用户能够非常方便的将这个驱动板集成到 LEGO 积木结构中,可用于构建如舵机机械手等可控结构。
产品特性
- 4 x Servo 驱动
- 兼容 C/C Plus
- 接口拓展 (GPIO, I2C)
包装内容
- 1 x Hat CBack Driver
- 2 x 六角螺丝 M2*5
- 1 x 内六角扳手
- 1 x 乐高兼容连接件
应用场景
- 舵机控制器
- 机器人控制
规格参数
| 规格 | 参数 |
|---|---|
| MCU | STM32F030F4P6 |
| 通信接口 | I2C 通信 @ 0x38 |
| 工作电流 | 15mA |
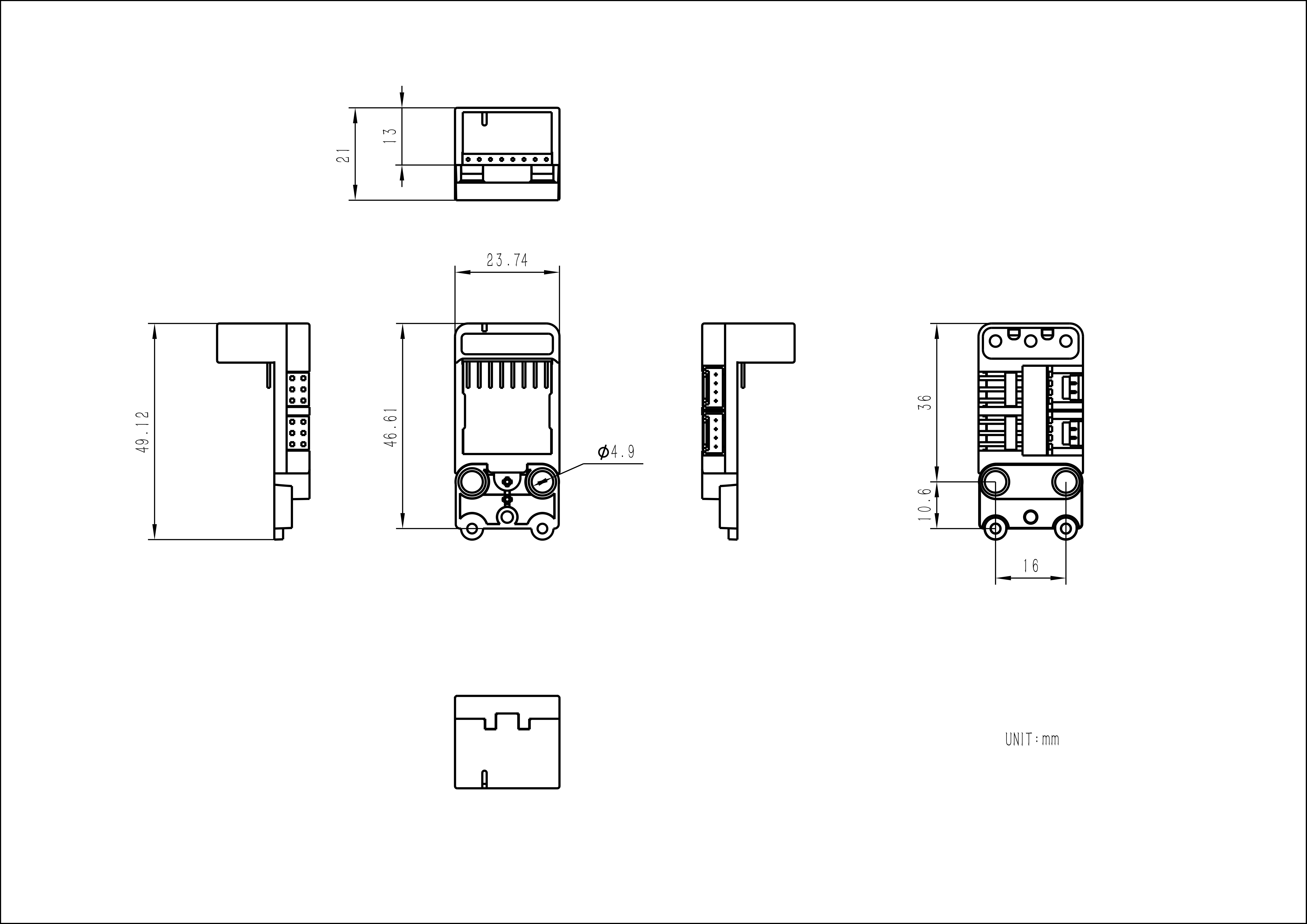
| 产品尺寸 | 23.7 x 49.2 x 21.0mm |
| 产品重量 | 9.0g |
| 包装尺寸 | 138.0 x 93.0 x 22.0mm |
| 毛重 | 13.5g |
原理图
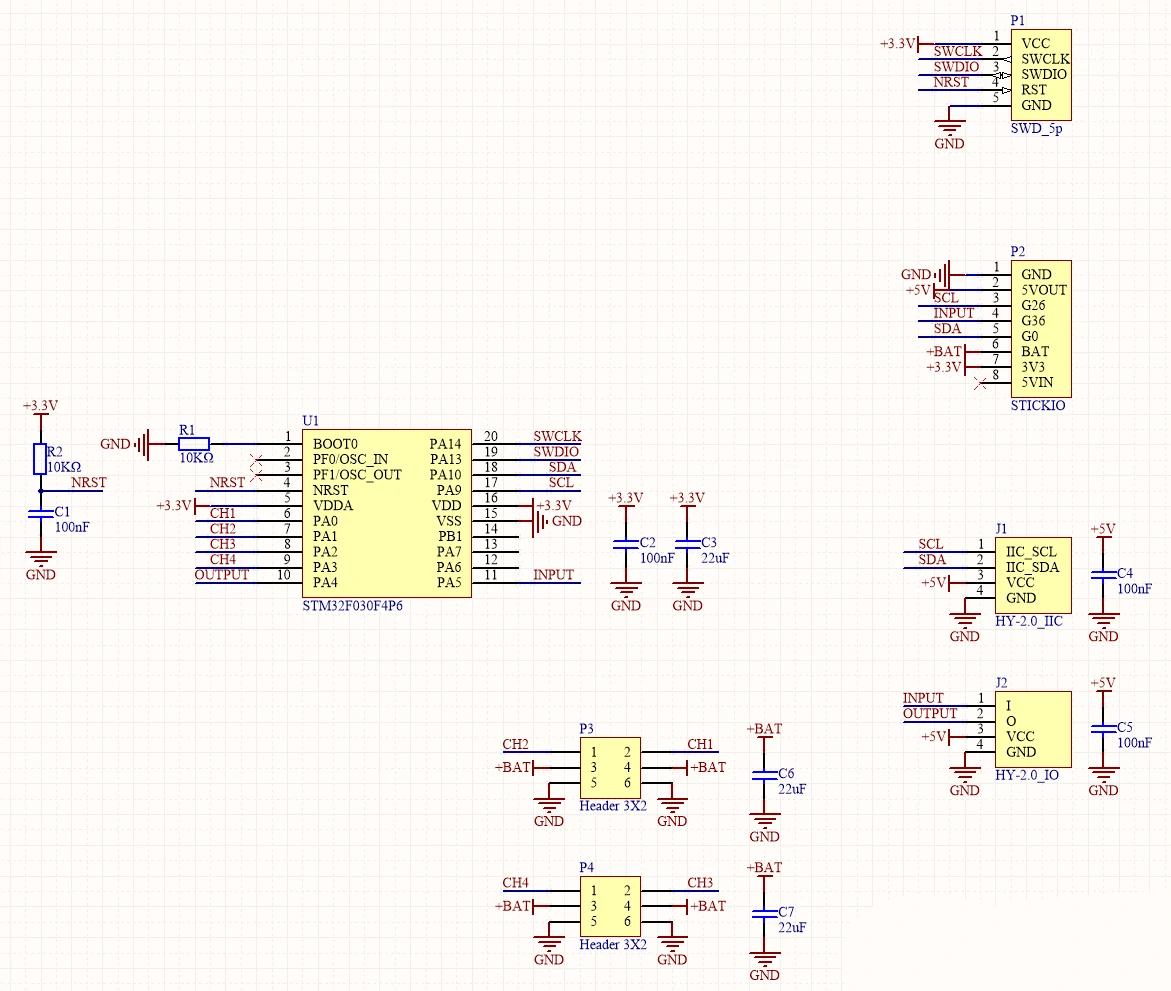
管脚映射
| M5StickC | G0 | G26 | 3.3V | GND |
|---|---|---|---|---|
| C Back Driver | SDA | SCL | 3.3V | GND |
尺寸图
软件开发
UiFlow1
通信协议
- 协议类型 I2C
- I2C Address: 0x38
/*------------------------------------------------ -------------------------------------------------- */
| SERVO_ANGLE_REG | 0x00-0x03
| ------------------------------------------------- -----------------------------------------------
| servo_1_reg[0] 0x00 | R/W | SERVO1 Angle value(0~180)
| servo_2_reg[1] 0x01 | R/W | SERVO2 Angle value(0~180)
| servo_3_reg[2] 0x02 | R/W | SERVO3 Angle value(0~180)
| servo_4_reg[3] 0x03 | R/W | SERVO4 Angle value(0~180)
/*------------------------------------------------ -------------------------------------------------- -
/*------------------------------------------------ -------------------------------------------------- */
| SERVO_PULSE_REG | 0x10-0x17
| ------------------------------------------------- -----------------------------------------------
| servo_1_reg[0:1] 0x10-0x11 | R/W | SERVO1 PULSE value(500~2500)
| servo_2_reg[2:3] 0x12-0x13 | R/W | SERVO2 PULSE value(500~2500)
| servo_3_reg[4:5] 0x14-0x15 | R/W | SERVO3 PULSE value(500~2500)
| servo_4_reg[6:7] 0x16-0x17 | R/W | SERVO4 PULSE value(500~2500)
/*------------------------------------------------ -------------------------------------------------- -
/*------------------------------------------------ -------------------------------------------------- */
| PPORTB_ADC_REG | 0x20-0x21
| ------------------------------------------------- -----------------------------------------------
| portb_adc_reg[0:1] 0x20-0x21 | R | PPORTB ADC value(0~4095)
/*------------------------------------------------ -------------------------------------------------- -
/*------------------------------------------------ -------------------------------------------------- */
| PPORTB_OUTPUT_REG | 0x30
| ------------------------------------------------- -----------------------------------------------
| portb_output_reg[0] 0x30 | R | PPORTB Output Digital value(0/1)
/*------------------------------------------------ -------------------------------------------------- -
/*------------------------------------------------ -------------------------------------------------- */
| PPORTB_INPUT_REG | 0x31
| ------------------------------------------------- -----------------------------------------------
| portb_input_reg[0] 0x31 | R | PPORTB Input Digital value(0/1)
/*------------------------------------------------ -------------------------------------------------- -
相关视频
- 使用 Hat CBACK Driver 制作四轮小车