
CoreMP135
SKU:K135








説明
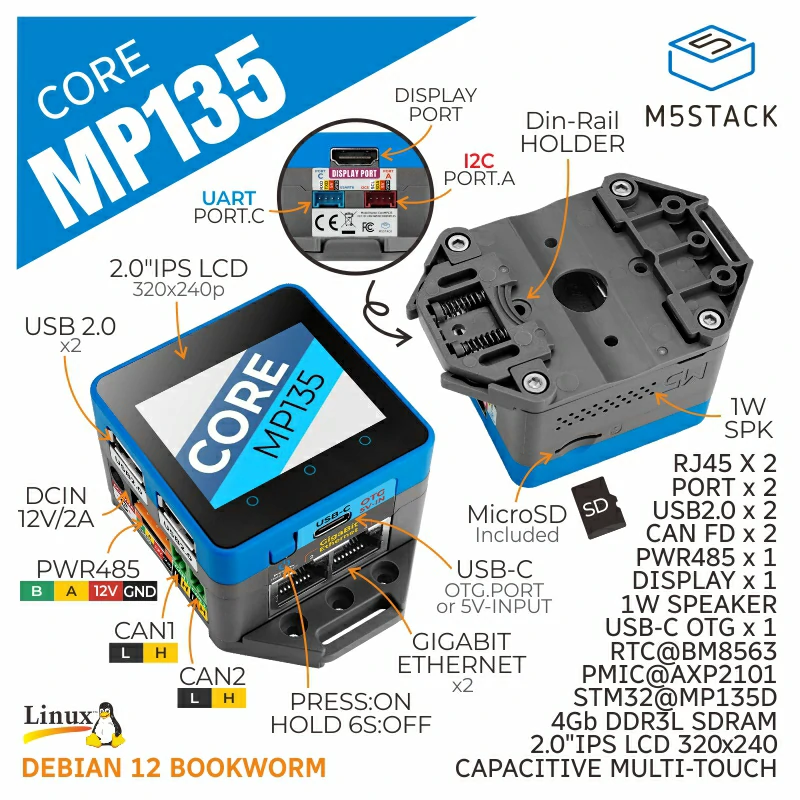
CoreMP135 は、STM32MP135DAE7 チップを搭載した統合型 Linux 産業用コントローラです。シングルコア ARM Cortex-A7 プロセッサ(最大動作周波数 1 GHz)を内蔵し、4Gbit DDR3L SDRAM を搭載しています。 高度な産業オートメーション、スマートホーム・マルチメディアエンターテインメント機器、産業用 IoT エッジゲートウェイ、ロボットモーション制御ハブなど、幅広い分野への活用に対応します。
CoreMP135 は多彩なインターフェースを備えています:
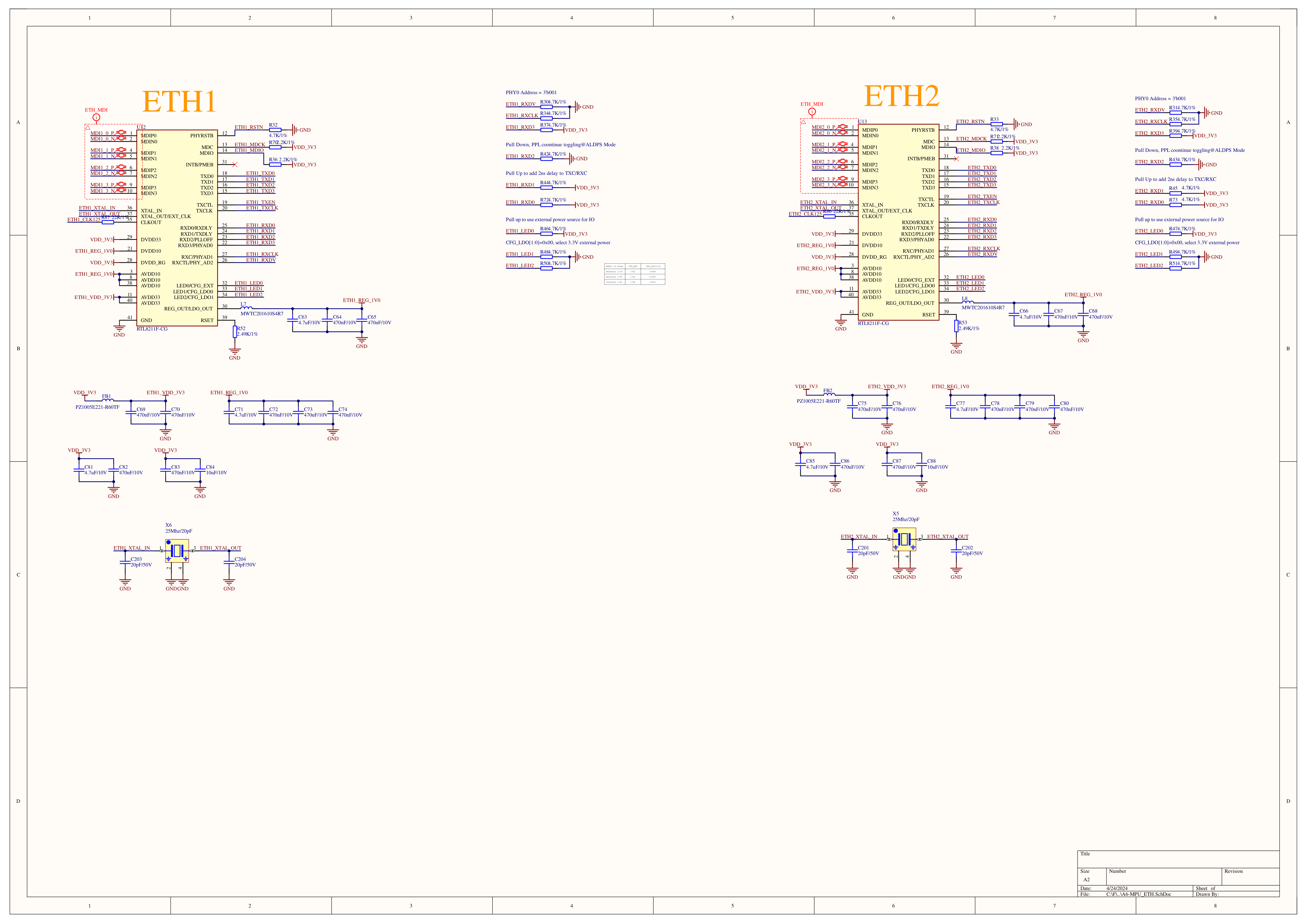
- 2 x ギガビットイーサネット GbE インターフェース
- 1 x HD ビデオ出力インターフェース
- 2 x USB2.0-A インターフェース
- 1 x USB-C インターフェース(OTG および電源供給対応)、microSD カードスロット
- 2 x CAN FD インターフェース
- 1 x PWR485(9〜24V 電源入力 + RS485)インターフェース
- 2 x Grove(I2C & UART)インターフェース
HMI(ヒューマンマシンインターフェース)については、CoreMP135 は 2.0 インチ IPS 静電容量式タッチスクリーンを内蔵し、1W スピーカー(16 ビット I2S 駆動)を搭載しています。低消費電力設計を採用し、AXP2101 電源管理チップおよび内蔵 BM8563 RTC を搭載することで、タイマーウェイクアップとスリープ機能をサポートします。充電式バッテリーによる給電に対応するほか、DC 電源インターフェースを備え、DC 12V@2A の外部直流電源による給電も可能です。多様な設置環境に対応するため、底部に DIN レールベースプレートを装備し、壁掛けおよびネジ固定による取り付けをサポートしています。
クイックスタート
特徴
- STM32MP135DAE7@Arms Cortex-A7@1GHz
- Linux 標準プラットフォーム
- 豊富な周辺インターフェース (CAN\RS485\ ギガビットネットワークポートなど)
- 2.0 " タッチスクリーン
- PMU
- オーディオ出力
- microSD および 4Gbit DDR3L SDRAM
- M5-Bus&ポート A/C
- DIN レール レールは簡単に取り付け可能
- Development Platform
- UiFlow2
含まれるもの
- 1x CoreMP135
- 1x M3 六角レンチ
- 1x HT3.96-4P
- 2x ターミナル 2.54mm-2P (緑)
- 1x microSD カード (本体に装着済み)
- 1x ユーザーマニュアル
アプリケーション
- 産業オートメーション
- スマートホーム
- 産業用 IoT エッジゲートウェイ
- 教育および開発
- ロボットモーションセンターコントローラー
仕様
| 仕様 | パラメータ |
|---|---|
| MCU | STM32MP135DAE7@シングルコア Arm Cortex-A7 プロセッサ、メイン周波数 1GHz |
| 電源管理チップ | AXP2101 |
| 485 通信 | MAX3485 |
| CAN 通信 | 2 チャンネル SIT1051T/3 (高速 FDCAN) |
| USB ハブインターフェイス | GL852G (2x USB2.0) 1x USBC (OTG および電源供給サポート) |
| HD ビデオインターフェイスチップ | LT8618SXB (色深度 24 ビットまで対応) |
| DDR3L SDRAM | 4Gbit |
| イーサネット | RTL8211F (最大 1Gbps のデータ転送レートをサポート) 2x RJ45 |
| RTC | BM8563 |
| 液晶 | ILI9342C (2.0inch IPS LCD) 解像度:320x240px |
| タッチパネル | FT6336U |
| パワーアンプ | NS4168 (モノラル D 級パワーアンプ) I2S シリアル・デジタル音声入力 幅広いサンプリングレートに対応 対応サンプリングレートの範囲: 8kHz〜96kHz |
| スピーカー | 2014 Cavity horn: 1W@8Ω |
| DC 電源入力 | DC 12V@2A |
| 動作温度範囲 | 0〜40℃ |
| 電源 | DC 12V@2A OR USB-C 5V@3A |
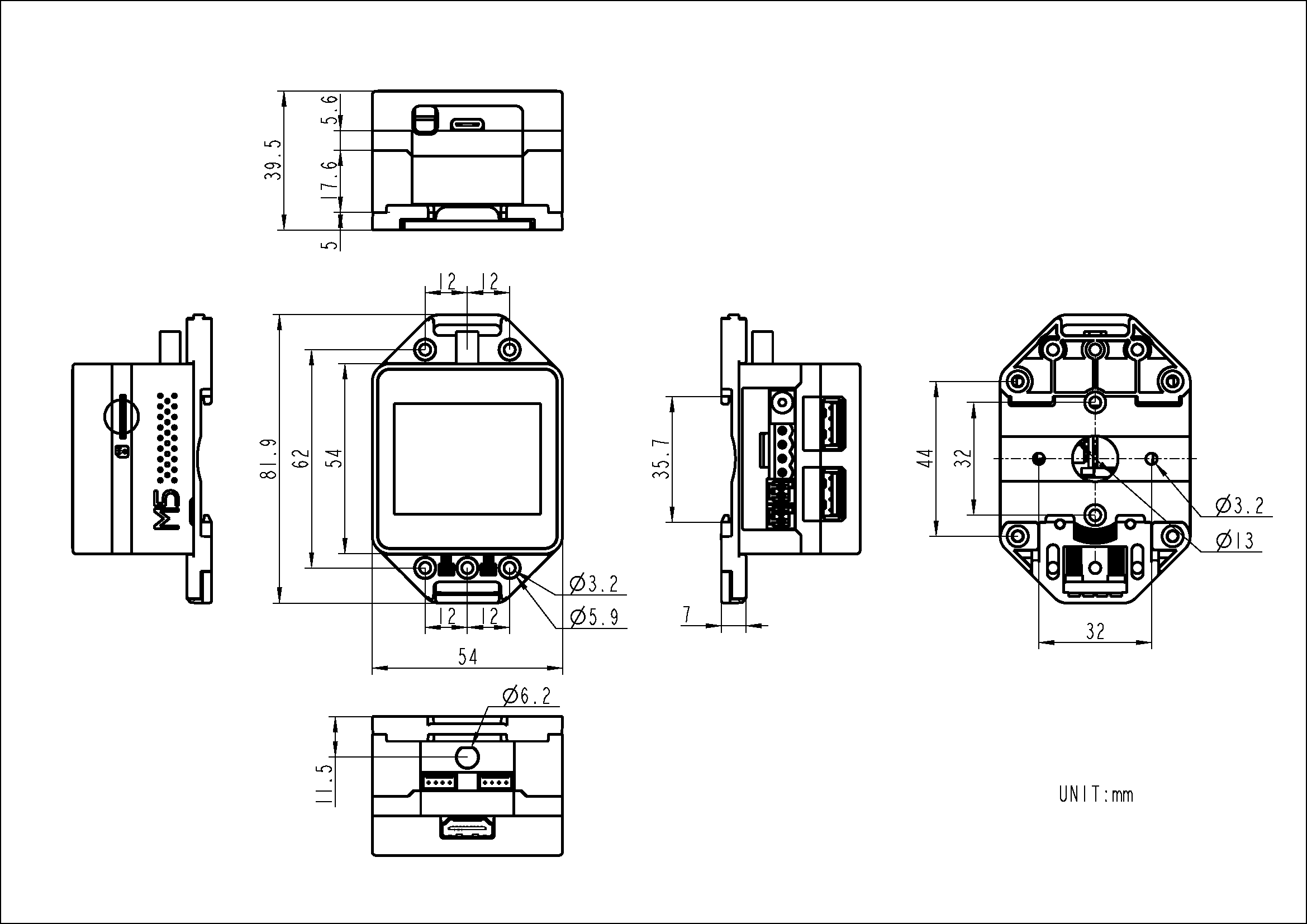
| 製品サイズ | 81.9 x 54.0 x 39.5mm |
| 製品重量 | 98.3g |
| 梱包サイズ | 122.2 x 71.5 x 61.6mm |
| 梱包重量 | 154.7g |
操作説明
M5-Bus Power
CoreMP135 M5-Bus 電源バスの入出力制御:
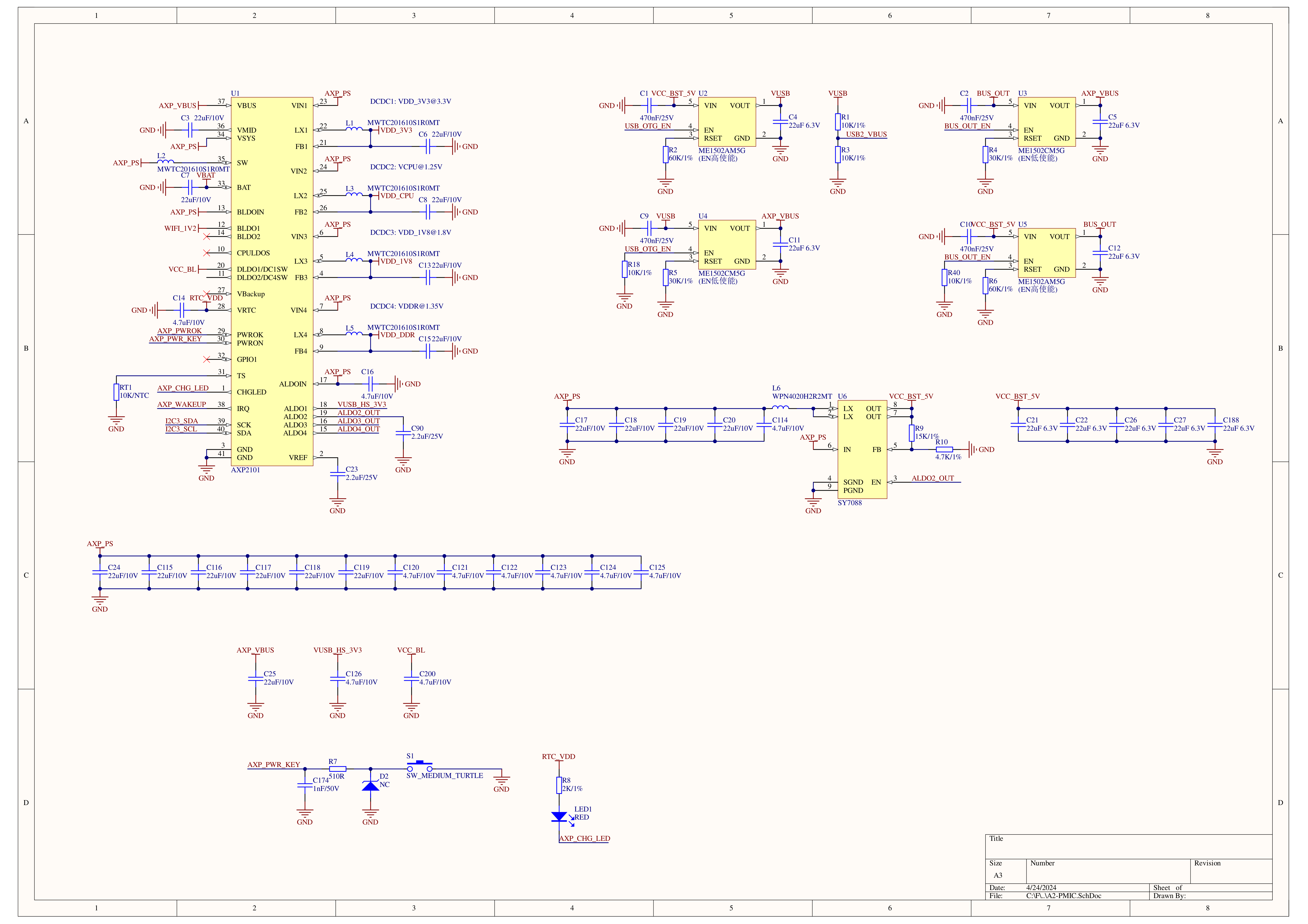
回路図を参照して、BUS_OUT_EN を低レベルに設定すると、バス 5V は入力モードになり、高レベルに設定すると、バス 5V は出力モードになります。次のコマンドを使用して、下向きの出力をオンにすることができます。
echo 131 > /sys/class/gpio/export && echo out > /sys/class/gpio/PI3/direction
echo 1 > /sys/class/gpio/PI3/value
# echo 0 > /sys/class/gpio/PI3/valueCoreMP135 モジュールバス電源設定
CoreMP135 のバス電源はデフォルトでオフになっています。I2C アドレスのスキャンやモジュール初期化を行う前に、以下のコマンドを実行して手動でバス電源をオンにしてください。オンにしない場合、モジュールが認識されない、または I2C アドレスをスキャンできない問題が発生します。
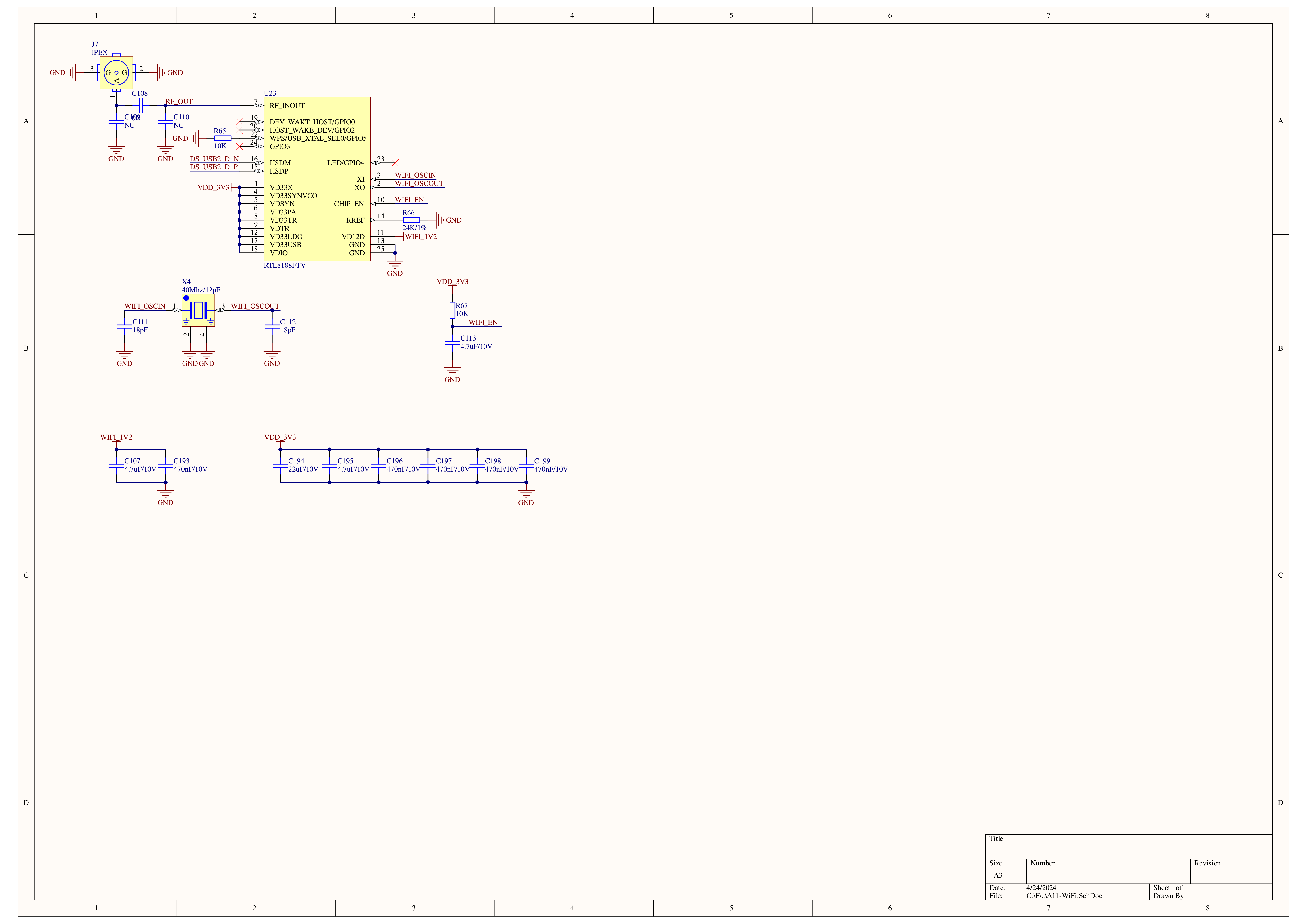
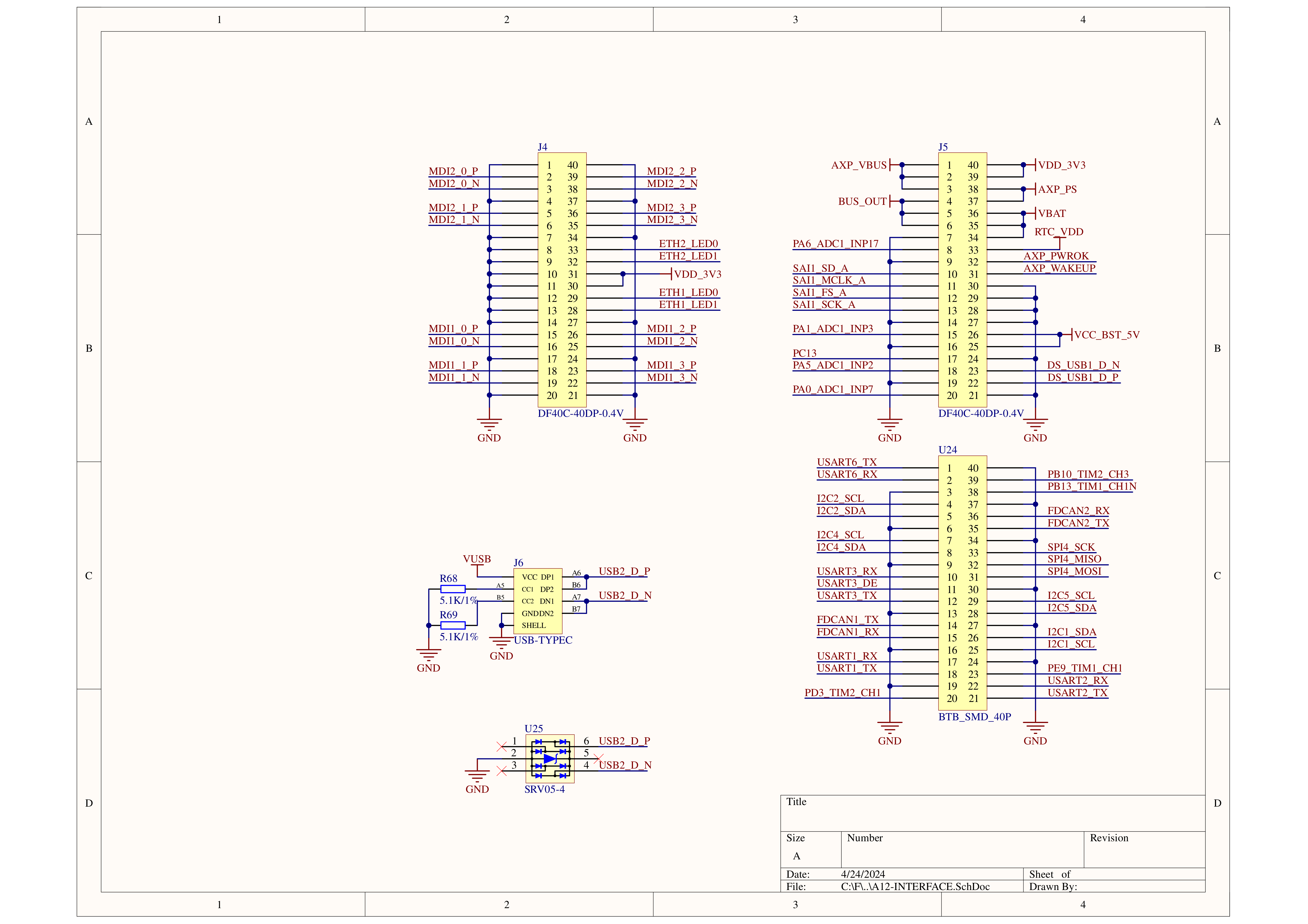
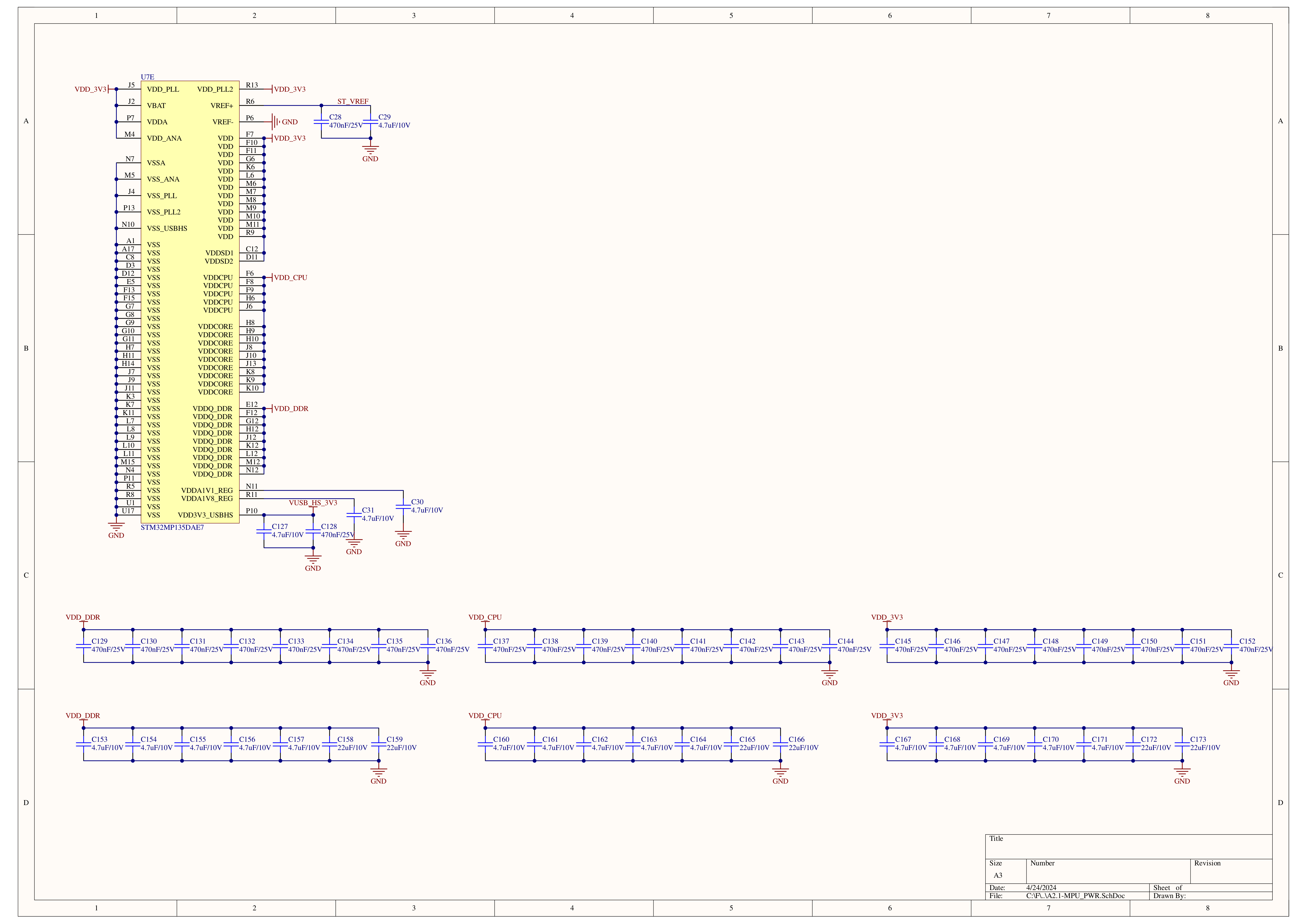
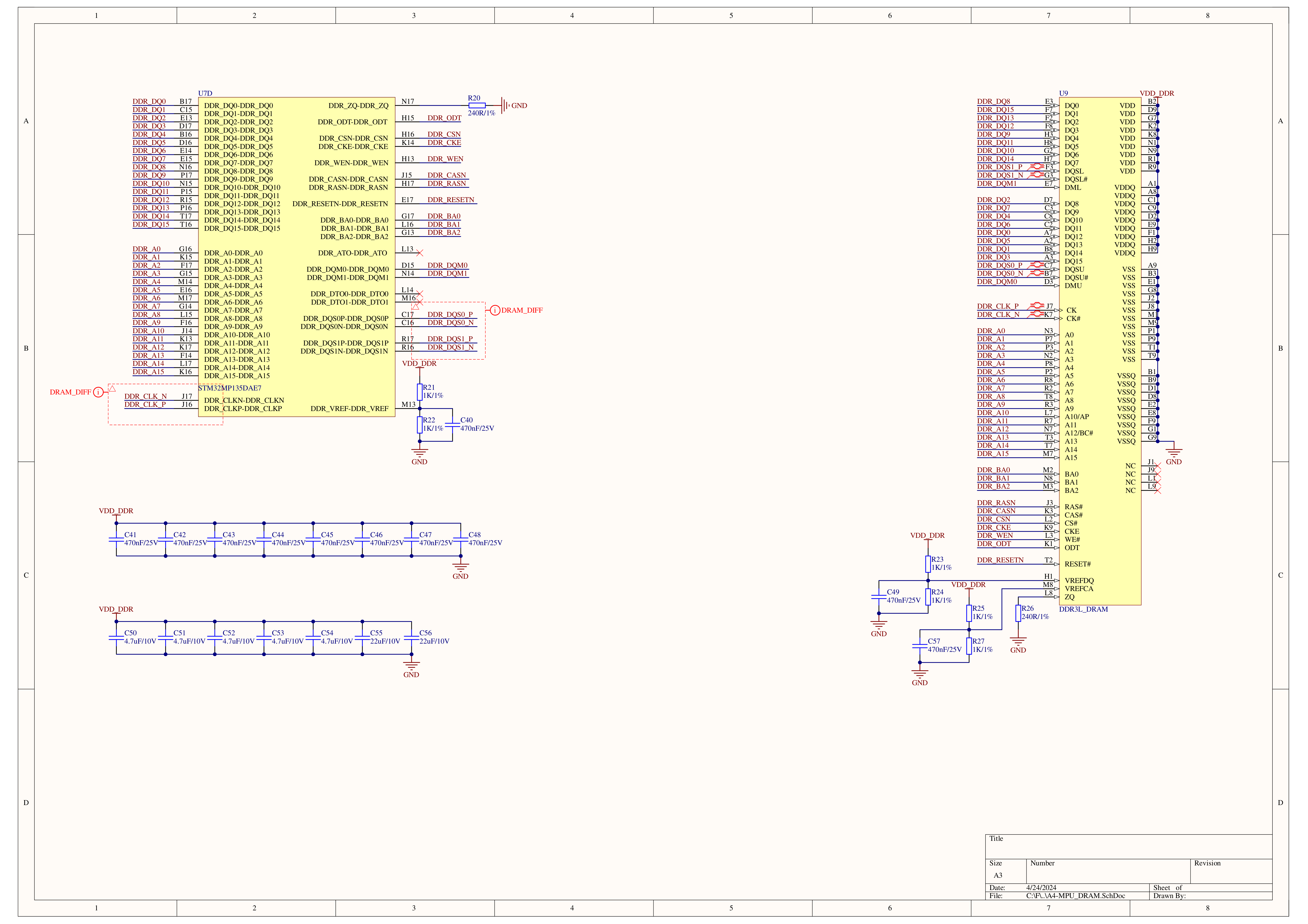
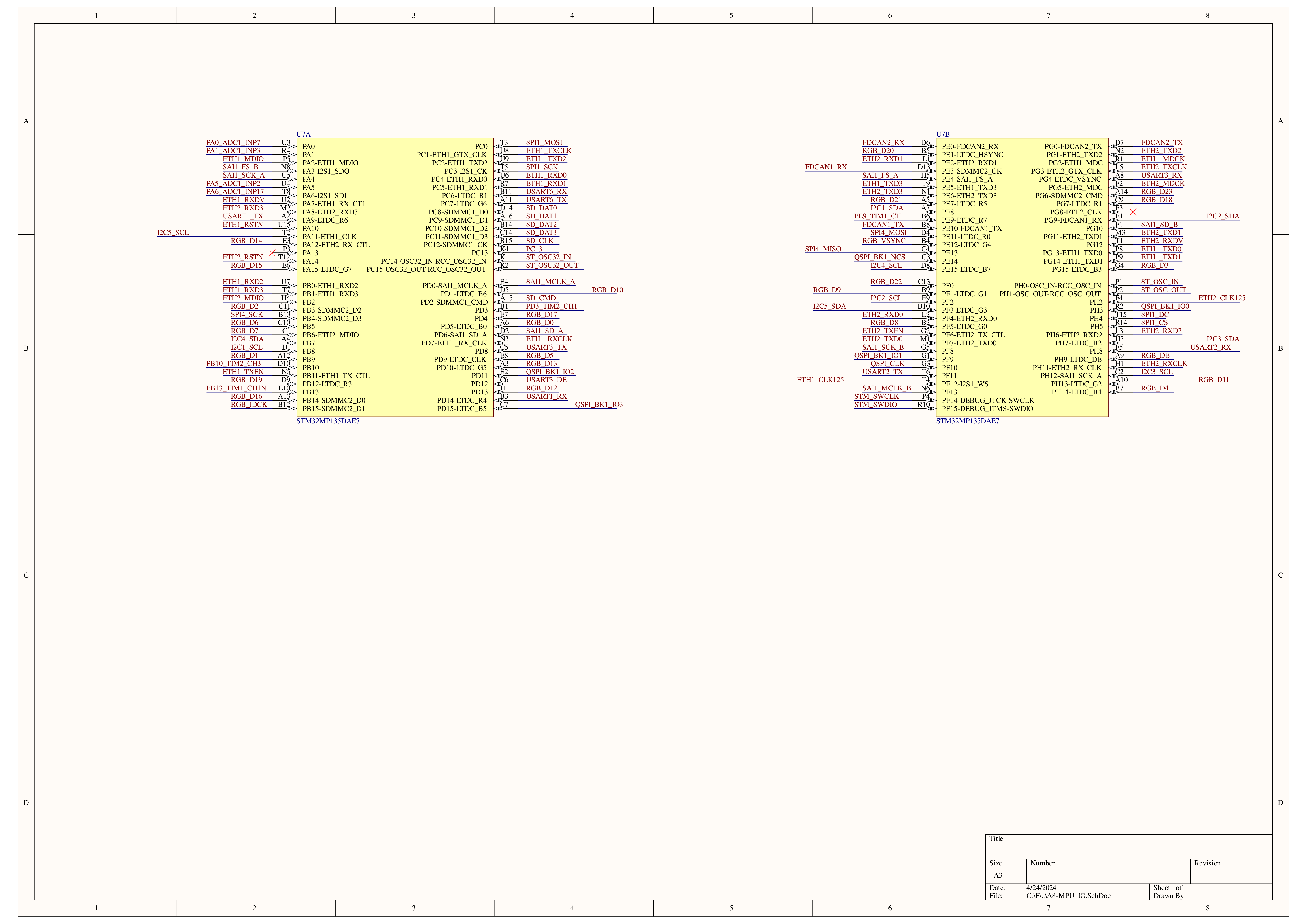
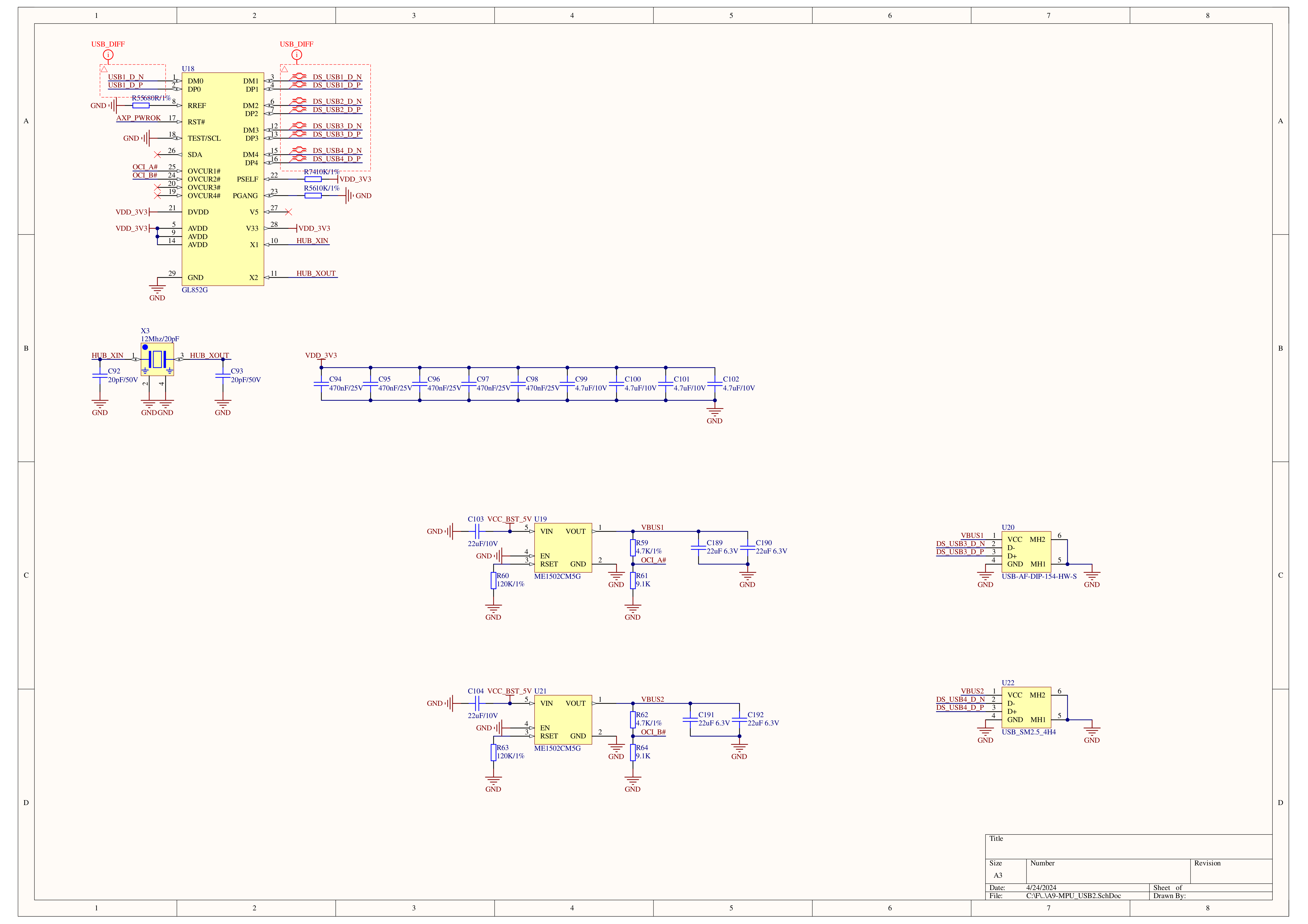
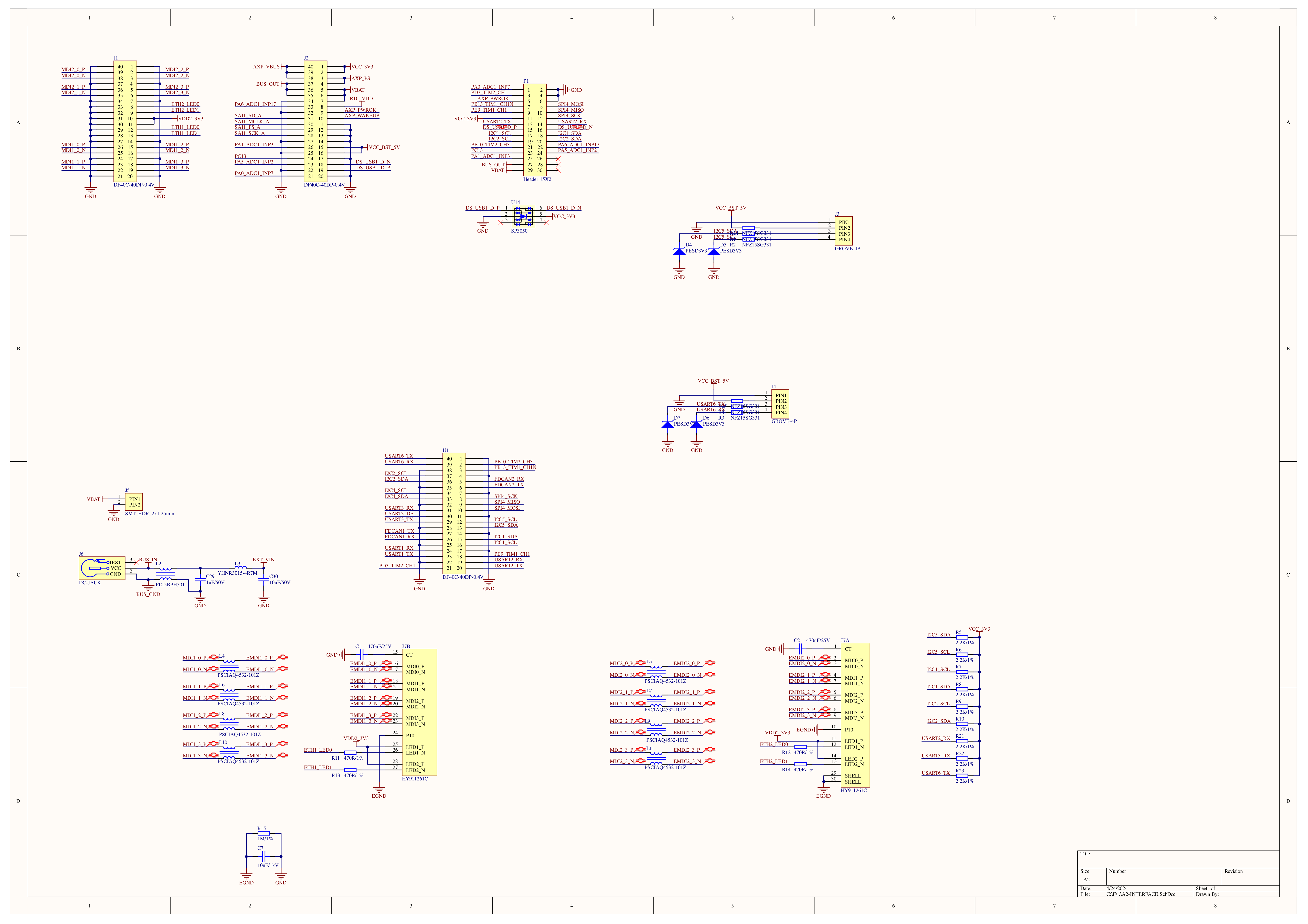
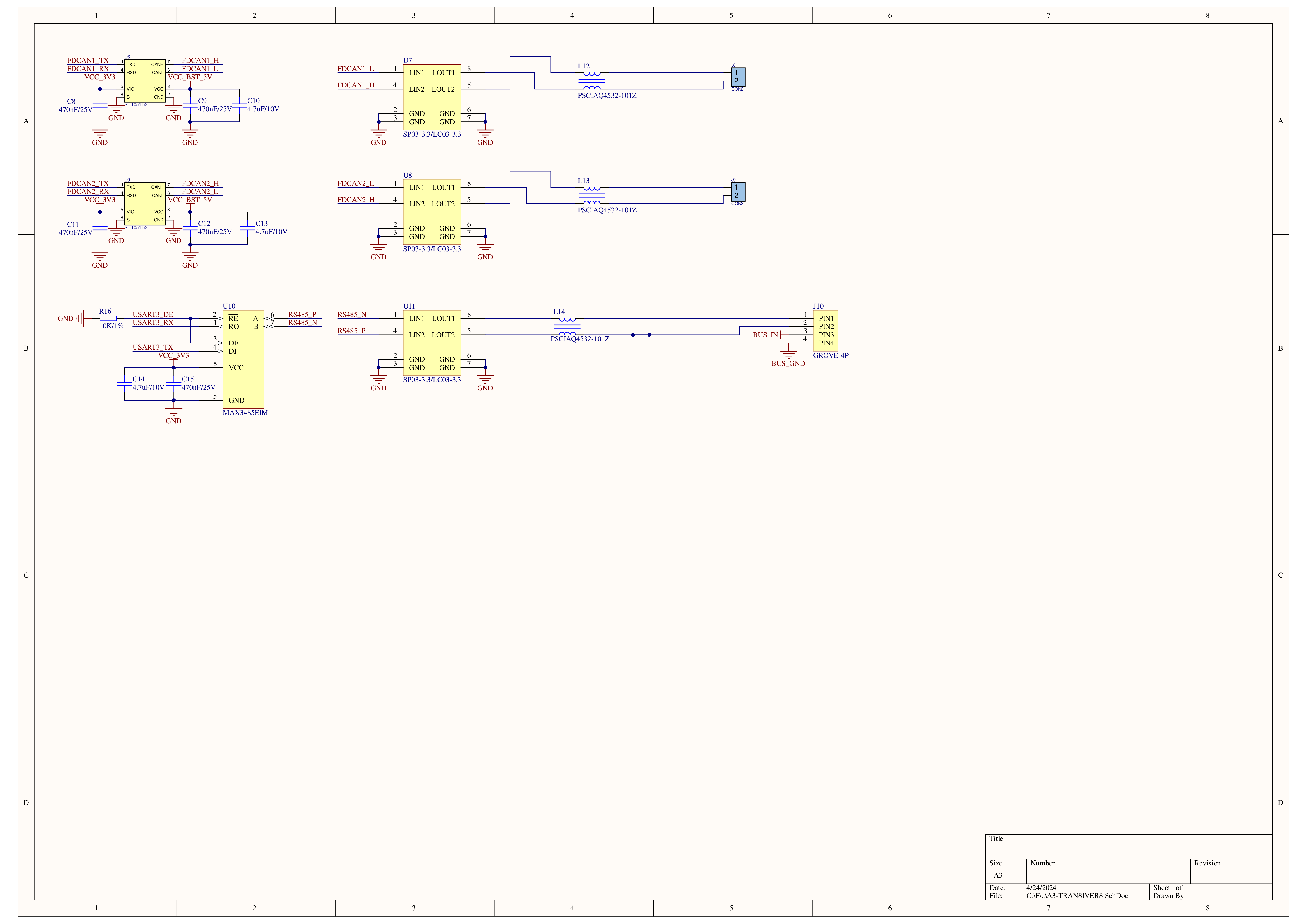
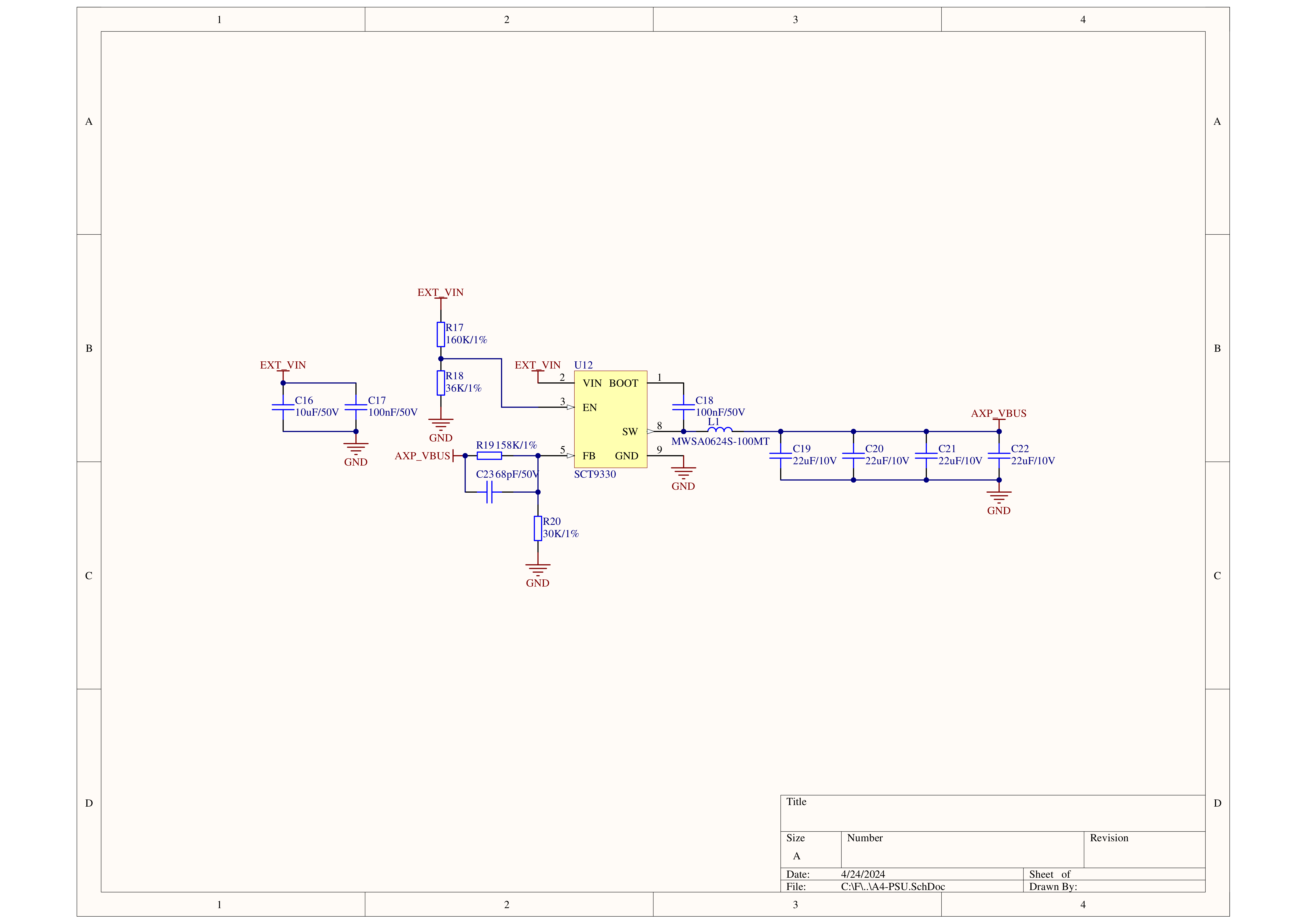
echo 131 > /sys/class/gpio/export && echo out > /sys/class/gpio/PI3/direction && echo 1 > /sys/class/gpio/PI3/value回路図
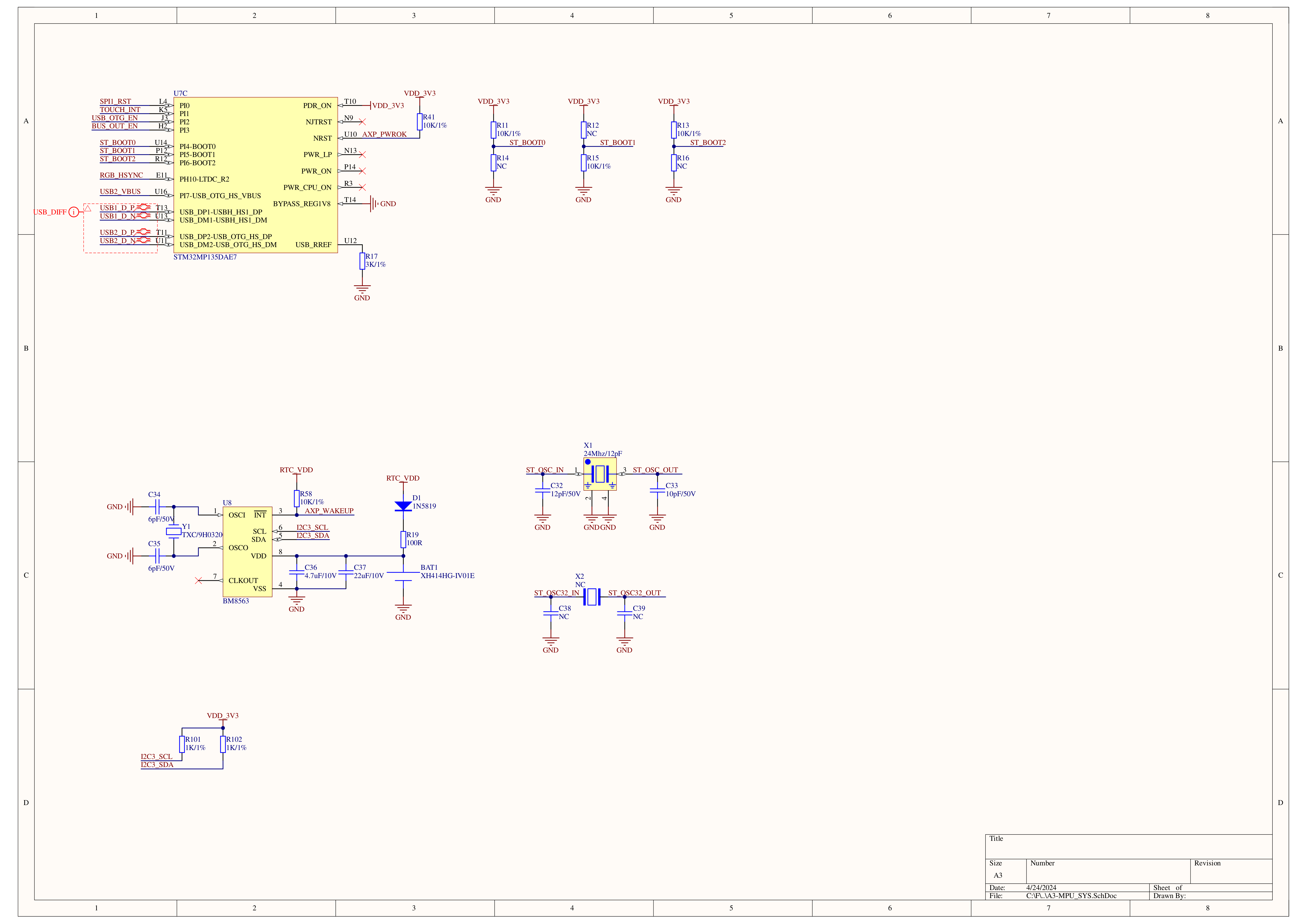

1/16
ピンマップ
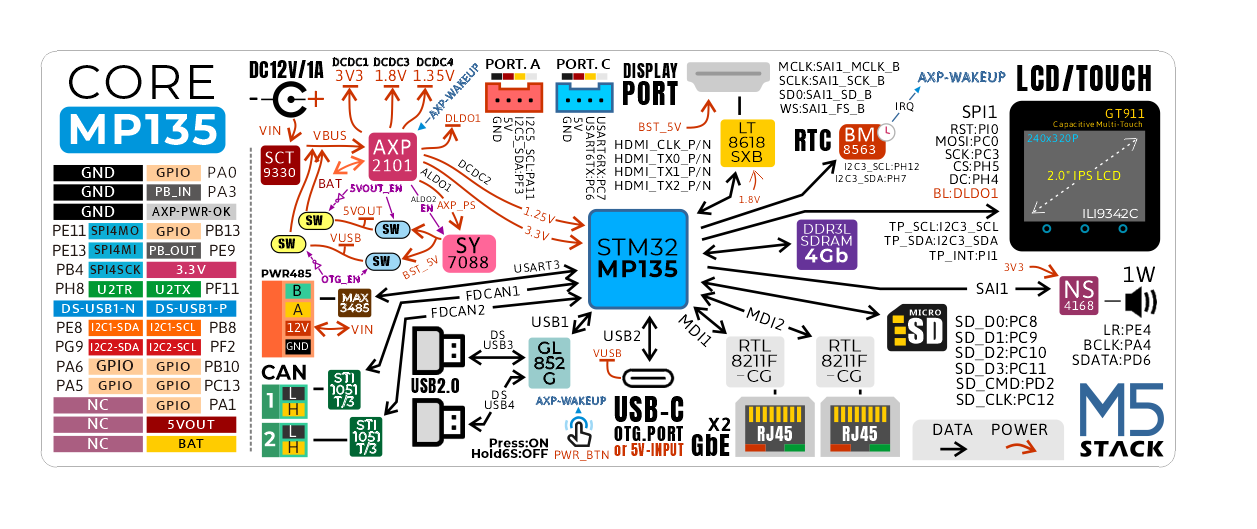
M5-Bus
| FUNC | PIN | LEFT | RIGHT | PIN | FUNC |
|---|---|---|---|---|---|
| GND | 1 | 2 | PA0 | GPIO | |
| GND | 3 | 4 | PA3 | PB_IN | |
| GND | 5 | 6 | AXP-PWR-OK | ||
| SPI4MO | PE11 | 7 | 8 | PB13 | GPIO |
| SPI4MI | PE13 | 9 | 10 | PE9 | PB_OUT |
| SPI4SCK | PB4 | 11 | 12 | 3V3 | |
| U2RX | PH8 | 13 | 14 | PF11 | U2TX |
| DS-USB1-N | 15 | 16 | DS-USB1-P | ||
| I2C1-SDA | PG8 | 17 | 18 | PB8 | I2C1-SCL |
| I2C2-SDA | PG9 | 19 | 20 | PF2 | I2C2-SCL |
| GPIO | PA6 | 21 | 22 | PB10 | GPIO |
| GPIO | PA5 | 23 | 24 | PC13 | GPIO |
| NC | 25 | 26 | PA1 | GPIO | |
| NC | 27 | 28 | 5V | ||
| NC | 29 | 30 | BAT |
| M5-Bus | STM32MP135DAE7 |
|---|---|
| U2RX | PH8 |
| U2TX | PF11 |
| I2C1-SDA | PE8 |
| I2C1-SCL | PB8 |
| I2C2-SDA | PG9 |
| I2C2-SCL | PF2 |
| デバイス名 | Linux デバイスノード |
|---|---|
| USART2 | /dev/ttySTM2 |
| I2C1 | /dev/i2c-2 |
| I2C2 | /dev/i2c-3 |
PORT.A
| PORT.A | I2C5_SCL | I2C5_SDA |
|---|---|---|
| STM32MP135DAE7 | PA11 | PF3 |
| デバイス名 | Linux デバイスノード |
|---|---|
| UI2C5 | /dev/i2c-1 |
PORT.C
| PORT.C | USART6RX | USART6TX |
|---|---|---|
| STM32MP135DAE7 | PC6 | PC7 |
| デバイス名 | Linux デバイスノード |
|---|---|
| USART6 | /dev/ttySTM0 |
RS485
| MAX3485EIM | USART3RX | USART3TX | DE/RE |
|---|---|---|---|
| STM32MP135DAE7 | PG4 | PD8 | PD12 |
| デバイス名 | Linux デバイスノード |
|---|---|
| USART3 | /dev/ttySTM3 |
CAN
| STM32MP135DAE7 | PE3 | PE10 | PG0 | PE0 |
|---|---|---|---|---|
| SIT1051T/3 (FDCAN1) | FDCAN1_TX | FDCAN1_RX | ||
| SIT1051T/3 (FDCAN2) | FDCAN2_TX | FDCAN2_RX |
ディスプレイ
| LT8618SXB | MCLK | SCLK | SD0 | WS | I2C3_SDA | I2C3_SCL |
|---|---|---|---|---|---|---|
| STM32MP135DAE7 | PF13 | PF8 | PA3 | PG10 | PH7 | PH12 |
| デバイス名 | Linux デバイスノード |
|---|---|
| I2C3 | /dev/i2c-0 |
RTC
| PORT.A | I2C3_SCL | I2C3_SDA |
|---|---|---|
| STM32MP135DAE7 | PH7 | PH12 |
| デバイス名 | Linux デバイスノード |
|---|---|
| I2C3 | /dev/i2c-0 |
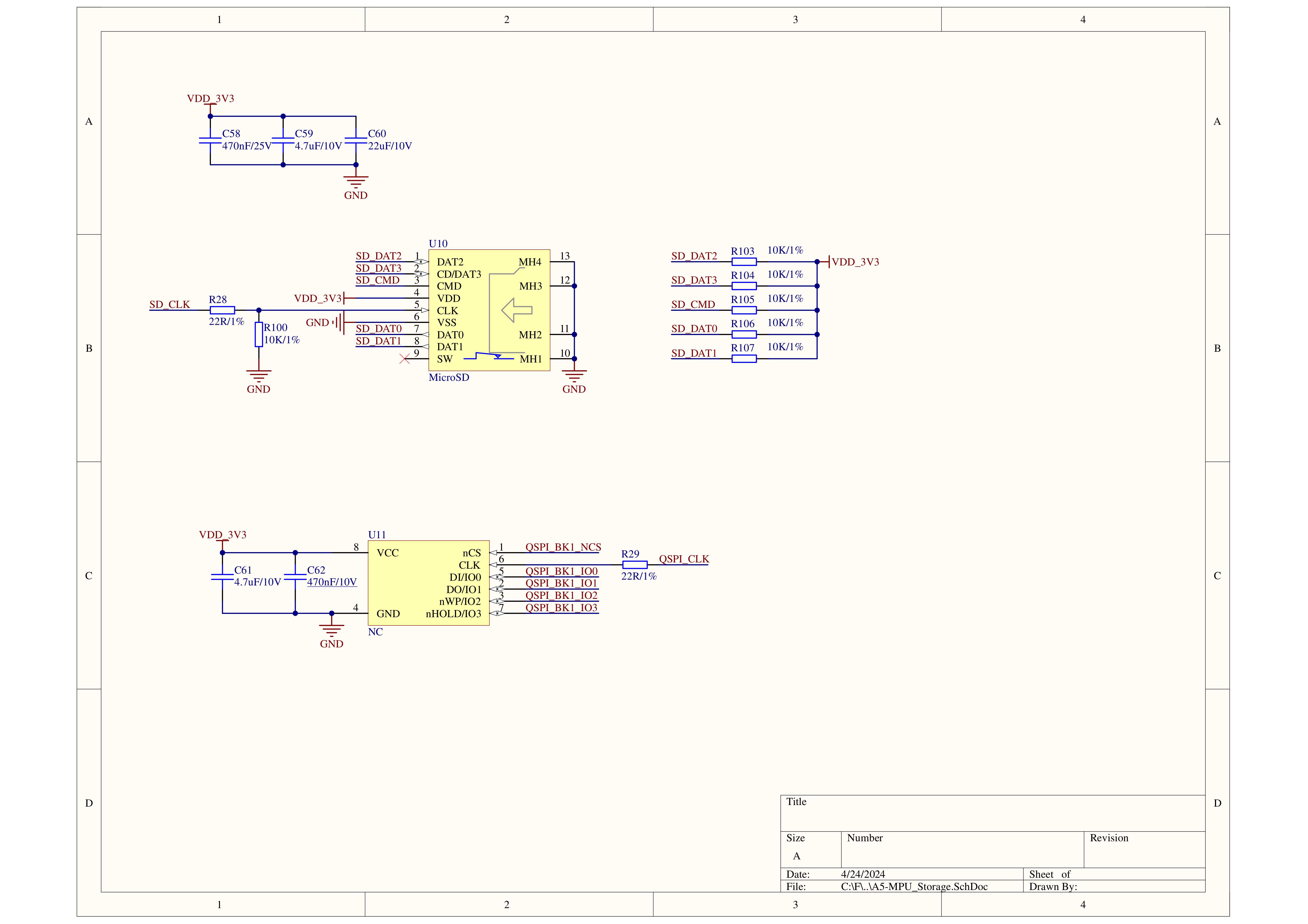
microSD
| microSD | SD_DAT0 | SD_DAT1 | SD_DAT2 | SD_DAT3 | SD_CMD | SD_CLK |
|---|---|---|---|---|---|---|
| STM32MP135DAE7 | PC8 | PC9 | PC10 | PC11 | PD2 | PC12 |
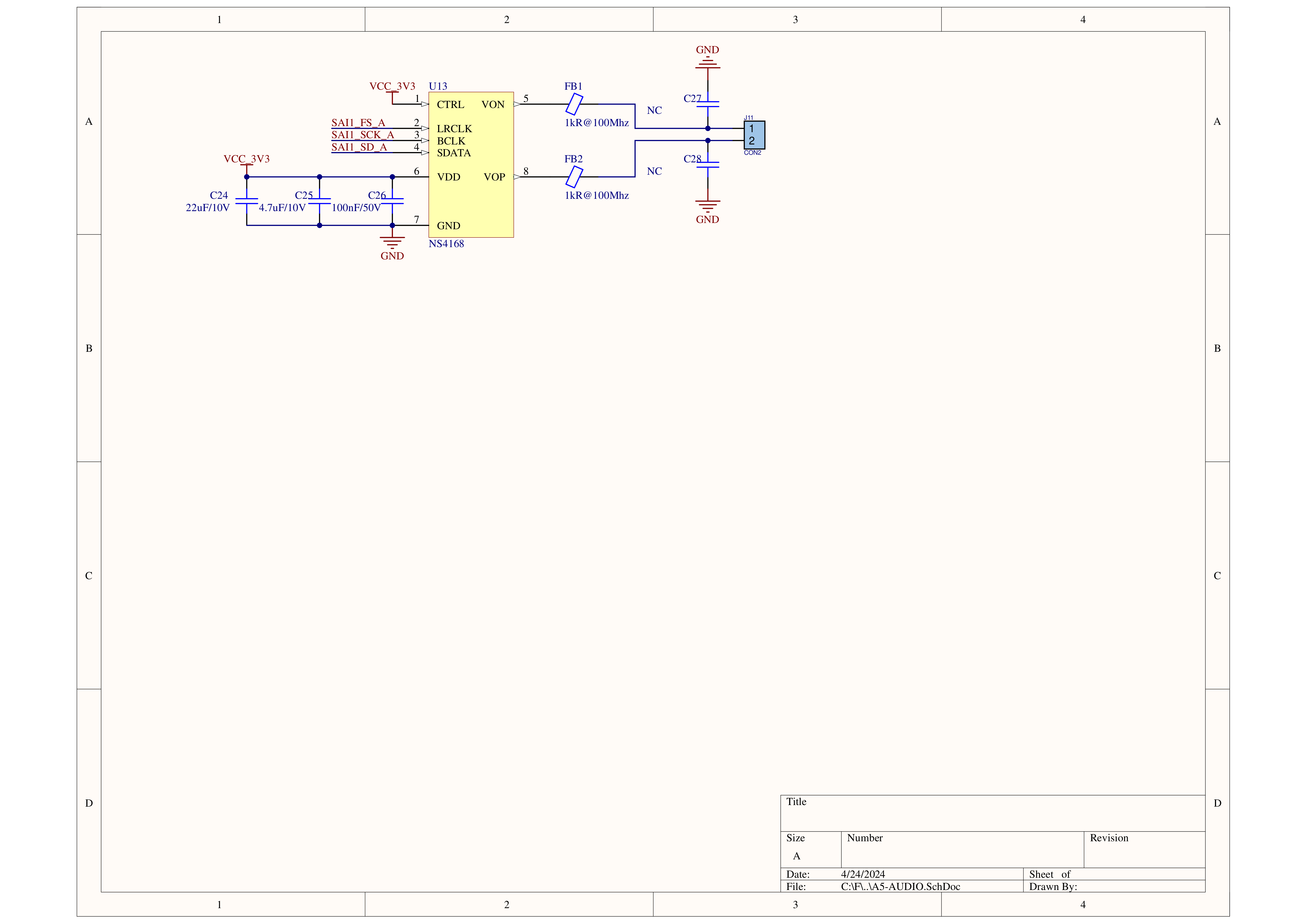
NS4168
| NS4168 | LRCLK | BCLK | SDATA | WS | I2C3_SDA | I2C3_SCL |
|---|---|---|---|---|---|---|
| STM32MP135DAE7 | PE4 | PA4 | PD6 | PG10 | PH7 | PH12 |
| デバイス名 | Linux デバイスノード |
|---|---|
| I2C3 | /dev/i2c-0 |
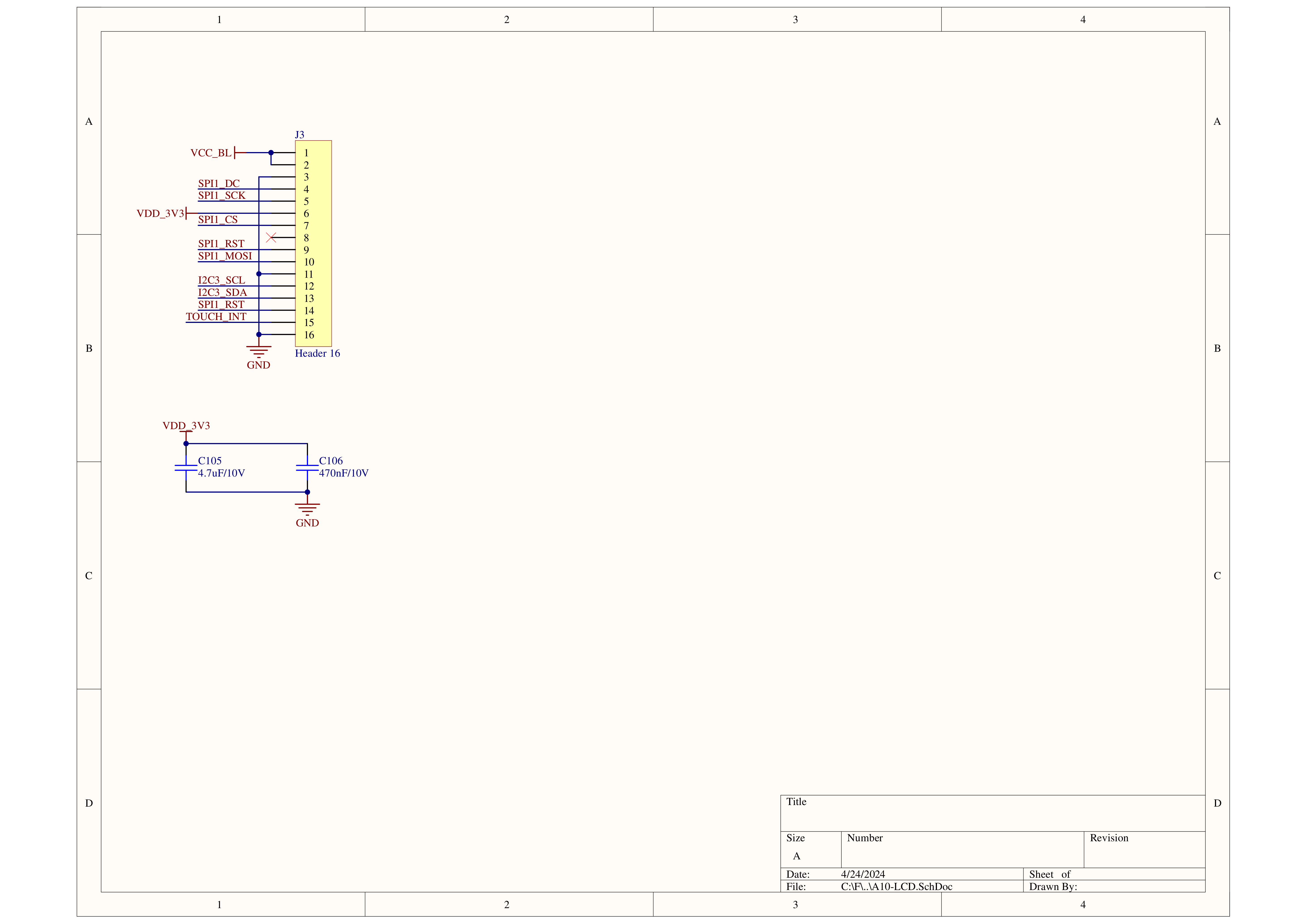
画面&タッチ
| STM32MP135DAE7 | ILI9342C | FT6336U |
|---|---|---|
| PI0 | RST | |
| PC0 | MOSI | |
| PC3 | SCK | |
| PH5 | CS | |
| PH4 | DC | |
| PH12 (I2C3_SCL) | TP_SCL | |
| PH7 (I2C3_SDA) | TP_SDA |
| AX2101 | DLDO1 |
|---|---|
| ILI9342C | BL |
| デバイス名 | Linux デバイスノード |
|---|---|
| I2C3 | /dev/i2c-0 |
製品サイズ
構造
データシート
- STM32MP135DAF7
- GL852G(USB Hub Chip)
- LT8618SXB
- RTL8211F(Ethernet chip)
- FT6336U(Touch Screen Driver)
- NS4168(amplifier chip)
- BM8563(Clock Chip)
- AXP2101(PMU)
- SIT1051T/3(CAM Comunication)
- ILI9342C(Screen Driver)
ソフトウェア
クイックスタート
- CoreMP135 イメージ書き込みとソフトウェア更新
- CoreMP135 アプリケーション開発フレームワーク
- CoreMP135 ルートファイルシステム拡張
- CoreMP135 ネットワーク設定
- CoreMP135 Buildroot ビルド
- CoreMP135 デバイスツリーオーバーレイ
UiFlow2
SDK
Buildroot
Buildroot はシンプルで高効率、使いやすい組込みビルドツールであり、本リポジトリは STM32MP1 プラットフォームをサポートするための Buildroot BR2_EXTERNAL ツリーです。
書き込みイメージ
| Version | カーネルバージョン | ダウンロードリンク |
|---|---|---|
| M5_CoreMP135_buildroot_20240515 | 5.15.118 | Download |
| M5_CoreMP135_buildroot_20240628 | 5.15.118 | Download |
| M5_CoreMP135_debian12_20240515 | 5.15.118 | Download |
| M5_CoreMP135_debian12_20240628 | 5.15.118 | Download |
| M5_CoreMP135_debian12_20240919 | 5.15.118 | Download |
動画
- CoreMP135 の紹介
- CoreMP135 の画像書き込み
- M5Stack Linux アプリケーション開発フレームワークに基づいて、CoreMP135 の周辺ハードウェアをプログラムし、制御する
- CoreMP135 UIFlow2 Quick Start
Page Tools