























Bala
SKU:K014





説明
Bala はバランスカーアプリケーションです。本製品は M5 FIRE とデュアル DC モーターベースを組み合わせたセルフバランスロボットであり、その名称「BALA」は "Balance" の略語から由来しています。デフォルトでバランスカーアプリケーションがプリインストールされており、動作時にはクローズドループアルゴリズムを用いて垂直バランスを維持します。加速度計とジャイロスコープの姿勢データを使用して、その方向と位置を補正します。
特徴
- 2 チャンネル DC ドライバーモジュール
- I2C 通信:0x56
- LEGO 互換
- POGO ピン
- microSD 拡張対応
含まれるもの
- 1 x Bala
- 1 x モータードライバ
- 2 x N20 モーター(エンコーダー内蔵)
- 1 x Type-C USB
仕様
| 仕様 | パラメータ |
|---|---|
| ESP32 | 240MHz デュアルコア,600 DMIPS, 520KB SRAM, Wi-Fi |
| Flash | 16MB Flash + 4MB PSRAM |
| 入力 | 5V @ 500mA |
| インターフェース | Type-C x 1, GROVE (I2C+I/O+UART), Pogo Pin x 1 |
| LCD | 2 インチ,320x240 カラー TFT LCD, ILI9341 |
| スピーカー | 1W-0928 |
| マイク | MEMS アナログ BSE3729 マイク |
| LED | SK6812 3535 RGB LED x 10 |
| MEMS | BMM150+(MPU6886/SH200Q) |
| バッテリー | 内蔵 550mAh @ 3.7V |
| 動作温度 | 32°F ~ 104°F ( 0°C ~ 40°C ) |
| コントローラーサイズ | 54 x 54 x 21 mm |
| ケース | プラスチック(PC) |
| 製品重量 | 130g |
| 梱包重量 | 247g |
| 製品サイズ | 90 x 54 x 61mm |
| 梱包サイズ | 185 x 108 x 81mm |
操作説明
BMM150 磁場干渉
磁石を含む製品は、BMM150 磁場センサーに干渉を与えて異常な値を測定する可能性があります。磁石を含む M5 コントローラーと組み合わせる場合は、磁石を取り外し、BMM150 センサーを強い磁場の近くに置かないようにしてください。
センサー校正
注意:初めて使用する際は必ず校正を行ってください!右端の C ボタンを押しながら電源を入れ、「ピッ」という音が聞こえたらボタンを離します。センサーは校正モードに入り、コントローラーを水平で静止した状態に保ちます。3 秒後にセンサーの校正が完了し、校正後は自動でバランスモードに入ります。使用中に BALA がバランスを維持できない場合は、センサーの再校正を試みてください。
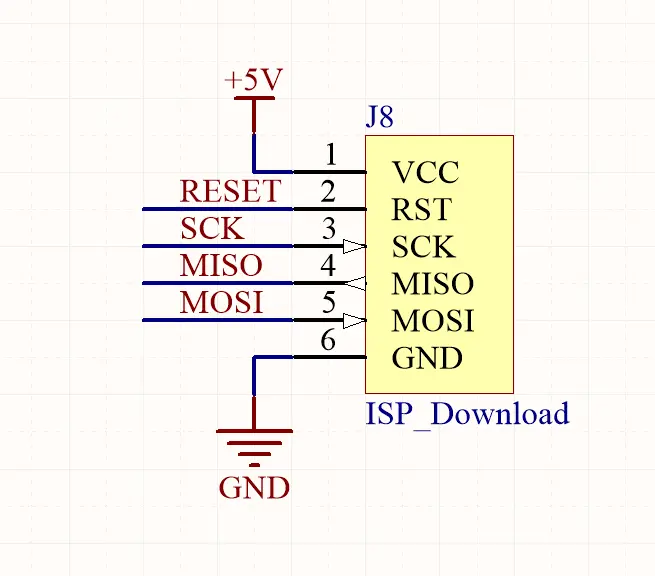
ピンマップ
Mega328 ISP書き込みインターフェース ピン定義
ソフトウェア
Arduino
Easyloader
| Easyloader | ダウンロードリンク | 備考 |
|---|---|---|
| Bala テストファームウェア MPU6050 バージョン Easyloader | download | / |
| Bala テストファームウェア MPU6886 バージョン Easyloader | download | / |
動画
BALA のデモ
BALA のデモ - スマホ操作
BALA のデモ - ライントレース
BALA のデモ - スマホでライントレース