
LidarBot
SKU:K017-C





説明
LidarBot は 360° レーザーレーダーセンサー、M5Core コントローラー、4 つのメカナムホイール、ホイール制御基板(MEGA328 搭載)、RGB ライトバー、ジョイスティックコントローラーなどのハードウェアを備えたレーザーレーダーカーです。さらに、黒白トラックを認識する TRACE ライン追従モジュールキットが付属しています。メカナムホイール技術を基盤とした全方位移動車は、前進、横移動、斜め移動、回転およびそれらの組み合わせといった運動を実現できます。大容量リチウムバッテリーを搭載し、長時間の稼働を可能にします。
コントローラーと LidarBot は ESP-NOW によってリアルタイム通信を行い、動作中にはコントローラー画面でレーザーレーダーセンサーがスキャンしたマップデータを確認できます。Github 上にオープンソースコードがあり、公式コードを修正することで、レーダースキャン等の取得データを Wi-Fi やその他の方法で他のノードに送信できます。LidarBot は STEM 教育分野でのプログラミング学習や競技活動に利用できるだけでなく、AGV 開発分野の開発者によるプロジェクト開発にも適しています。
特徴
- EAI YDLIDAR X2 レーザーレーダー測距速度: 8m @ 7Hz
- ESP-NOW リモートコントロール
- ライントレース機能搭載
- 開発プラットフォーム
- Arduino
- UiFlow
- LEGO 互換
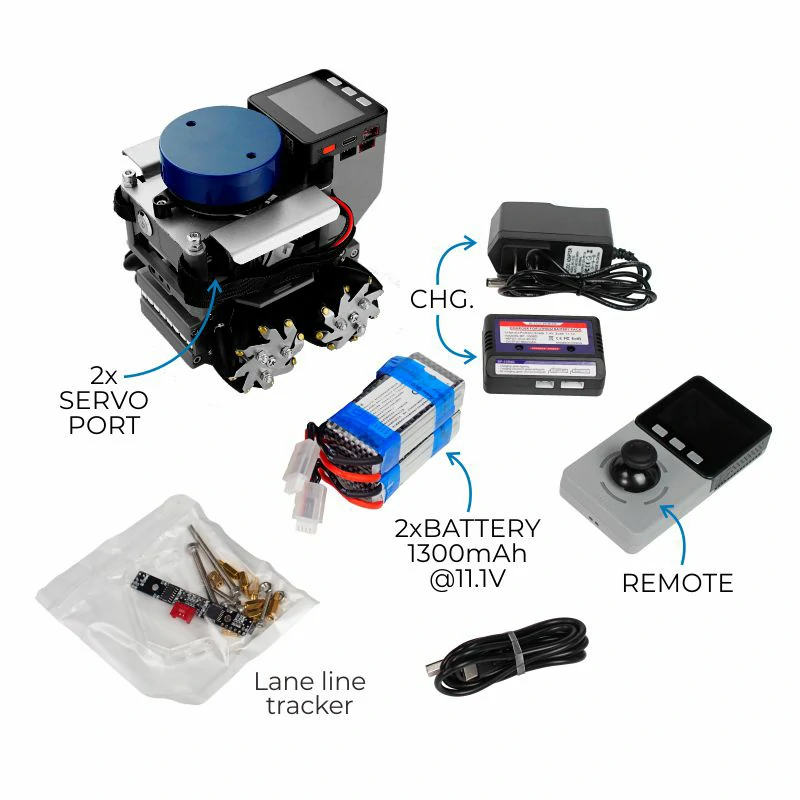
含まれるもの
- 1 x LidarBot
- 1 x リモートコントローラハンドル
- 1 x ライントレースモジュールキット
- 2 x バッテリー(1300mAh @ 11.1V)
- 1 x バッテリー充電器
- 1 x Type-C USB
アプリケーション
- 屋内ナビゲーション
- 自律迷路走行
- 経路計画
- 自動運転
仕様
| 仕様 | パラメータ |
|---|---|
| MCU | STM32F030F4P6 |
| 製品サイズ | 142.0 x 117.0 x 120.0mm |
| 製品重量 | 1980.0g |
| 梱包サイズ | 208.0 x 208.0 x 167.0mm |
| 梱包重量 | 2140.0g |
操作説明
接続とペアリング
未接続または片方のみが接続されている場合、表示や制御に問題が発生する可能性があります。その場合は再接続が必要です。
- レーダーカーで C キーを押しながら M5Core の電源ボタンを押し、画面が再起動し終わったら C キーを離すとブロードキャストモードに入ります。すべてのスレーブ機器はマスターからの信号を受け取ります。
- レーダーカーがブロードキャストモードの状態で、ハンドルの C キーを押しながらハンドルの電源ボタンを押し、ハンドルが再起動したら C キーを離します。すると画面上に現在ブロードキャスト中のマスターが表示されます。A/C キーで上下に選択し、B キーで接続したいマスターの Mac アドレスを決定します。Mac アドレスはスマートフォンや PC で近くの Wi-Fi を確認し、「lidar」から始まる SSID の後ろに続く文字列です。
- マスターを確認後、マスター(レーダーカー)の画面はスレーブからの確認信号を受け取り、ABC キーでスレーブ(ハンドル)のアドレスを選択・決定します。B キーで確定すると、レーダーカーとハンドルの通信設定が完了し、双方向のメッセージ送受信によるレーダー表示およびハンドル操作が可能になります。
制御と表示
レーダーカーとハンドルがペアリングされている場合、ESP-NOW によって両者がメッセージをやり取りできます。レーダー情報はハンドルに表示され、ハンドルから車体を制御できます。
- 通常制御モード:ジョイスティックを動かすと、前進、後退、旋回が可能になります。
- 全方向制御モード:A キー(ハンドル画面の左ボタン)を押しながらジョイスティックを動かすと左右への横移動が可能ですが、前後方向が逆になります。
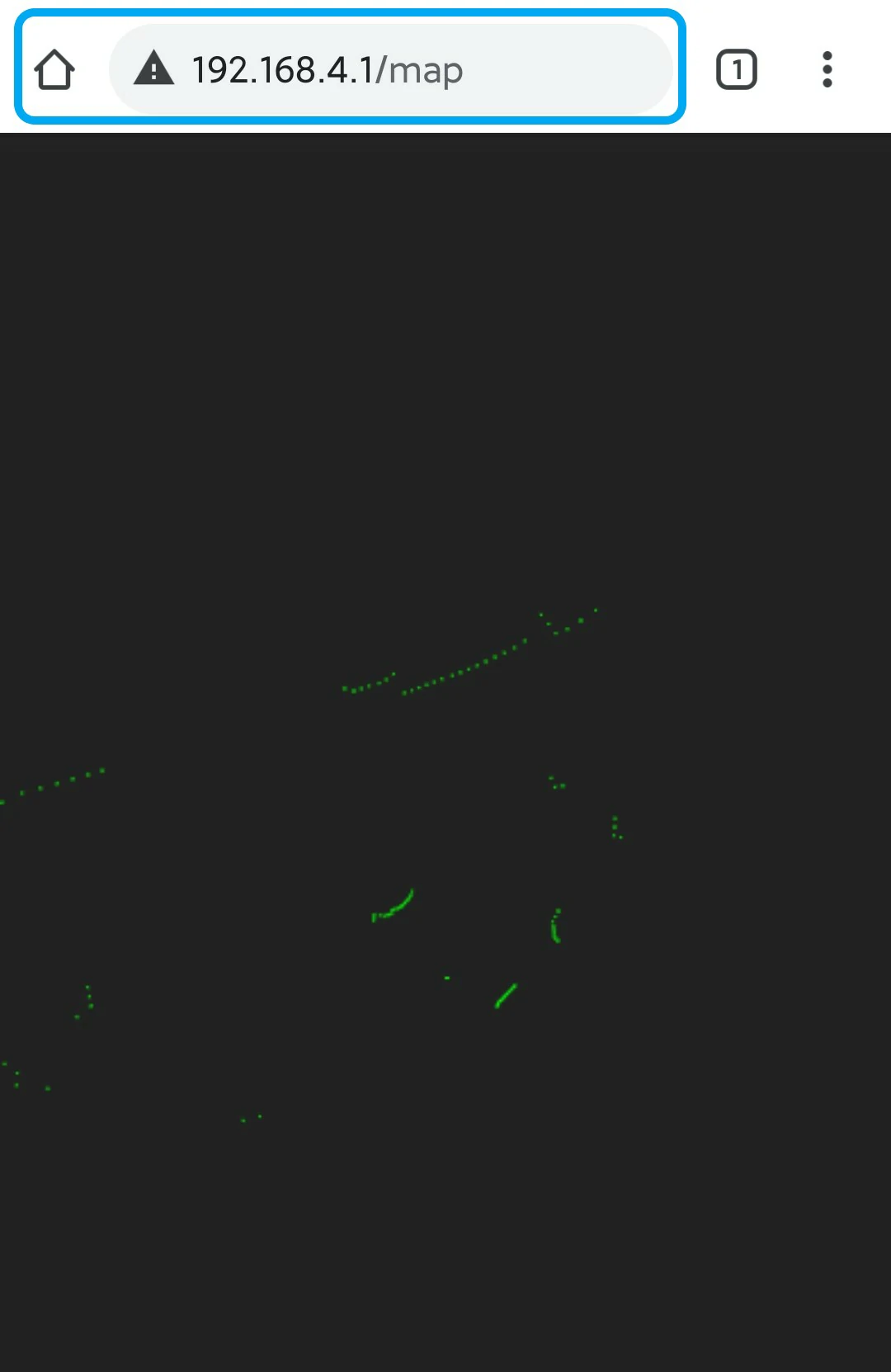
ウェブでのレーダー画像表示
レーダーカーが起動した後、ハンドルとのペアリングなしで、レーダーカーの Wi-Fi ホットスポット(SSID:X2Lidar:xx:xx:xx, PWD:12345678)に接続します。その後、スマートフォンや PC のブラウザで 192.168.4.1/map にアクセスすると、レーダー画像情報を確認できます。
データシート
ソフトウェア
Arduino
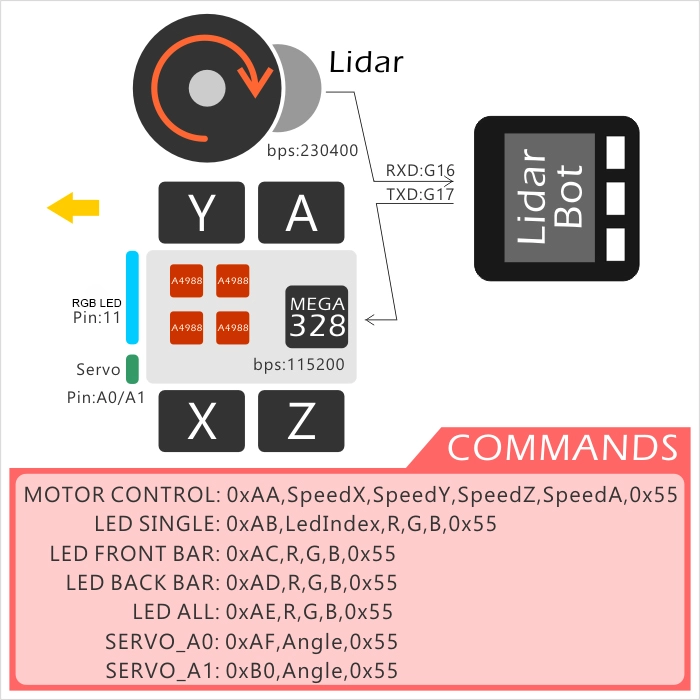
通信プロトコル
主制御と基板間のプロトコル
プロトコル形式:フレームヘッダー(コマンドタイプ) + データフレーム + フレームエンド
| プロトコル対象 | プロトコル形式 | 例 | 呼び出し関数 |
|---|---|---|---|
| Wheels | 0xAA,SpeedX (-7 ~ 7),SpeedY,SpeedZ,SpeedA,0x55 | 0xAA, 5, 5, 5, 5, 0x55 (前進、速度: 5) | ControlWheel (5, 5, 5) |
| One RGB | 0xAB,LedIndex,R (0 ~ 254),G,B,0x55 | 0xAB, 3, 20, 50, 100, 0x55 (3 番 LED を指定色で点灯) | setLedColor (3, 20, 50, 100) |
| Front RGB Bar | 0xAC,R (0 ~ 254),G,B,0x55 | 0xAC, 20, 50, 100, 0x55 (前方ライトバーを指定色で点灯) | setFrontLedBar (20, 50, 100) |
| Back RGB Bar | 0xAD,R (0 ~ 254),G,B,0x55 | 0xAD, 20, 50, 100, 0x55 (後方ライトバーを指定色で点灯) | setBackLedBar (20, 50, 100) |
| All RGB | 0xAE,R (0 ~ 254),G,B,0x55 | 0xAE, 20, 50, 100, 0x55 (全ライトバーを指定色で点灯) | setLedAll (20, 50, 100) |
| ServoMotor0 | 0xAF,Angle (0 ~ 180),0x55 | 0xAF, 100, 0x55 (サーボモーター 0 を 100° に回転) | setServo0Angle (100) |
| ServoMotor1 | 0xB0,Angle (0 ~ 180),0x55 | 0xB0, 100, 0x55 (サーボモーター 1 を 100° に回転) | setServo1Angle (100) |
パラメータ
- 通信パラメータ
- M5Core(車両主制御) <-> レーザーレーダー U1RXD(GPIO16) <-> レーザーレーダー シリアル設定: "115200bps, 8, n, 1"(8 ビットデータ、パリティなし、1 ストップビット)
- M5Core(車両主制御) <-> 制御基板 U2TXD(GPIO17) <-> 制御基板 シリアル設定: "115200bps, 8, n, 1"(8 ビットデータ、パリティなし、1 ストップビット)
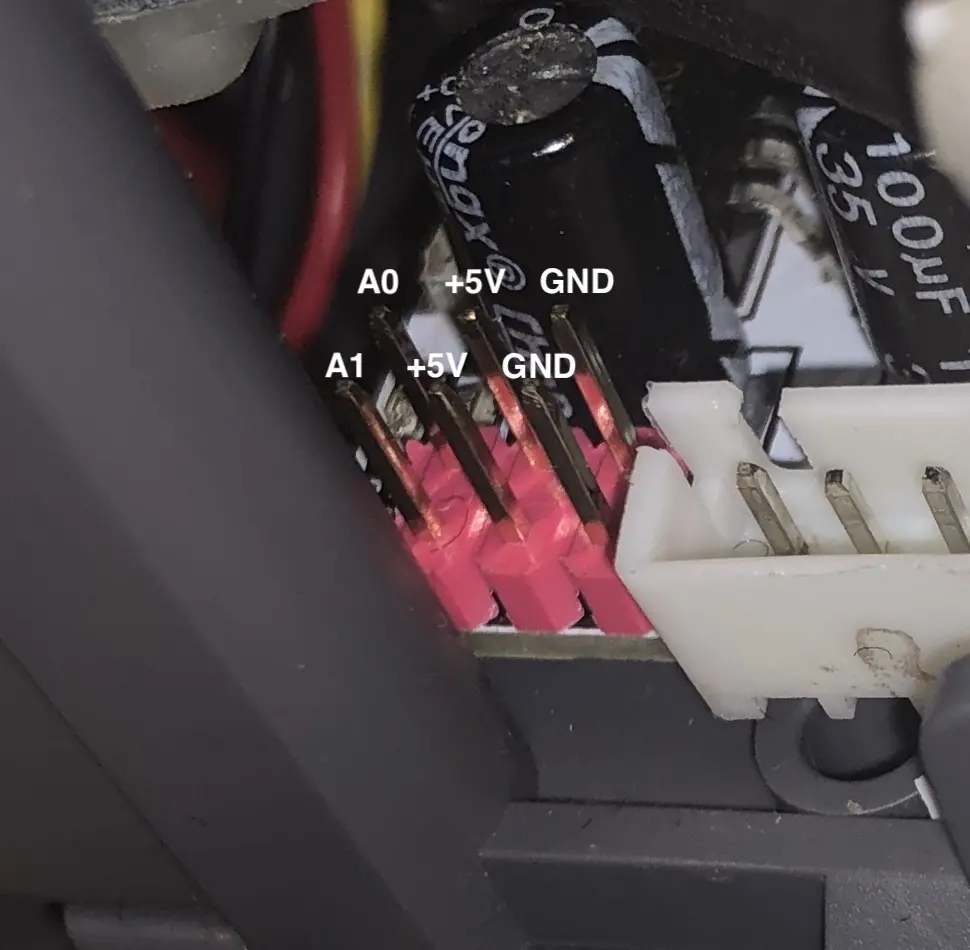
- インターフェース
- サーボモーター 0 <-> A0(MEGA328)
- サーボモーター 1 <-> A1(MEGA328)
- RGB LED <-> 11(MEGA328)
Easyloader
| Easyloader | ダウンロードリンク | 備考 |
|---|---|---|
| LidarBot Master Firmware Easyloader | download | / |
| LidarBot Remote Firmware Easyloader | download | / |
動画
- LidarBOT 事例
更新履歴
| 発売日 | 製品変更 | 備考 |
|---|---|---|
| 2019.7 | LiDAR モデルに EAI YDLIDAR X2 を採用し、板金構造部品 SKU: K017 -> K017-C を追加 | LiDAR 測距速度 8m @ 6Hz -> 8m @ 7Hz |
| 2018.12 | 初回発売 | / |