
Base X
SKU:K037






説明
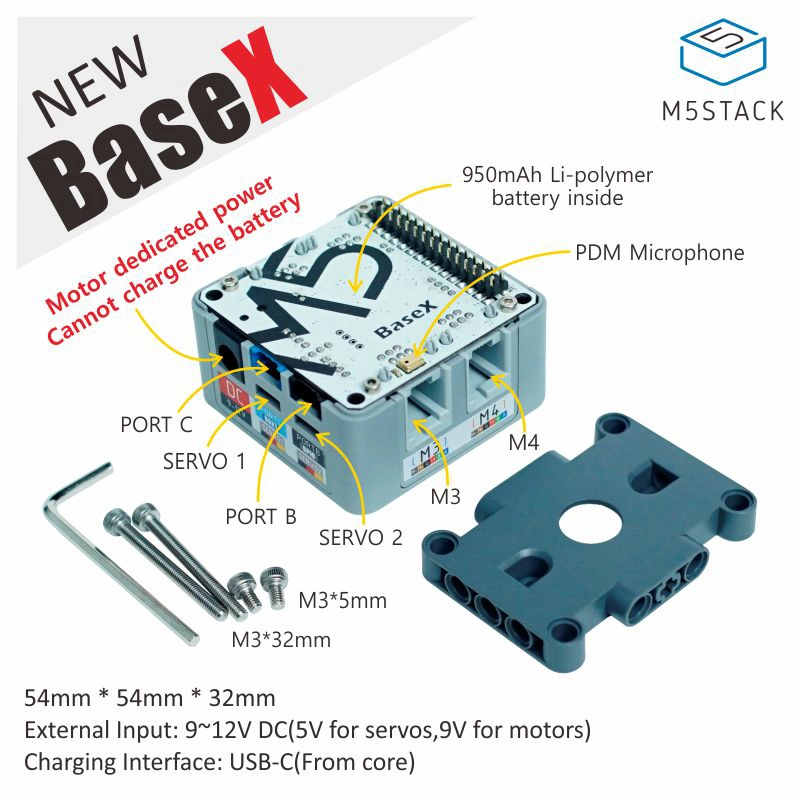
Base X は、レゴ EV3 モーターと互換性のある専用ベースで、構造設計は BASE26 に類似しており、複数の固定方法に対応しています。さらにレゴ接続ベースが付属しているため、レゴ構造を組み立てる際に Base X を簡単に作品に組み込むことができます。Base X は最大 4 系統(RJ11)のレゴモーターを同時に接続でき、角度や速度の読み取りと制御が可能で、オリジナルのモーター機能と完全互換です。
またベースには 2 系統のサーボモーターインターフェースがあり、サーボの回転角度を直接制御できます。内蔵の PDM マイクにより音声収集も可能です。さまざまな使用シーンに対応するため、UART インターフェース(16/17)と GPIO インターフェース(26/36)が用意されており、各種センサーの接続がより柔軟になります。ベースには 950mAh のバッテリーが内蔵されており、M5Core の USB Type-C ポートから充電でき、稼働時間を延長できます。さらにインターフェースの駆動能力を向上させるため、DC 電源ジャックを備えており、外部の 9〜12V DC 電源からモーター駆動専用電源を供給可能です(ベース経由での充電は不可)。
特徴
- 4 系統 RJ12 レゴモーターインターフェース(ベース合計最大電流出力 2A)
- 2 系統サーボ駆動(ベース合計最大電流出力 2A)
- 1 系統 UART
- 1 系統 GPIO
- 内蔵 PDM マイク(G34)
- オンボード DC-DC コンバータ(9〜12V 入力、モーター専用電源)
- 内蔵 950mAh バッテリー
- 多様な固定方法/レゴホール接続対応
アプリケーション
- レゴエンコードモーター/サーボコントローラ
- レゴトイ DIY スマートコントロール
含まれるもの
- 1 x Base X
- 1 x レゴ ベース
- 2 x M3 * 5mm 304 ステンレス六角穴付きボルト
- 2 x M3 * 32mm 304 ステンレス六角穴付きボルト
- 1 x 六角レンチ L 型 2.5mm (M3 ネジ用)
仕様
| 仕様 | パラメータ |
|---|---|
| MCU | STM32F030C8T6 |
| 通信インターフェース | I2C 通信 @ 0x22 |
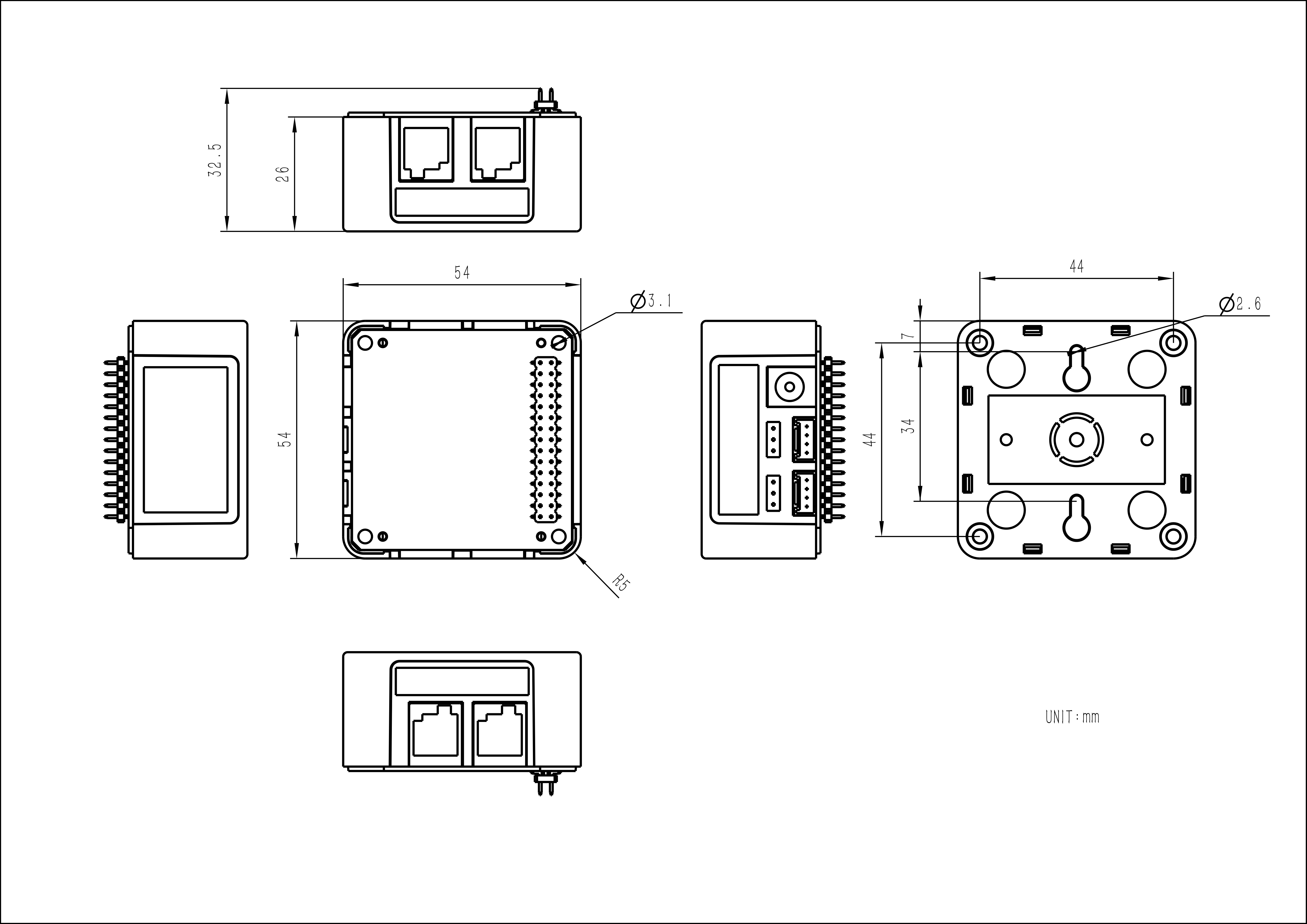
| 製品サイズ | 54.0 x 54.0 x 26.0mm |
| 製品重量 | 59.0g |
| 梱包サイズ | 150.0 x 65.0 x 40.0mm |
| 梱包重量 | 110.0g |
ピンマップ
M5-Bus
スイッチ
下部の M5-Bus で
SW と表記されたピンは、ディップスイッチで切り替えが可能で、異なる主制御デバイスに対応します。| PIN | LEFT | RIGHT | PIN |
|---|---|---|---|
| GND | 1 | 2 | NC |
| GND | 3 | 4 | PORT.B |
| GND | 5 | 6 | NC |
| NC | 7 | 8 | NC |
| NC | 9 | 10 | PORT.B |
| NC | 11 | 12 | 3V3 |
| NC | 13 | 14 | NC |
| PORT.C | 15 | 16 | PORT.C |
| I2C_SDA | 17 | 18 | I2C_SCL |
| NC | 19 | 20 | NC |
| NC | 21 | 22 | NC |
| NC | 23 | 24 | I2S_LRCK (SW) |
| HPWR | 25 | 26 | I2S_DIN (SW) |
| HPWR | 27 | 28 | 5V |
| HPWR | 29 | 30 | BAT |
製品サイズ
構造
ソフトウェア開発
Arduino
UiFlow1
通信プロトコル
I2C 制御説明
- I2C スレーブアドレス: 0x22
| 機能 | レジスタアドレス | 値 |
|---|---|---|
| SERVO1_ANGLE_ADDR | 0X00 | 0~180 |
| SERVO2_ANGLE_ADDR | 0x01 | 0~180 |
| SERVO1_PULSE_ADDR | 0x10 | (uint16_t) 500~2500 |
| SERVO2_PULSE_ADDR | 0x12 | (uint16_t) 500~2500 |
| MOTOR1_PWM_DUTY_ADDR | 0x20 | -127~127 |
| MOTOR2_PWM_DUTY_ADDR | 0x21 | -127~127 |
| MOTOR3_PWM_DUTY_ADDR | 0x22 | -127~127 |
| MOTOR4_PWM_DUTY_ADDR | 0x23 | -127~127 |
| MOTOR1_ENCODER_ADDR | 0x30 | int32_t |
| MOTOR2_ENCODER_ADDR | 0x34 | int32_t |
| MOTOR3_ENCODER_ADDR | 0x38 | int32_t |
| MOTOR4_ENCODER_ADDR | 0x3C | int32_t |
| MOTOR1_SPEED_ADDR | 0x40 | -127~127 |
| MOTOR2_SPEED_ADDR | 0x41 | -127~127 |
| MOTOR3_SPEED_ADDR | 0x42 | -127~127 |
| MOTOR4_SPEED_ADDR | 0x43 | -127~127 |
I2C モーターアドレス:
| モーター番号 | モーターアドレス |
|---|---|
| MOTOR1 | 0x50 |
| MOTOR2 | 0x60 |
| MOTOR3 | 0x70 |
| MOTOR4 | 0x80 |
設定方法
モーターアドレス + nBit
| ビット | 値 |
|---|---|
| 0 | モーター動作モード |
| 1 | position-p (3) |
| 2 | position-i (1) |
| 3 | position-d (15) |
| 4/5/6/7 | position-point (下位ビット有効) |
| 8 | position-max-speed |
| 9 | speed-p |
| 10 | speed-i |
| 11 | speed-d |
| 12 | speed-point |
| モーター動作モード | 値 |
|---|---|
| Normal | 0X00 |
| Position | 0x01 |
| Encoder | 0x02 |
| 3 | position |
EasyLoader
| Easyloader | Download | Note |
|---|---|---|
| Base X Test Easyloader | download | / |
動画
Page Tools