
RoverC
SKU:K036








説明
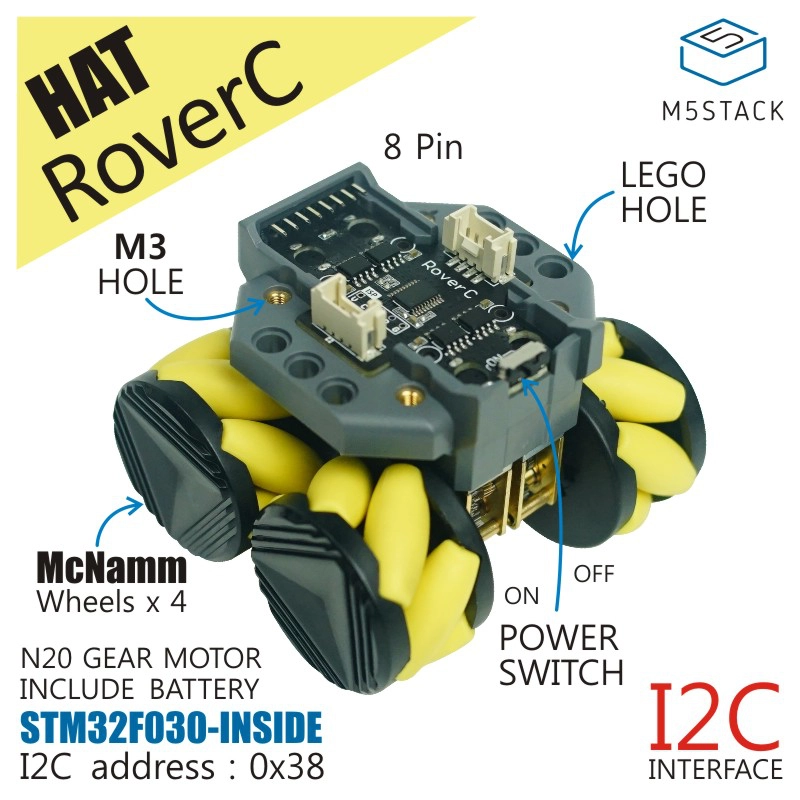
RoverCは、M5stickC に対応したプログラマブルな全方位移動型ロボットベースであり、M5stickC を挿入することで始動します。ベースのメインコントローラは stm32f030f4 というマイクロコントローラです。ベースには N20 ウォームギアモータが搭載されており、4 チャンネルのモータドライバで直接駆動されます。これらのモータは全方向に移動可能なメカナムホイールに接続されています。さらに、他のモジュールの拡張を容易にするために、2 つのグローブ互換 I2C ポートが提供されています。また、ベースはレゴブロックに対応しており、構造を拡張することが可能です。ベース背面には 18350 バッテリーを搭載し、車のパワーと耐久性の要求に応え、独立したスイッチで制御することができます。
特徴
- I2C アドレス 0x38
- リモートコントロール
- プログラマブル
- 4 チャンネルモータードライバー
- LEGO 互換
- 拡張用 Grove ポートの増設
- 18350 (900mAh) バッテリーホルダー搭載
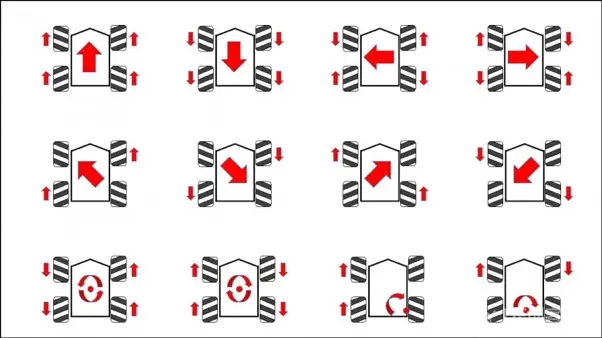
- 全方向への柔軟な動作が可能
含まれるもの
- 1x RoverC ベース (18350 (900mAh) バッテリーを含む)
アプリケーション
- 自律走行型ローバー
- ミニ RC 監視車
- スマートで認知性の高い玩具
仕様
| 仕様 | パラメータ |
|---|---|
| MCU | STM32F030F4P6 |
| 通信プロトコル | I2C:0x38 |
| 製品重量 | 213g |
| 梱包重量 | 217g |
| 製品サイズ | 75 x 75 x 55mm |
| 梱包サイズ | 115 x 85 x 65mm |
操作説明
ピンマップ
| M5StickC | G26 | G0 | 5V | GND |
|---|---|---|---|---|
| RoverC HAT | SCL | SDA | 5V | GND |
| I2C① | SCL | SDA | 5V | GND |
| I2C② | SCL | SDA | 5V | GND |
ソフトウェア
Arduino
1: この例は RoverC と JoyC を使用し、UDP 通信でワイヤレス制御を実現します。使用するデバイスに応じて、下記の対応するサンプルプログラムを選択してください。
注意:起動後、RoverC は「M5AP+2 バイト MAC アドレス」のホットスポット名を表示し、JoyC は RoverC の MAC アドレス名をスキャンします。JoyC 上の M5StickC の Home キーを 3 秒長押しして、車両のホットスポットをスキャンするとペアリングが開始されます。ペアリングが成功すると、画面左上にリンクアイコンがハイライト表示され、画面上にジョイスティックの値が表示されます。左ジョイスティック上下で前後移動、左右で平行移動、右ジョイスティック左右で旋回操作が可能です。
2: この例は RoverC 単体制御プログラムで、コントローラーから直接制御します。使用するデバイスに応じて、下記の対応するサンプルプログラムを選択してください。
UiFlow1
通信プロトコル
通信タイプ:I2C
I2C 通信アドレス: 0x38
Easyloader
| Easyloader | ダウンロードリンク | 備考 |
|---|---|---|
| RoverC-Pro Easyloader | download | / |
動画
バージョン変更履歴
| 発売日 | 製品変更内容 | 備考 |
|---|---|---|
| 2019.11 | 初回発売 | / |
| 2020.5 | バッテリーモデルを 16340(750mAh)から 18350(900mAh)に変更 | / |