Module 4EncoderMotor
SKU:M138
説明
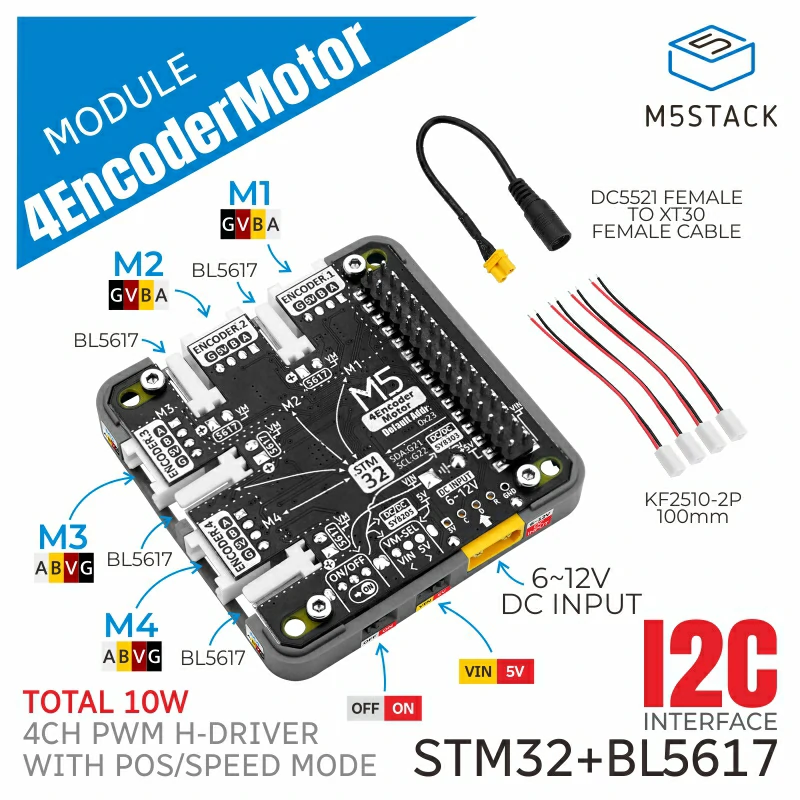
Module 4EncoderMotor は、STM32 + BL5617 H ブリッジドライバ IC を採用した 4 チャンネルエンコーダモータードライブモジュールです。I2C 通信方式を採用し、スレーブアドレスの変更をサポート、柔軟な制御が可能です。AB パルスエンコーダ信号入力により、モーターの動作状態と位置を正確に検出できます。デューティ比制御、絶対位置制御、速度調整などのモードをサポートし、正転・逆転・停止・ブレーキなど多様な機能を実現します。INA199 電源モニタを統合し、電圧・電流状態をリアルタイムに監視します。オンボード電源入力スイッチを搭載し、DC 5V または外部 DC 6~12V 電源入力を選択可能です。ロボット運動制御、自動化機器、スマートビークル、研究室設備、産業自動化システムなどの分野に適用できます。
特徴
- 4 チャンネルエンコーダモータードライブ
- AB パルス信号入力
- デューティ比、絶対位置制御、速度調整モード
- I2C 通信方式
- 電源電流・電圧モニタリング
含まれるもの
- 1 x Module 4EncoderMotor
- 1 x DC5521 メス - XT30 メス ケーブル
- 4 x KF2510-2P 100mm
アプリケーション
- ロボット運動制御
- 自動化機器
- スマートビークル
- 産業自動化システム
仕様
| 仕様 | パラメータ |
|---|
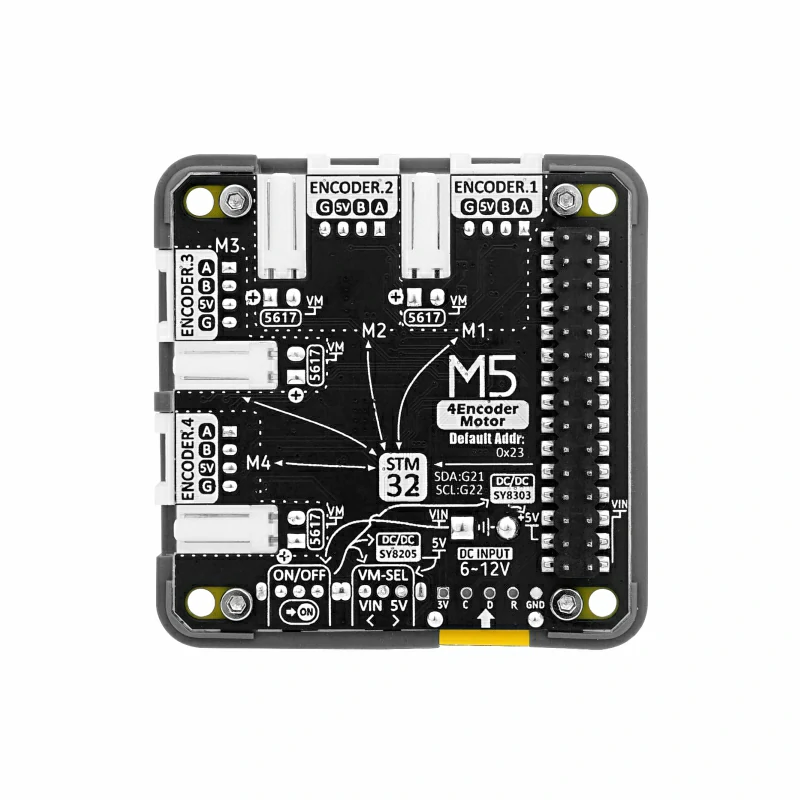
| MCU | STM32F030C8T6 |
| エンコードモータードライバ IC | BL5617 |
| 最大対応電流 | 3.0A |
| 出力 | 最大 10W |
| 外部 DC 電源 | 6 ~ 12V |
| 通信インターフェース | I2C 通信 @ 0x24 |
| 動作温度 | 0°C ~ 40°C |
| 製品サイズ | 54.0 x 54.0 x 13.1mm |
| 製品重量 | 15.8g |
| 梱包サイズ | 95.0 x 66.0 x 26.0mm |
| 梱包重量 | 45.7g |
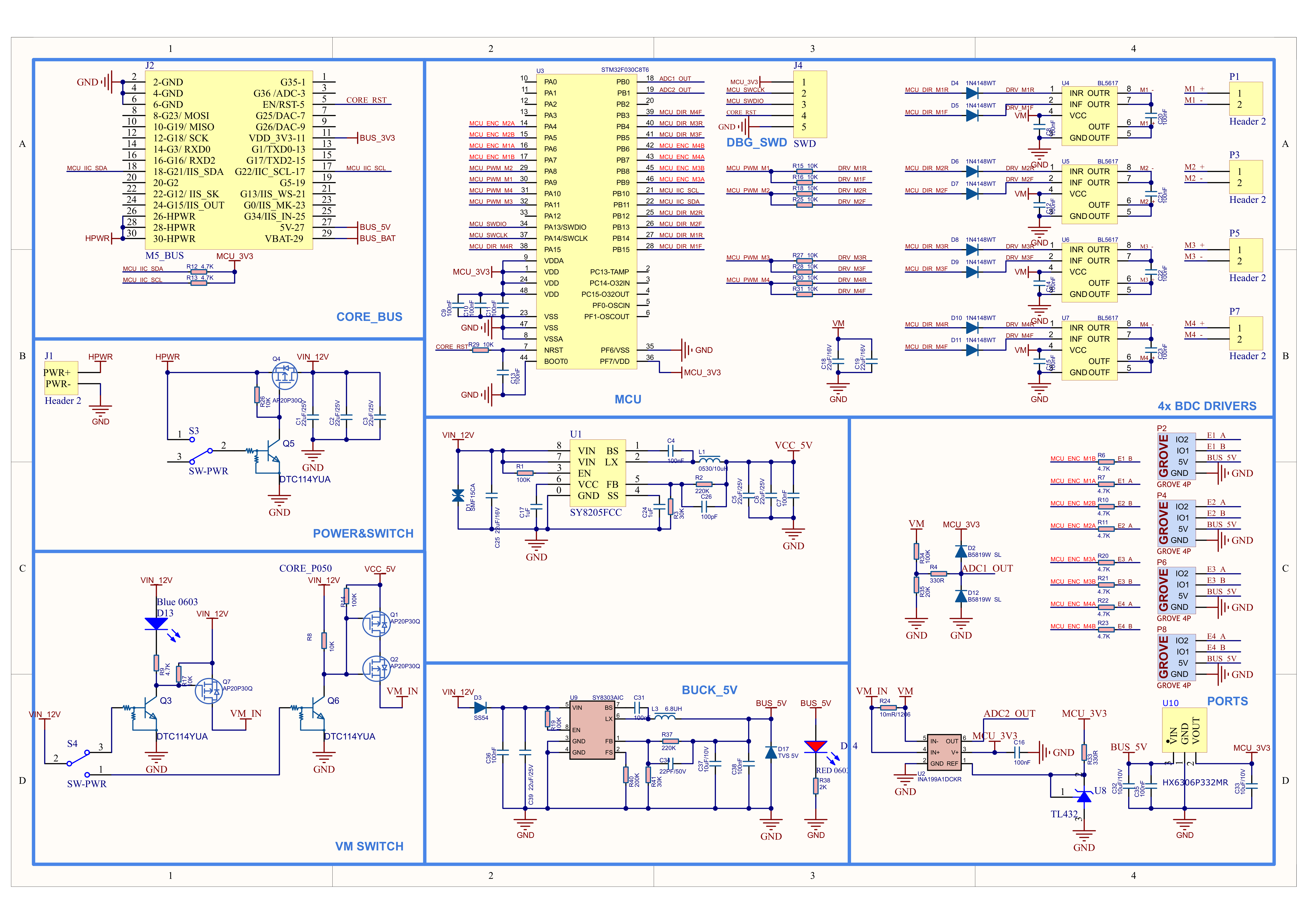
回路図
ピンマップ
電流・電圧検出ピン
| STM32 | PB0 | PB1 |
|---|
| モーター電圧検出 | ADC1_OUT | |
| 電流検出 | | ADC2_OUT |
モーター方向制御ピン
| STM32 | PB14/PB15 | PB12/PB13 | PB4/PB5 | PA15/PB3 |
|---|
| BL5617 (方向) | MCU_DIR_M1R/MCU_DIR_M1F | MCU_DIR_M2R/MCU_DIR_M2F | MCU_DIR_M3R/MCU_DIR_M3F | MCU_DIR_M4R/MCU_DIR_M4F |
PWM 制御ピン
| STM32 | PA9 | PA8 | PA11 | PA10 |
|---|
| BL5617 (PWM) | MCU_PWM_M1 | MCU_PWM_M2 | MCU_PWM_M3 | MCU_PWM_M4 |
A/B 信号検出ピン
| STM32 | PA6/PA7 | PA4/PA5 | PB9/PB8 | PB7/PB6 |
|---|
| エンコーダーモーター | E1_A/E1_B | E2_A/E2_B | E3_A/E3_B | E4_A/E4_B |
M5-Bus
| PIN | LEFT | RIGHT | PIN |
|---|
| GND | 1 | 2 | |
| GND | 3 | 4 | |
| GND | 5 | 6 | RST |
| 7 | 8 | |
| 9 | 10 | |
| 11 | 12 | |
| 13 | 14 | |
| 15 | 16 | |
| SDA | 17 | 18 | SCL |
| 19 | 20 | |
| 21 | 22 | |
| 23 | 24 | |
| HPWR | 25 | 26 | |
| HPWR | 27 | 28 | 5V |
| HPWR | 29 | 30 | BAT |
製品サイズ
UiFlow1
ソフトウェア
Arduino
UiFlow1
UiFlow2
内蔵ファームウェア
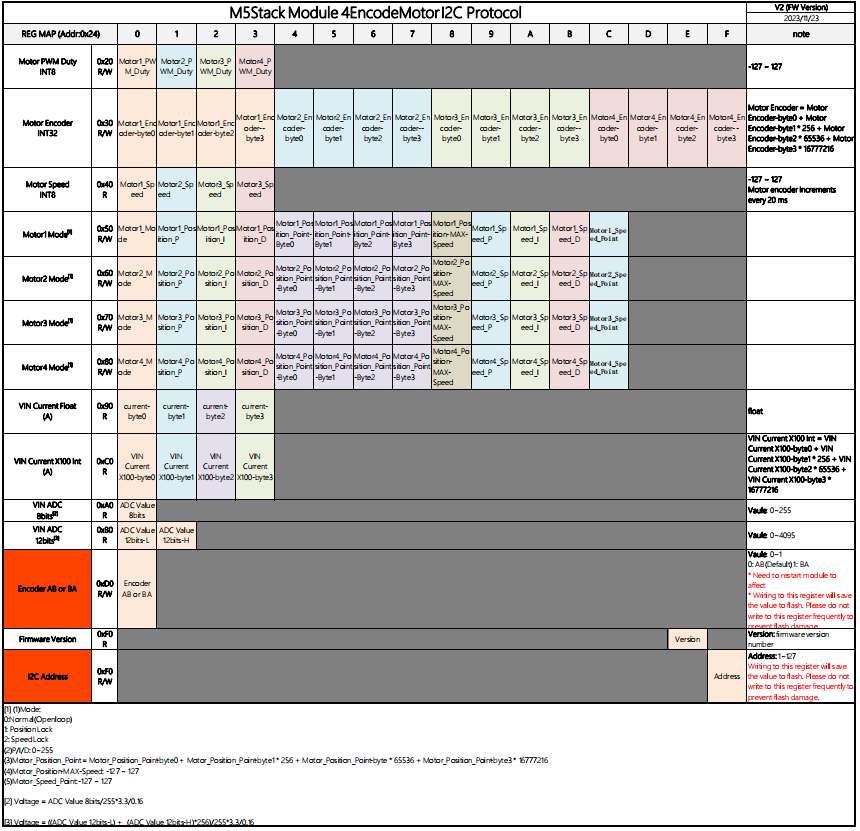
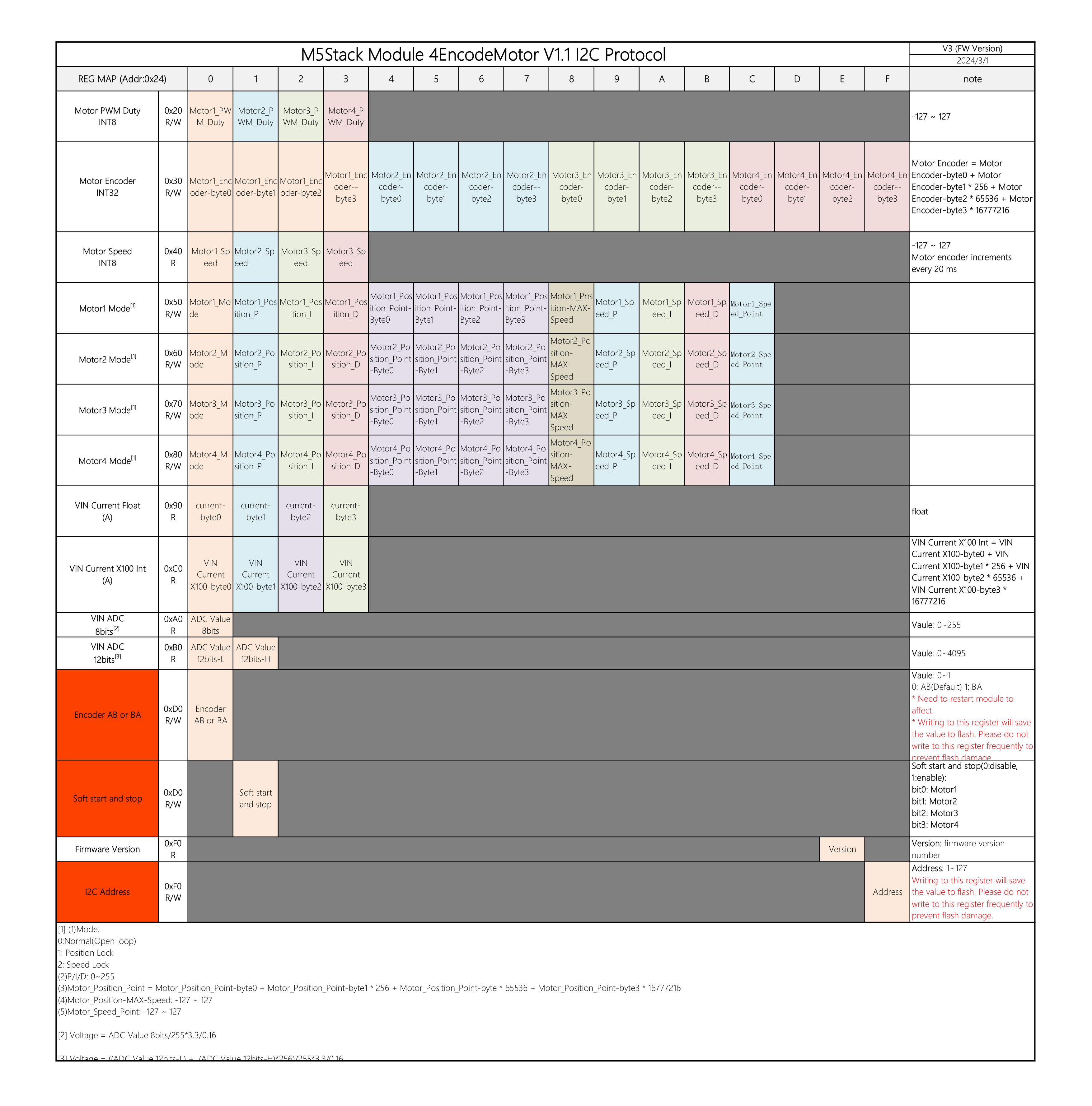
通信プロトコル
Easyloader
Module 4EncoderMotor 内蔵ファームウェアアップグレードプログラム Easyloader。
| Easyloader | ダウンロードリンク | 備考 |
|---|
| Module 4EncoderMotor Firmware Upgrade Easyloader | download | / |
動画
- Module 4EncoderMotor 機能紹介