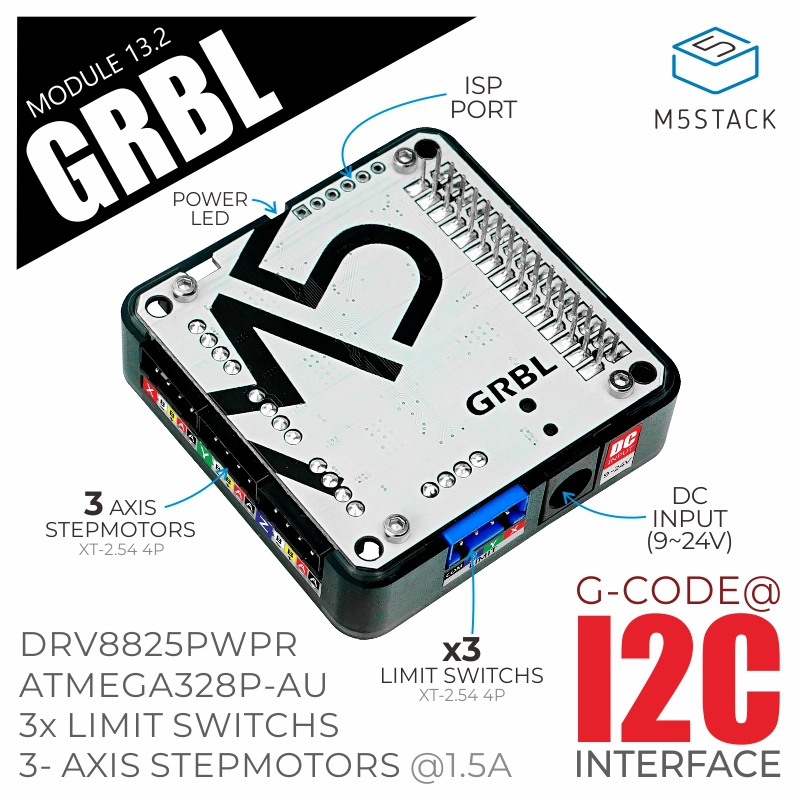
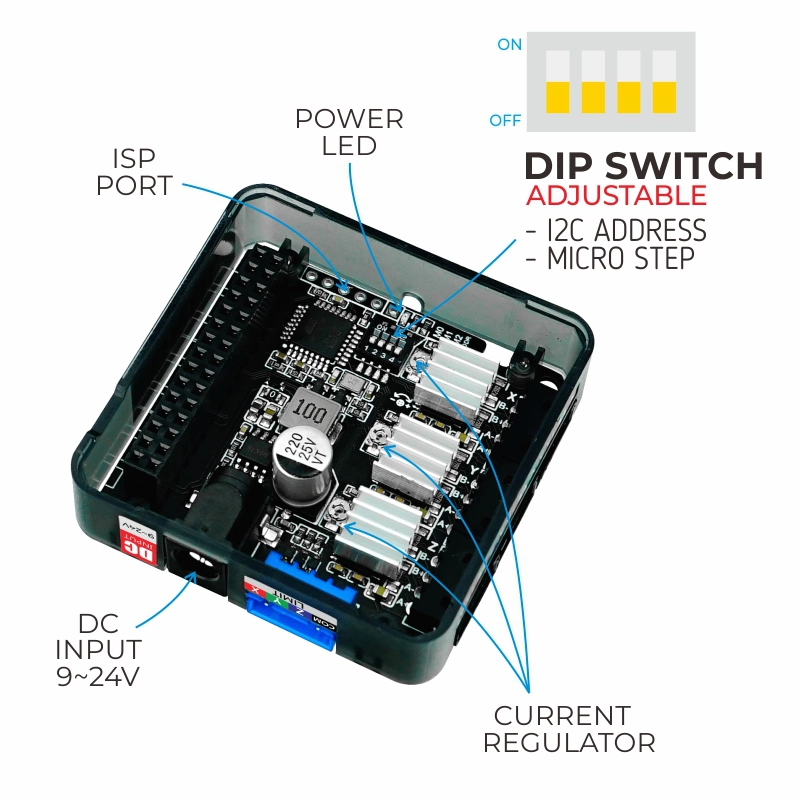
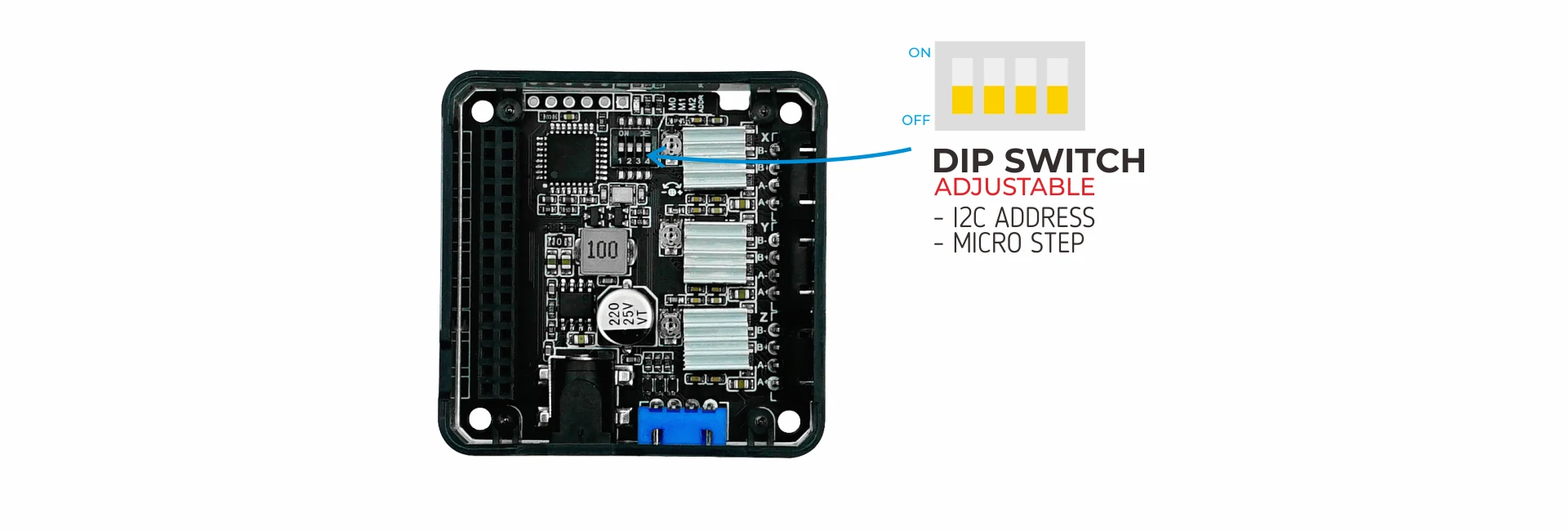
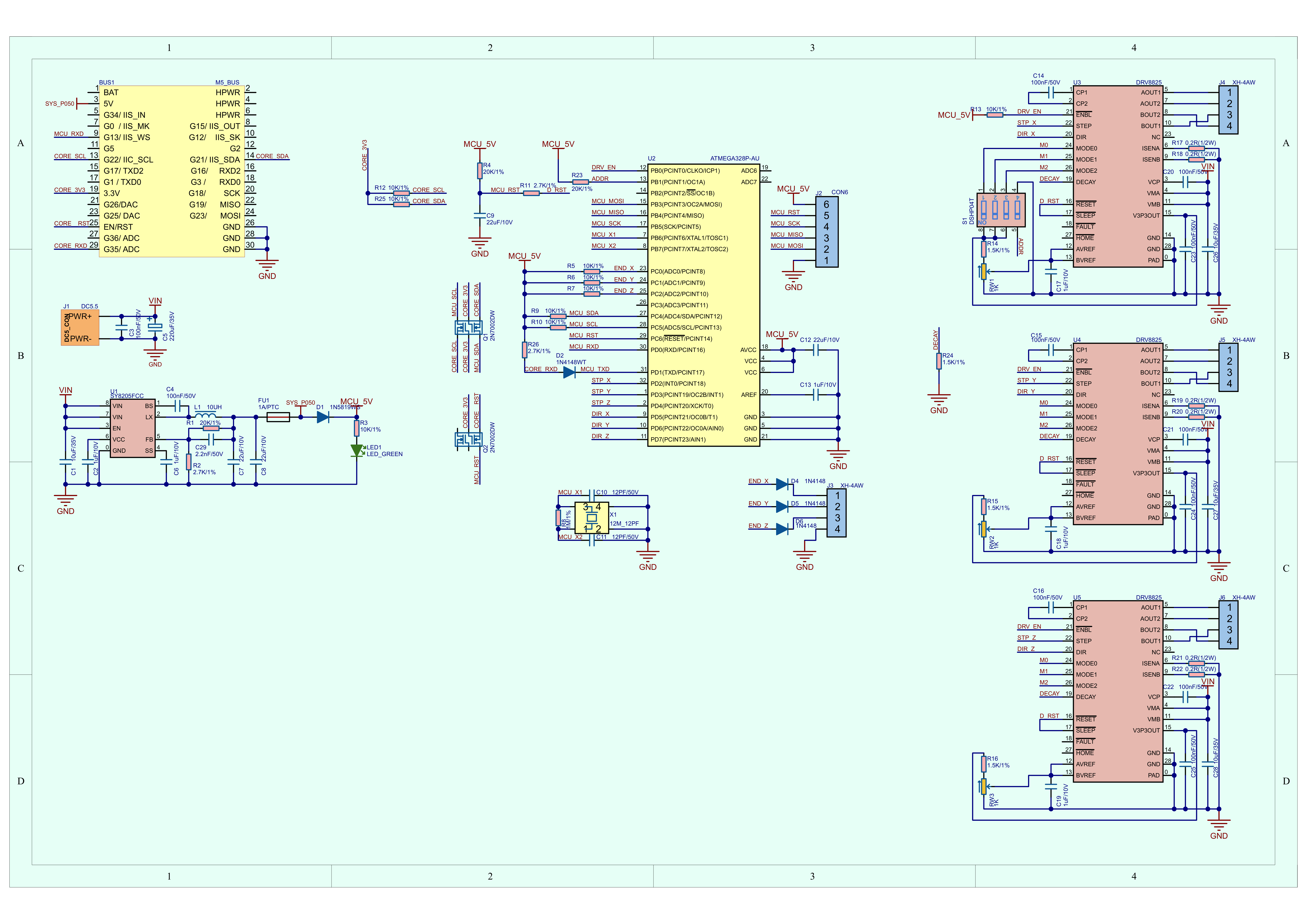
Module13.2 GRBL is a three-axis stepper motor driver module in the M5Stack stackable module series. It uses the ATmega328P-AU controller paired with three DRV8825PWPR stepper motor driver chips, enabling simultaneous control of three bipolar stepper motors. It provides an I2C communication interface (addr: 0x70) and integrates a DIP switch for adjusting motor step subdivision (up to 1/32 microstepping) and I2C address configuration (supports dual addresses 0x70 and 0x71). This means you can achieve six-axis control by stacking two Module13.2 GRBL modules. The power input interface supports DC 9~24V, with a motor drive current of up to 1.5A. It also features three sets of limit switch signal interfaces for external limit switches to enable motor braking (active low). It is suitable for various stepper motor motion control scenarios, such as printers, robotic arms, etc.