LoRaWAN
功能说明
使用LoRaWAN模块向同一频段内的其他LoRa设备广播数据
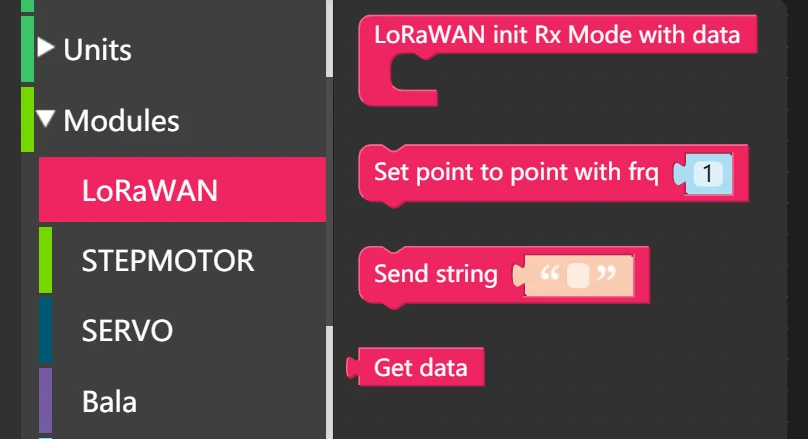
LoRaWAN init Rx Mode with data
设置数据接收回调
Set point to point with frq
设置通信频率
Send string
发送消息
Get data
获取接收的数据(在数据接收回调中使用)
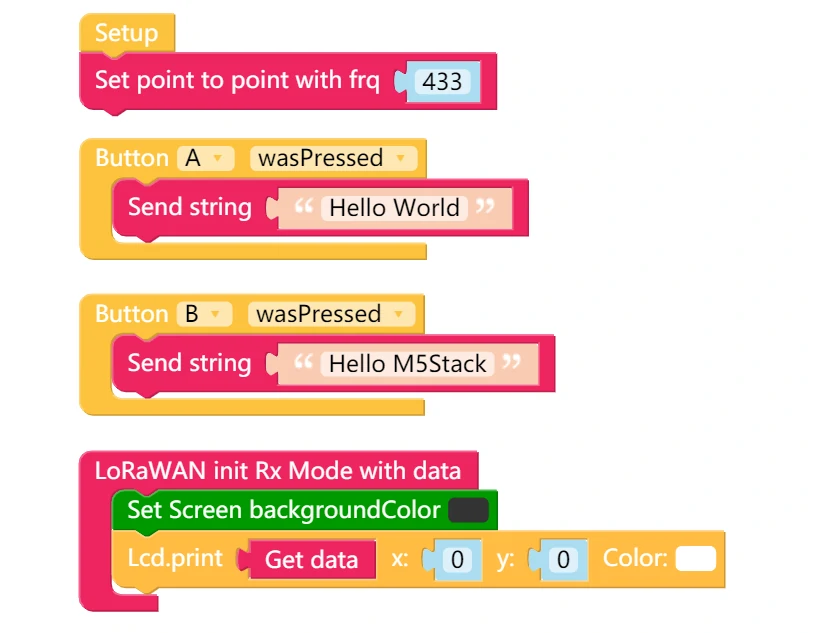
使用方法
按下按键A/B发送消息,并实时监听接收数据
STEPMOTOR
功能说明
步进电机控制
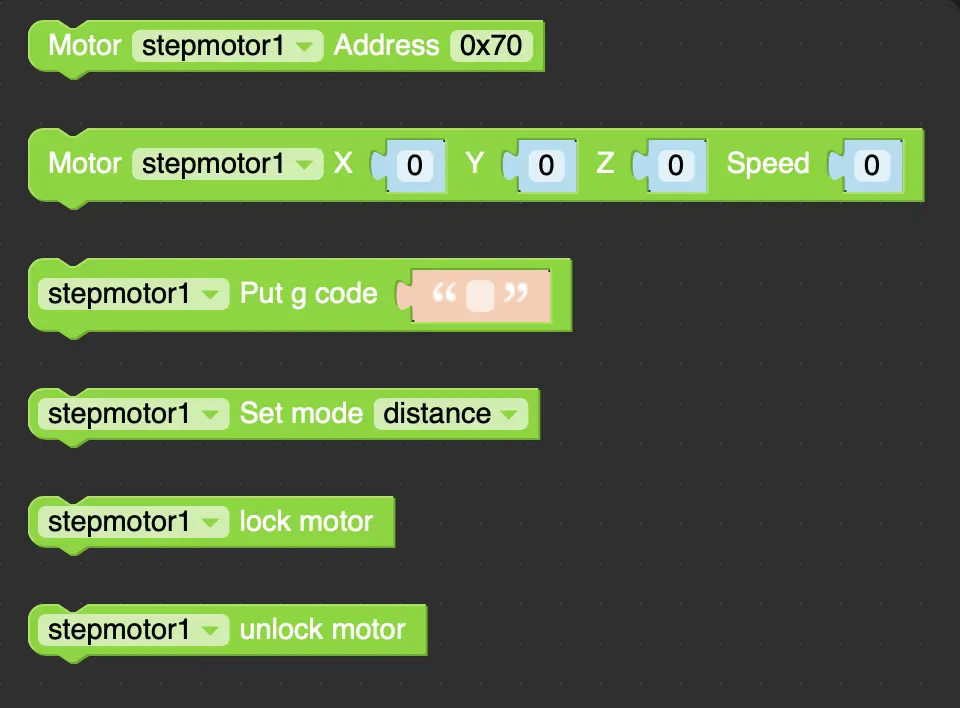
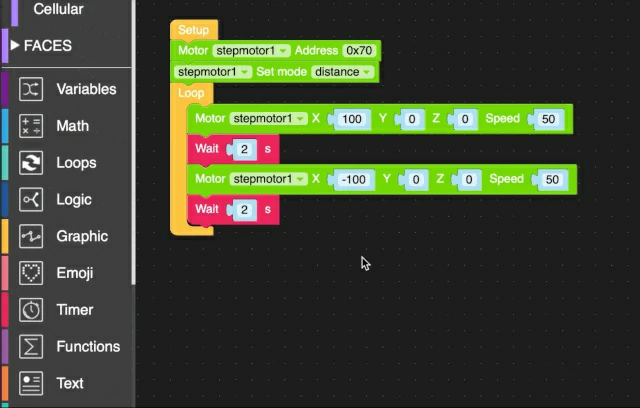
Motor Address
Module的I2C地址
Motor X Y Z Speed
设置步进电机X轴Y轴Z轴转动步数和速度
Put g code
运行G代码
Set mode
设置电机运行模式,距离模式或相对值模式
lock motor
锁定电机
unlock motor
解锁电机
使用方法
电机正反转交替运行
SERVO
功能说明
舵机控制
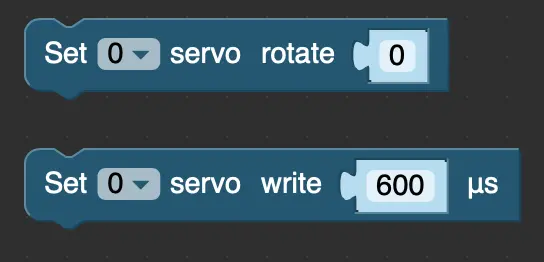
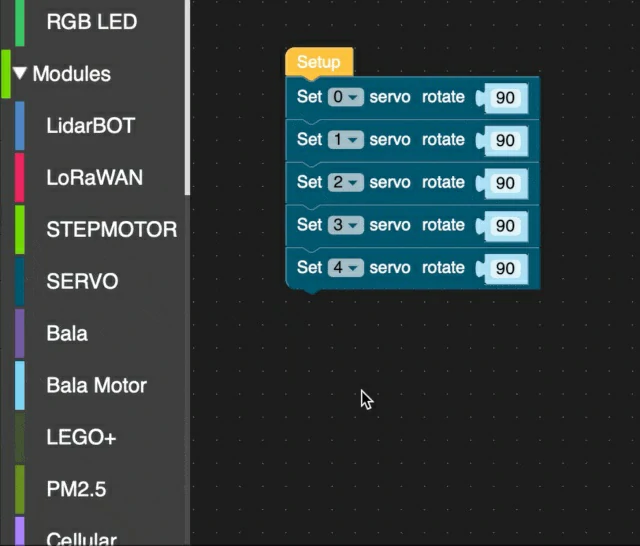
Set servo rotate
设置指定舵机角度
Set servo write us
设置舵机脉冲时间
使用方法
控制0-5号舵机旋转90度
Bala Motor
功能说明
控制Bala编码电机运行
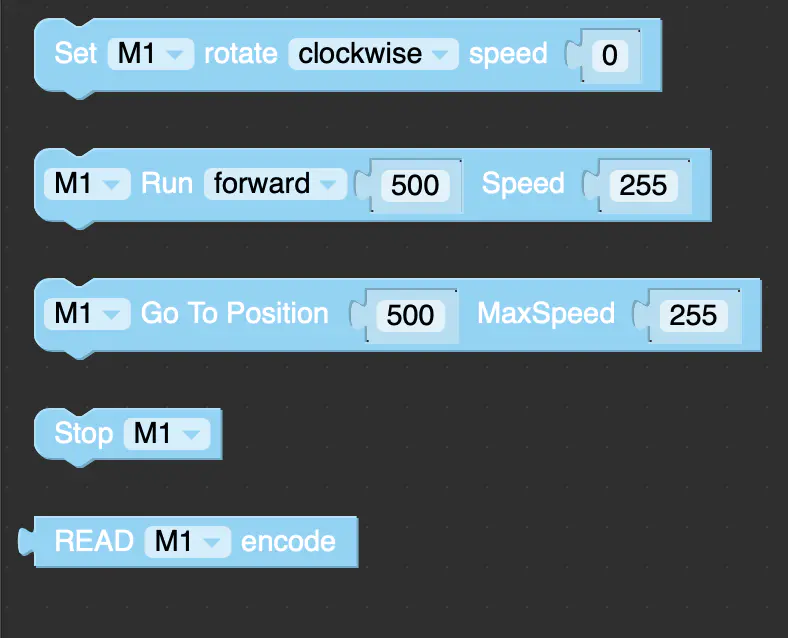
set rotate speed
设置电机转动方向和速度
Run Speed
设定以某个速度朝运行方向行走一定脉冲数
Go To Position MaxSpeed
以设定的速度运行500个脉冲
Stop
电机停止
Read encode
读取编码器数值
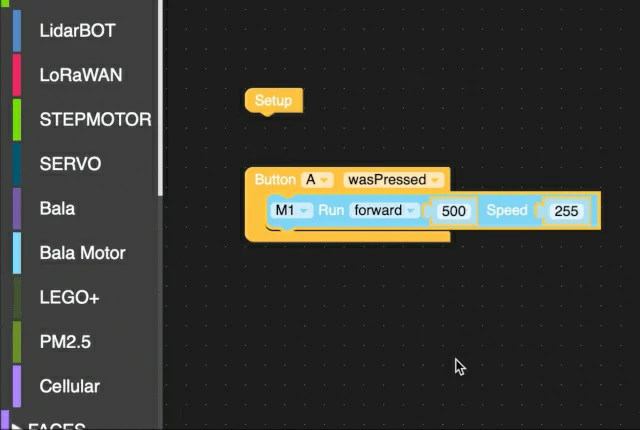
使用方法
A键按下以255的速度向前行走500脉冲
Bala
功能说明
控制Bala运行
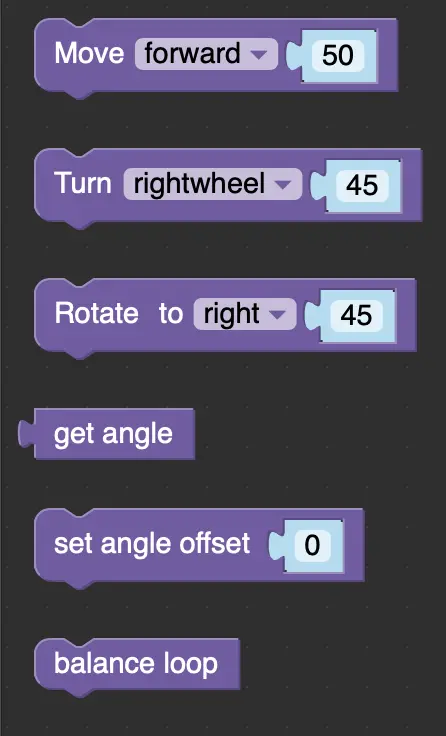
Move
设置电机转动方向和速度
Turn
设置转弯脉冲数
Rotate to
设置转弯度数
get angle
返回当前角度
set angle offset
设置角度偏移量
balance loop
自动平衡
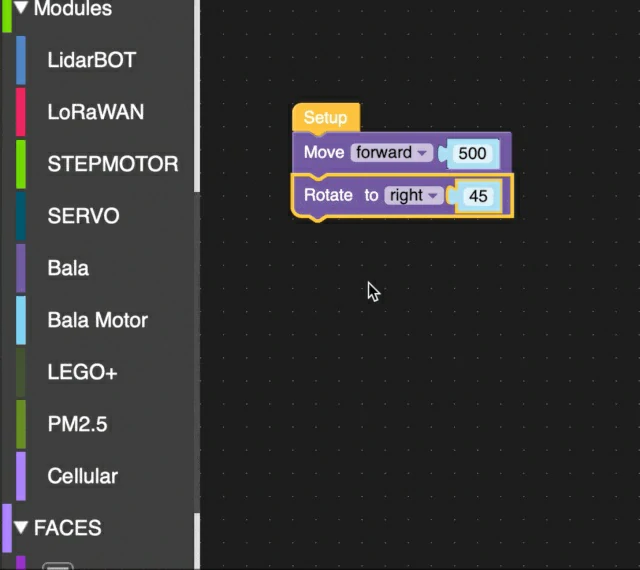
使用方法
Bala前进500个脉冲转弯45度
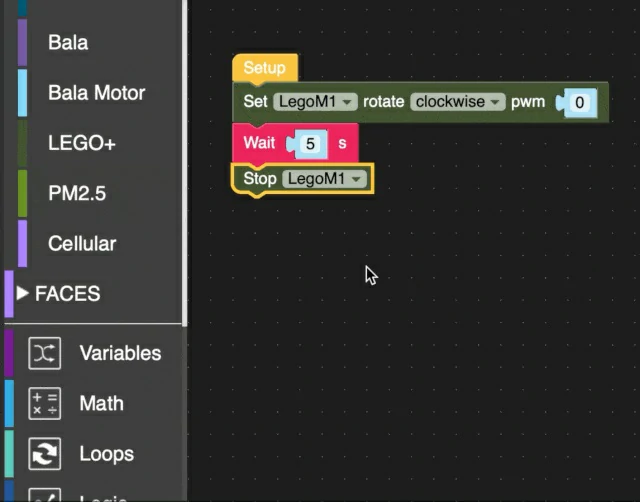
DC_MOTOR
功能说明
控制lego编码电机运行
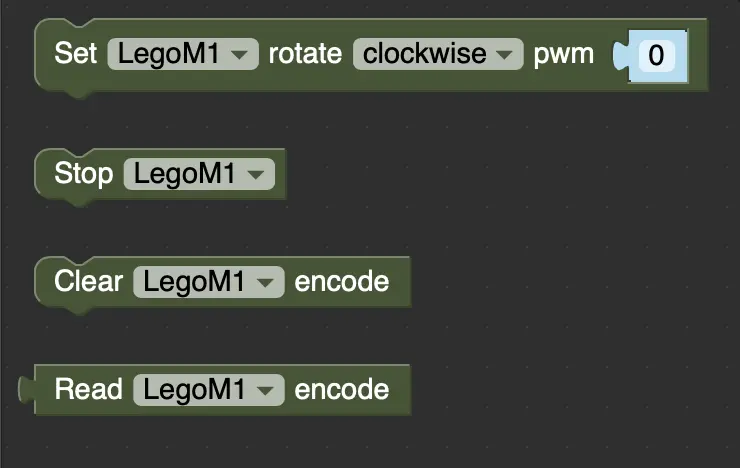
Set rotate pwm
设置电机方向和转速
Stop
电机停止
Clear encode
编码器清零
Read encode
读出编码器数据
使用方法
设定电机运行5秒钟停止
PM2.5
功能说明
灰尘颗粒物检测,输出浓度或数量
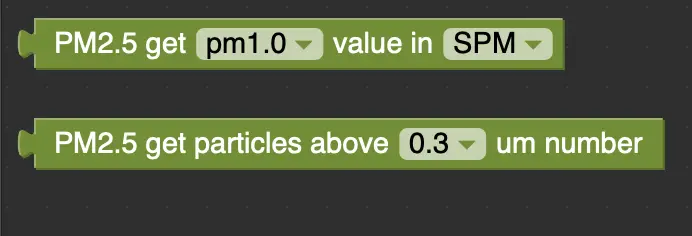
PM2.5 get value in
设置检测颗粒物直径与检测模式,返回检测结果 SPM为标准颗粒物浓度值 APM为大气环境颗粒物浓度值
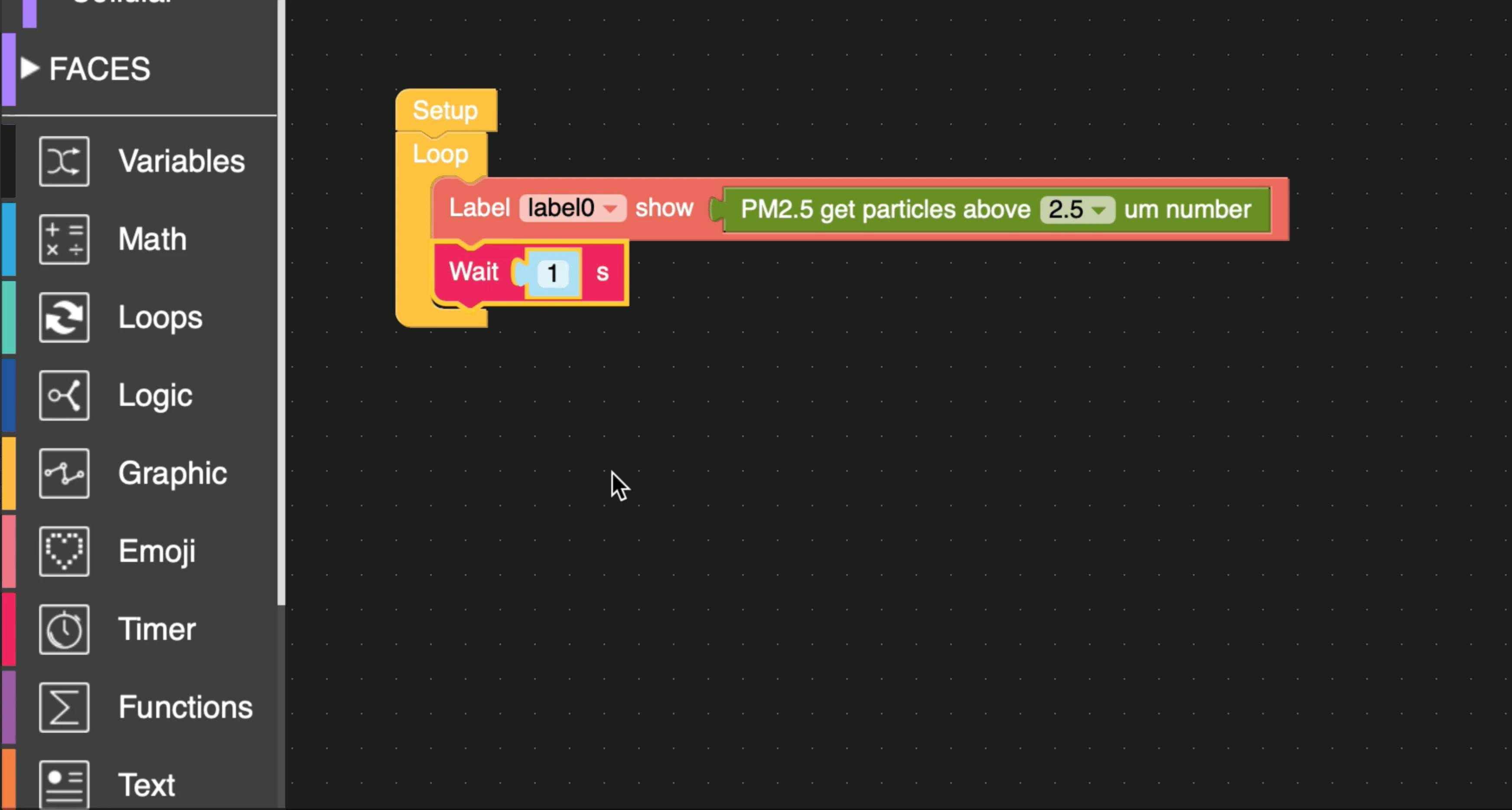
PM2.5 get particles above um number
返回指定直径的颗粒物含有数量
使用方法
屏幕显示PM2.5颗粒物数量
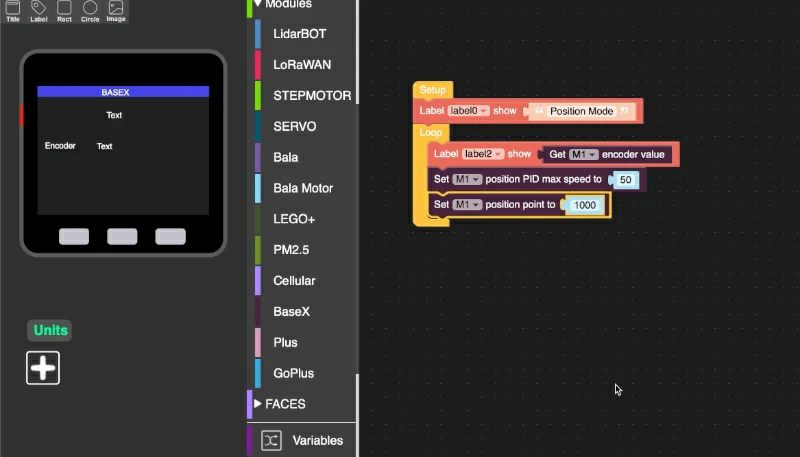
BaseX
功能说明
控制乐高电机与舵机
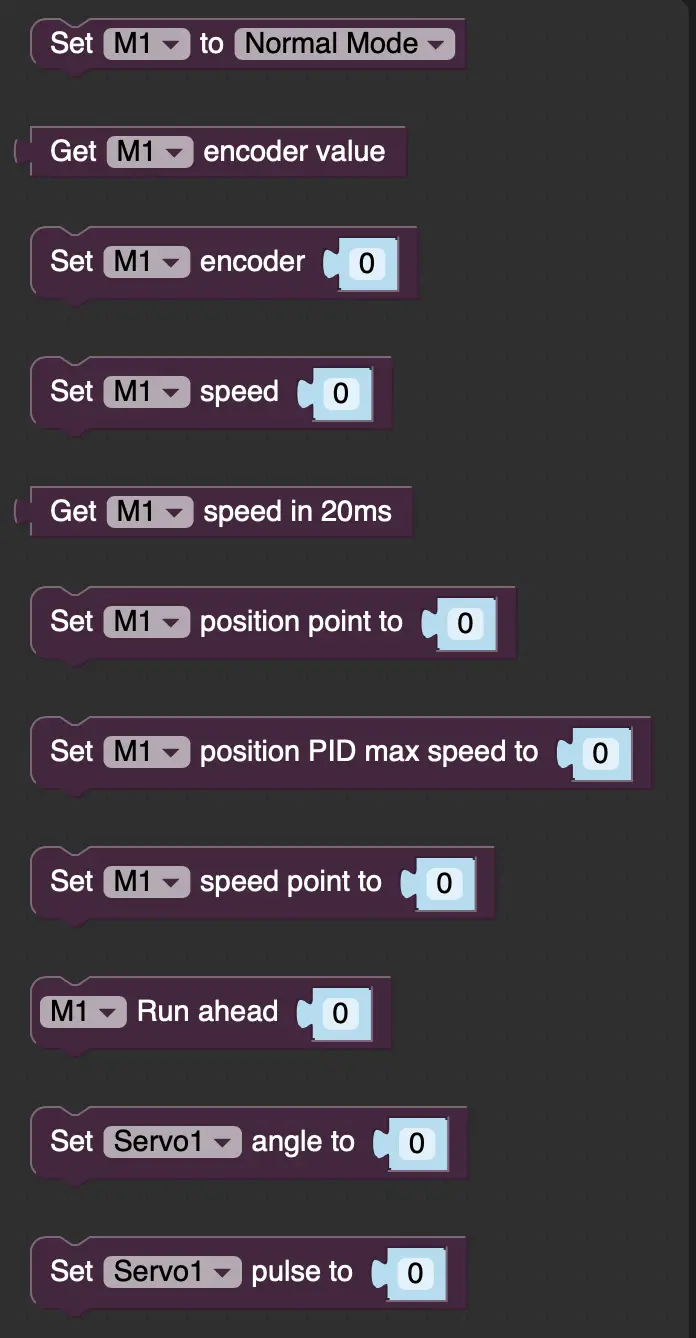
Set to Mode
设置电机模式(普通/位置/速度)
Get encoder value
获取编码器的数值
Set encoder
设置编码器的数值
Set speed
设置电机速度(普通模式)
Get speed in 20ms
获取电机20ms内转动的速度
Set position point to
设置电机位置
Set position PID max speed to
设置位置模式电机修正速度
Set speed point to
设置电机速度(速度模式)
Run ahead
向前转到指定位置
Set Servo angle to
设置舵机角度
Set Servo pulse to
设置舵机脉冲数
使用方法
设置电机以50的速度转1000
PLUS
功能说明
读取编码器
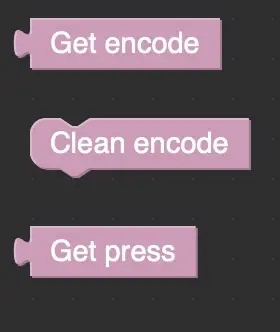
Get encode
读取编码器数值
Clean encode
编码器清零
Get press
读取编码器按键
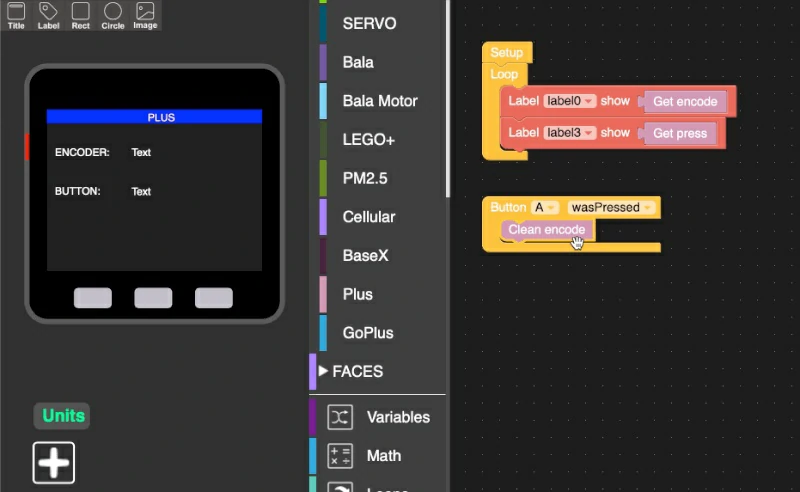
使用方法
显示编码器状态
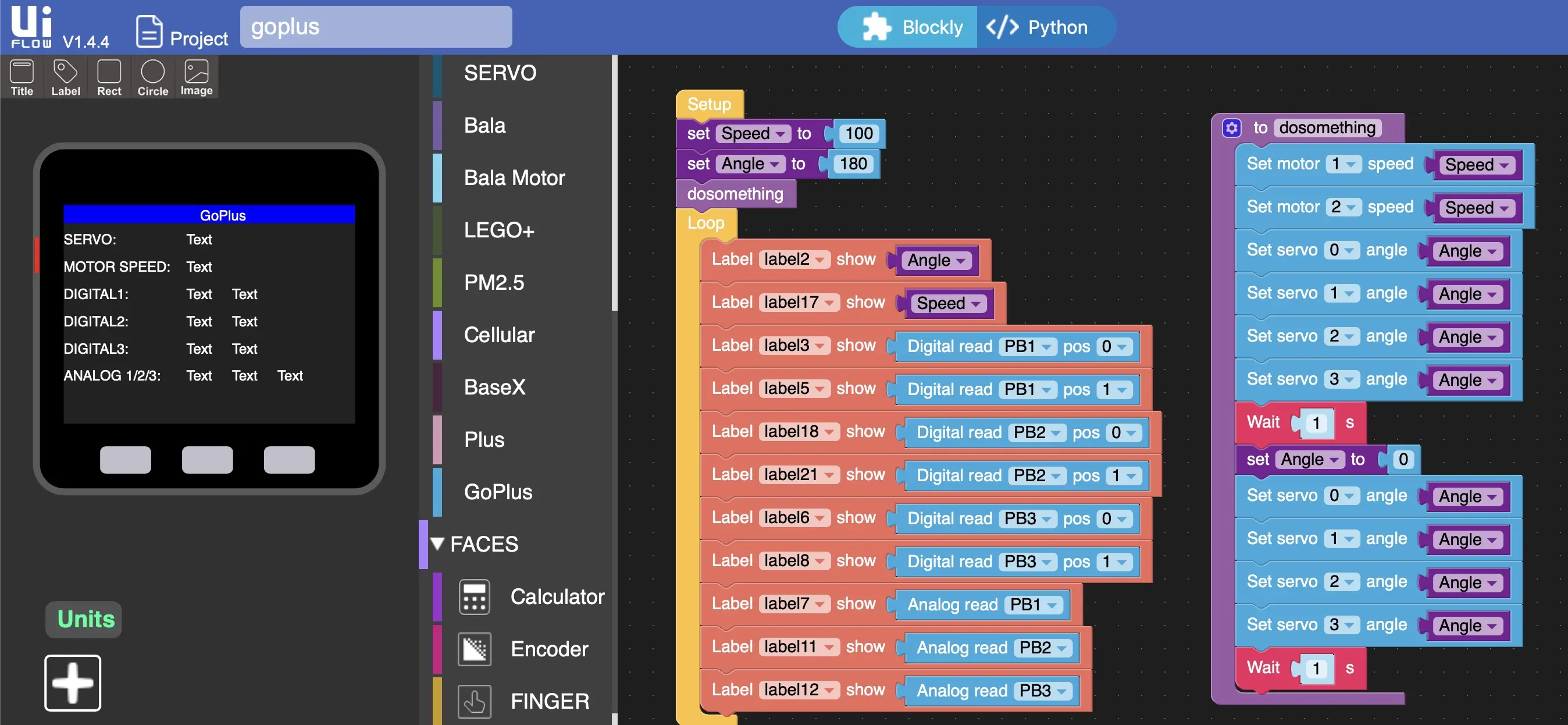
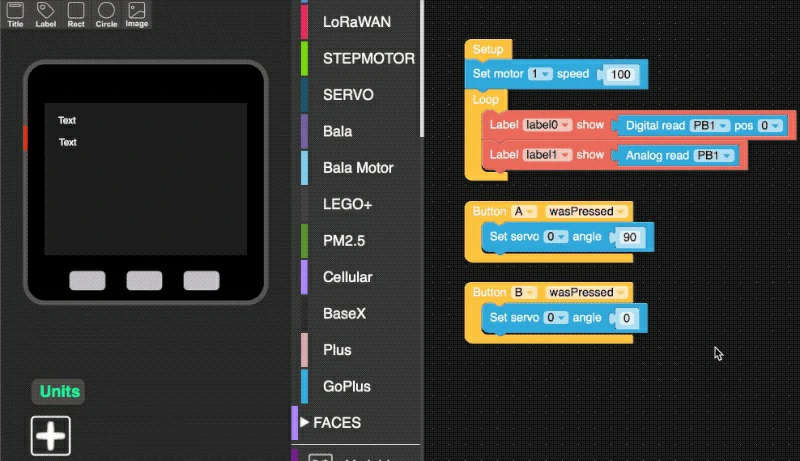
GoPlus
功能说明
控制直流电机和舵机以及读取模拟量和数字量
Set servo angle
设置舵机角度
Set motor speed
设置电机速度
Digital read pos
读取端口指定引脚的数字量
Analog read
读取指定端口的模拟量
使用方法
读取数字量、模拟量、控制舵机与电机
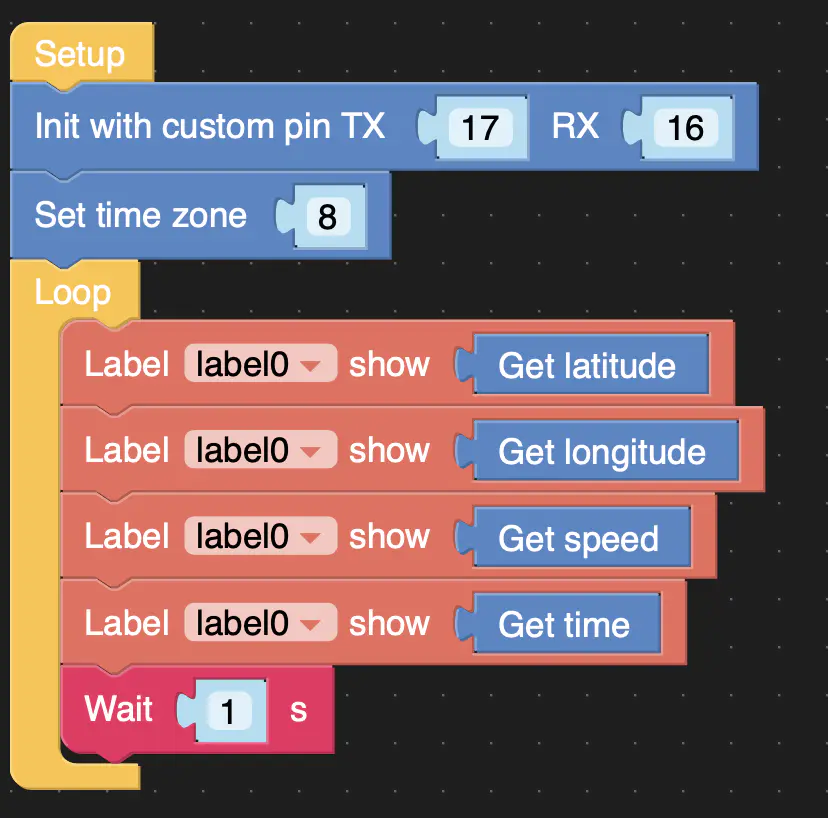
GPS
功能说明
获取GPS信息
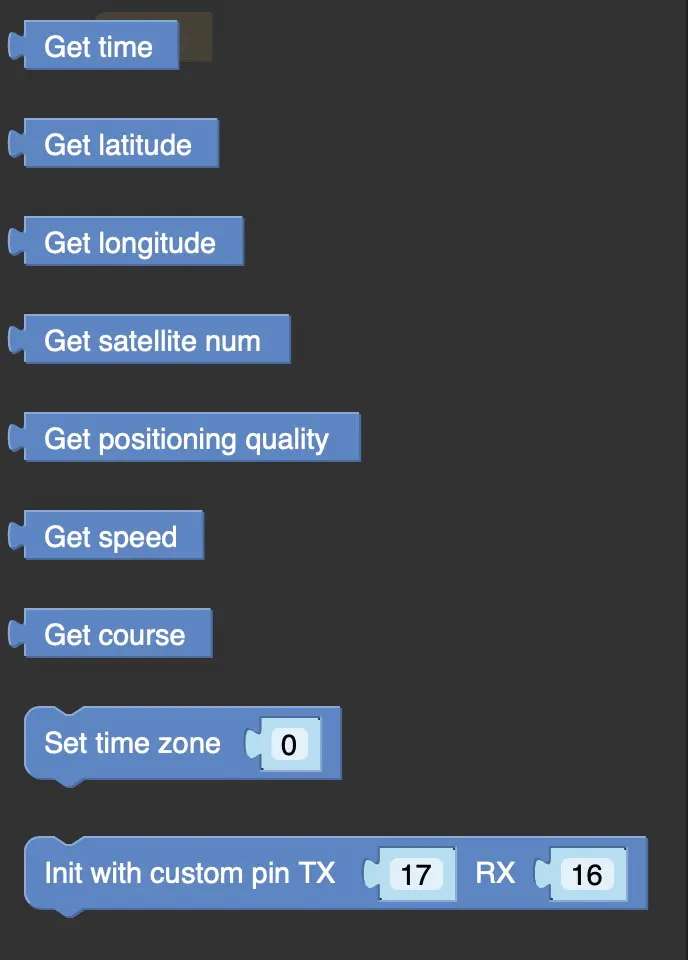
get time
获取本地时间
get latitude
获取纬度
get longitude
获取经度
get satellite num
获取搜星数量
get positioning quality
获取定位精度
get speed
获取对地速度
get course
获取地理北极位置
set time zone
设置本地时区
使用方法
在屏幕上显示GPS相关信息