

Bala2
SKU:K014-C










Description
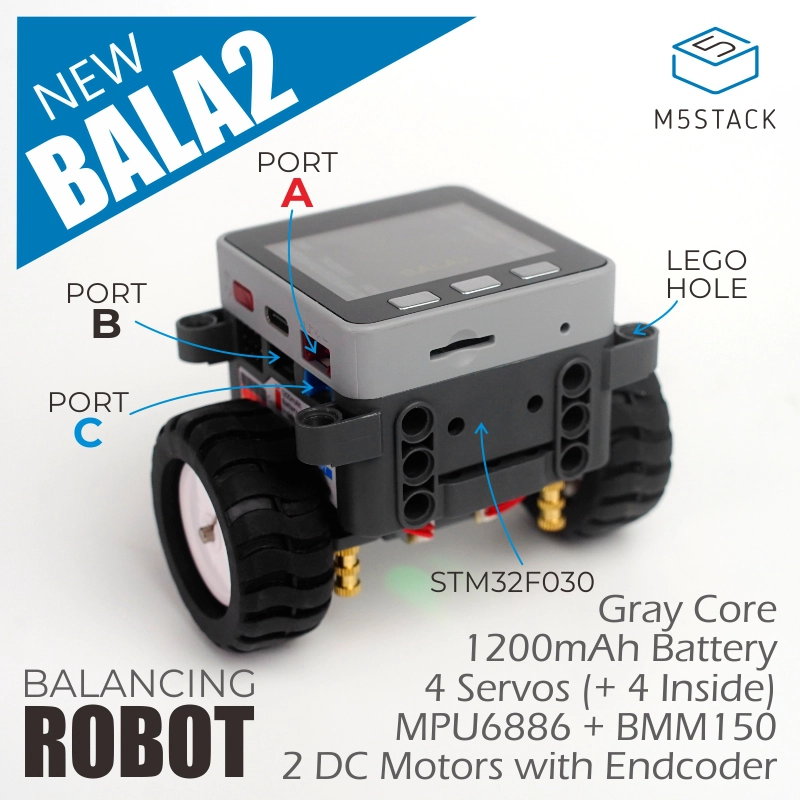
Bala2 is a balancing car application. This product is a self-balancing robot composed of the M5Stack Gray and the BALA2 motor base. The base uses the STM32F030C8T6 as the main controller, powered by two N20 encoded reduction motors, and has a built-in 1200mAh battery. The name "BALA" comes from the abbreviation of "Balance," and this is the second-generation product. The BALA2 base includes a rich set of interfaces, supporting 8 servo motors in addition to the regular PortB and PortC, with 4 interfaces directly connectable and the other 4 needing to be extended from inside the base. You can program it to move freely or develop remote control functions with WiFi. Even if you have never worked with balancing car programs before, you can quickly complete programming and control it using UiFlow. The product comes pre-installed with a balancing car application, using a PID closed-loop algorithm to maintain vertical balance during operation, and utilizes accelerometer and gyroscope attitude data to correct its direction and position.
Tutorial
Features
- 9-axis attitude sensor
- Dual-wheel drive, PID control balance
- Grove expansion interface (PORTB/PORTC)
- 8 servo motor drives, 4 external, 4 internal
- Supports WiFi, programmable
- Built-in speaker
- Supports TF card expansion
- Compatible with LEGO
- I2C communication: 0x3A
- Development platforms
- MicroPython
- UiFlow
- Arduino
Includes
- 1 x Gray
- 1 x Bala2 Base
- 2 x HY2.0-4P connection cables (20cm)
- 4 x wheel hub connectors
- 2 x LEGO arms
- 1 x hex key
- 1 x USB Type-C cable (1m)
Applications
- Balancing car
Specifications
| Specification | Parameters |
|---|---|
| MCU | STM32F030C8T6 |
| ESP32 | 240MHz dual-core, 600 DMIPS, 520KB SRAM, Wi-Fi |
| Flash/RAM | 16MB Flash |
| LCD | 2-inch, 320x240 color TFT LCD, ILI9342C |
| Speaker | 1W-0928 |
| MEMS | BMM150+MPU6886 |
| Motor drive | HR8833 |
| Base controller | STM32F030 |
| Interfaces | GROVE I2C x 1/UART x 1/GPIO x 1/SERVO x 4(+4 Extendable Channels) |
| Battery capacity | 1200mAh |
| Net weight | 157.0g |
| Gross weight | 337.0g |
| Product Size | 54 x 54 x 65mm |
| Packaging dimensions | 100 x 100 x 100mm |
| Casing material | Plastic |
Learn
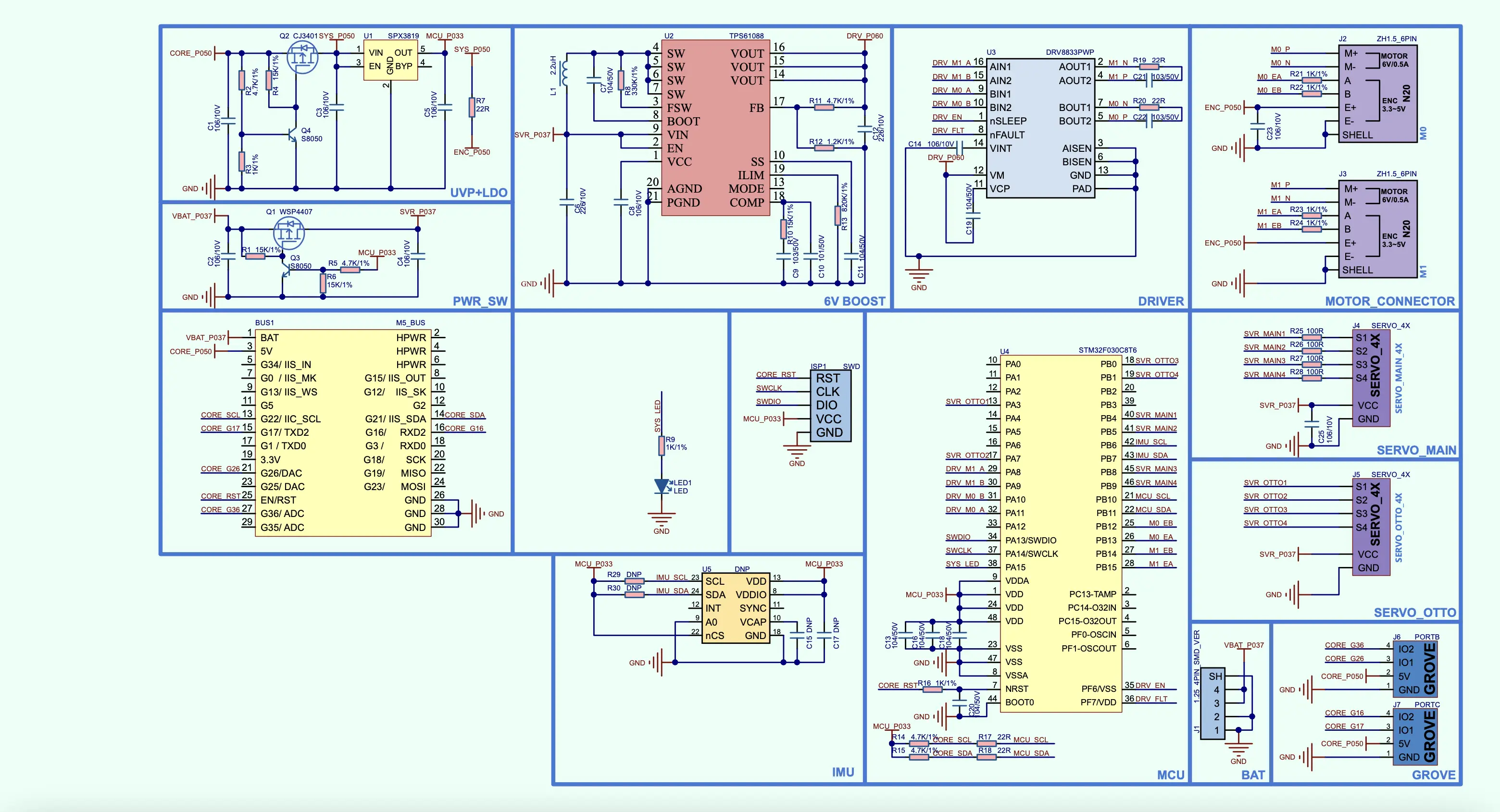
Schematics
PinMap
HY2.0-4P
| Fire | G22 | G21 | G26 | G36 | G16 | G17 |
|---|---|---|---|---|---|---|
| PORT A | SCL | SDA | ||||
| PORT B | DAC | ADC | ||||
| PORT C | RX | TX |
Softwares
Arduino
Easyloader
| Easyloader | Download Link | Notes |
|---|---|---|
| Bala2 Test Firmware Easyloader | download | / |
Video
- Power on and run, hold ButtonB + left power button to enter calibration mode, adjust with A/C, save with B button.