
RoverC-Pro
SKU:K036-B








説明
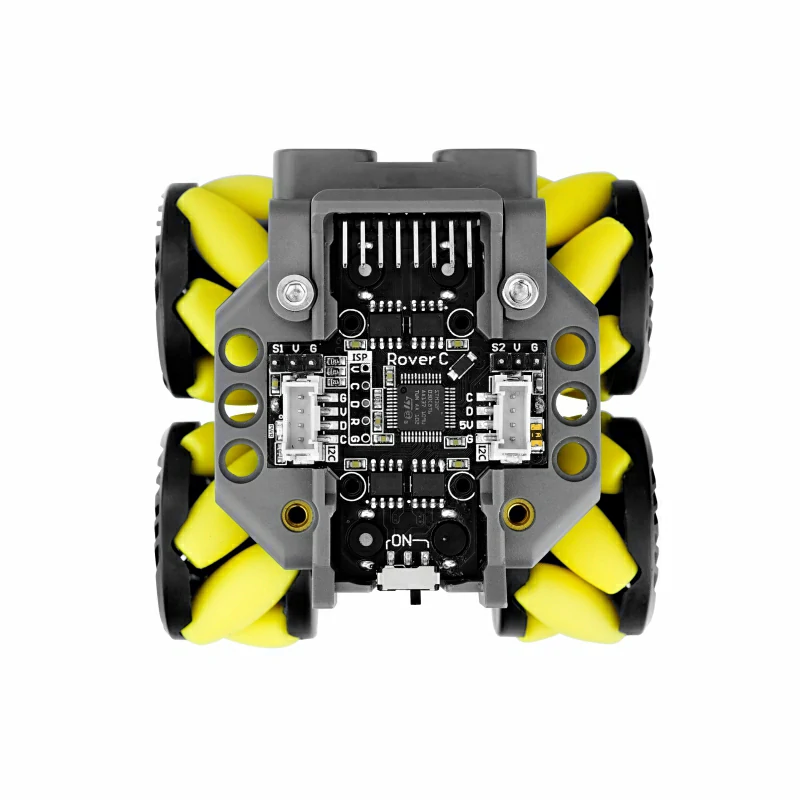
RoverC-Pro は、プログラム可能なメカナムホイール全方向移動ロボットベースです。M5StickC/M5StickC PLUS に対応し、M5StickC/M5StickC PLUS を挿入するだけで使用できます。メイン制御チップは STM32F030C6T6 で、4 つの N20 ウォーム減速モーターを搭載し、モータードライバーには L9110S を使用しています。PRO バージョンにはサーボ制御のグリップ機構があり、物体を把持することができます。ベースには 2 つのサーボインターフェースと 2 つの Grove 互換 I2C インターフェースがあり、他のモジュール拡張が可能です。LEGO の穴とも互換で構造的に拡張できます。背面には交換可能な 16340 (700mAh) 充電式バッテリーを搭載しており、M5StickC/M5StickC Plus から直接充電可能です。ベース後部には電源スイッチとインジケーターがあります。
特徴
- I2C アドレス 0x38
- 遠隔操作対応
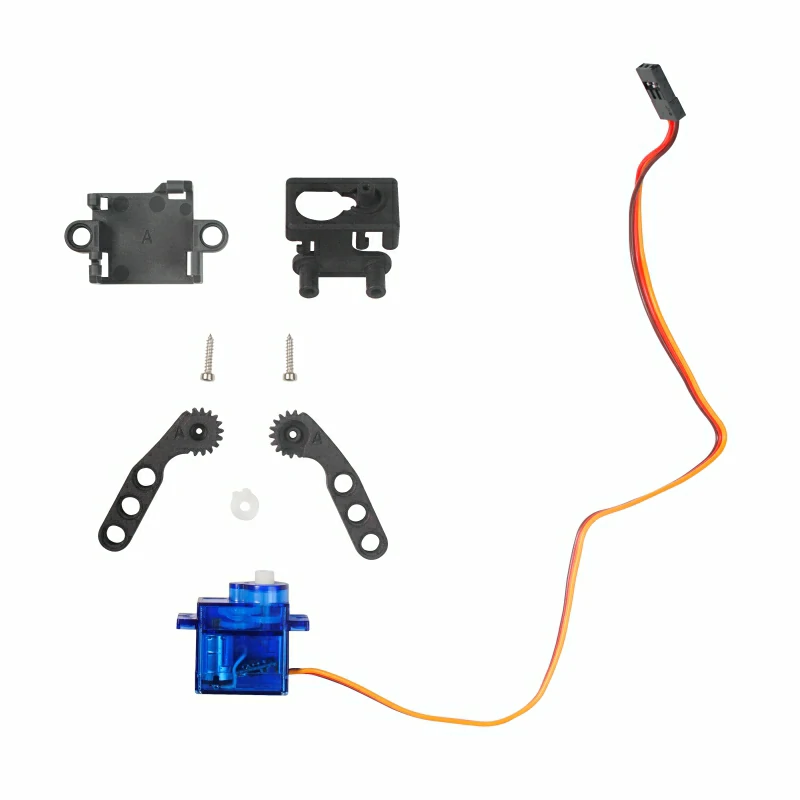
- グリップ機構搭載
- プログラム可能
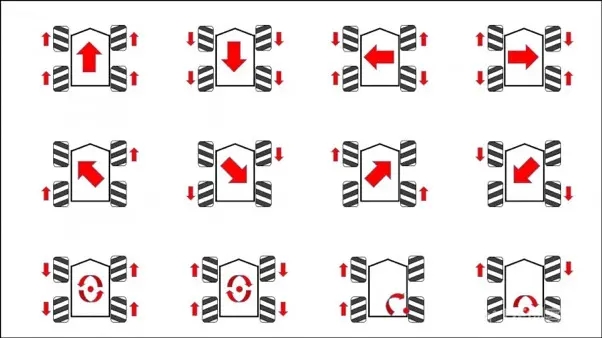
- 全方向の柔軟な移動
- 4 チャンネルモータードライバー
- LEGO 互換
- 拡張用 Grove インターフェース
- 16340 (700mAh) 搭載
含まれるもの
- 1 x RoverC-Pro
- 1 x グリッパーキット
アプリケーション
- ミニ偵察車
- 小型移動ロボット
- 知能玩具
仕様
| 仕様 | パラメータ |
|---|---|
| MCU | STM32F030C8T6 |
| 通信プロトコル | I2C:0x38 |
| 製品サイズ | 120.0 x 75.0 x 58.0mm |
| 製品重量 | 169.3g |
| 梱包サイズ | 115.0 x 85.0 x 65.0mm |
| 総重量 | 245.0g |
ピンマップ
| M5StickC | G26 | G0 | 5V | GND |
|---|---|---|---|---|
| RoverC HAT | SCL | SDA | 5V | GND |
| I2C① | SCL | SDA | 5V | GND |
| I2C② | SCL | SDA | 5V | GND |
構造
ソフトウェア
Arduino
1: この例は RoverC と JoyC を使用し、UDP 通信で無線制御を実現します。使用するデバイスに応じて以下のサンプルプログラムを選択してください。
注意:起動後、RoverC は「M5AP+2 バイト MAC アドレス」という SSID 名を表示し、JoyC がこれをスキャンします。JoyC 上の M5StickC の Home ボタンを 3 秒長押しすると車両のホットスポットをスキャンし、ペアリングが可能です。成功すると画面左上にリンクアイコンが表示され、ジョイスティックの値が表示されます。左スティックの上下で前後、左右で平行移動、右スティック左右で旋回操作を行います。
2: この例は RoverC を単体で制御するプログラムです。メインコントローラから直接制御します。使用するデバイスに応じて以下を選択してください。
UiFlow1
通信プロトコル
通信タイプ:I2C
I2C アドレス: 0x38
Easyloader
| Easyloader | ダウンロードリンク | 備考 |
|---|---|---|
| RoverC-Pro Easyloader | download | / |
動画
製品比較
| 製品比較 | RoverC PRO  | RoverC 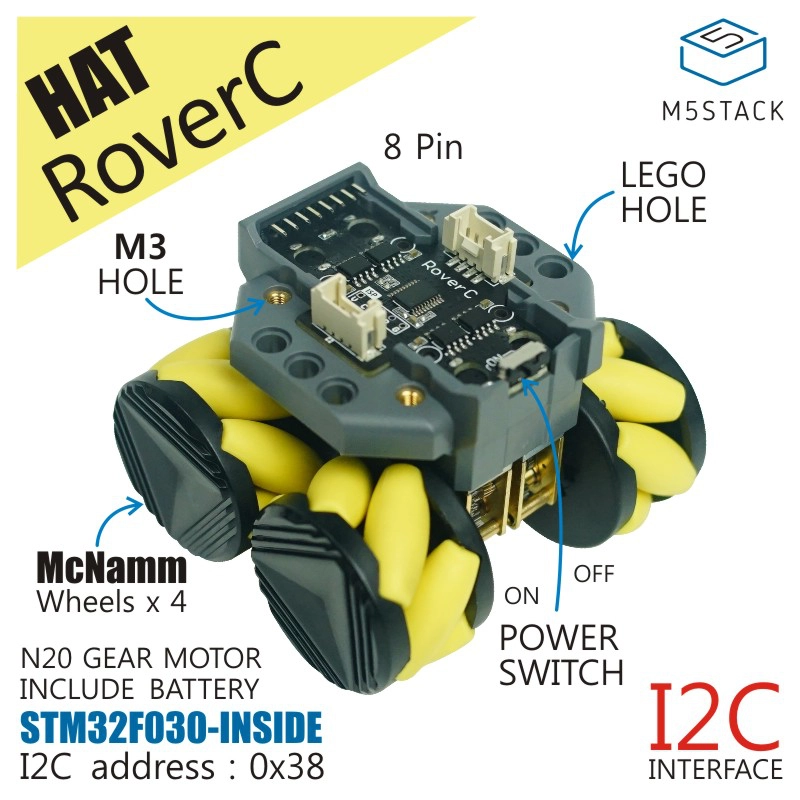 |
|---|---|---|
| サーボグリッパー | x1 | / |
| サーボ拡張インターフェース | x2 | / |
| バッテリー | 取り外し可能 | 取り外し不可 |