























RoverC
SKU:K036








Description
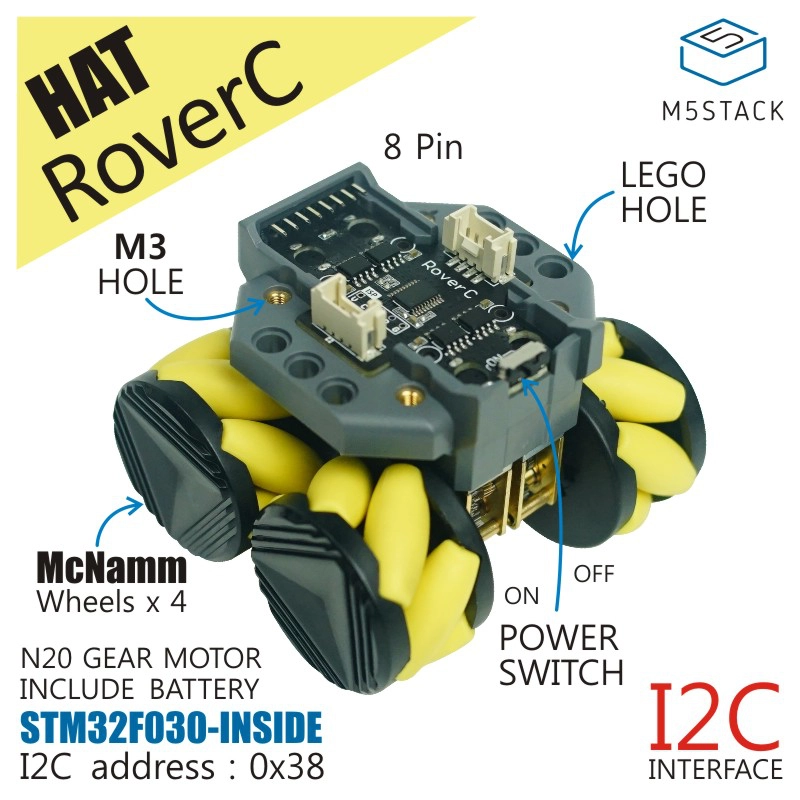
RoverC is a programmable Mecanum wheel omnidirectional mobile robot base compatible with M5StickC. Simply insert the M5StickC to get started. The main control chip is STM32F030F4, with 4 N20 worm gear motors driven directly by motor drivers, enabling the Mecanum wheels to move omnidirectionally. Additionally, it provides 2 Grove-compatible I2C connectors for easy expansion with other modules. The base is compatible with LEGO holes, allowing for structural expansion. The back of the base is equipped with an 18350 (900mAh) battery, controlled by an independent switch, meeting the power and endurance needs of the car.
Features
- I2C Communication (0x38)
- Programmable Robot
- Remote Control
- Four Motor Drivers
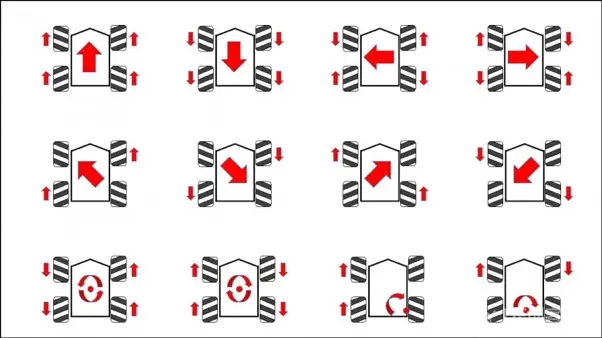
- Omnidirectional Movement
- Equipped with 18350 Battery Base
- Flexible Movement
Includes
- 1 x RoverC
Applications
- Small Mobile Robots
- Remote Control
- Smart Toys
Specifications
| Specification | Parameter |
|---|---|
| MCU | STM32F030F4P6 |
| Communication Protocol | I2C:0x38 |
| Net Weight | 213g |
| Gross Weight | 217g |
| Product Size | 75 x 75 x 55mm |
| Package Size | 115 x 85 x 65mm |
Operating Instructions
PinMap
| M5StickC | G26 | G0 | 5V | GND |
|---|---|---|---|---|
| RoverC HAT | SCL | SDA | 5V | GND |
| I2C① | SCL | SDA | 5V | GND |
| I2C② | SCL | SDA | 5V | GND |
Softwares
Arduino
1: This example uses RoverC and JoyC to achieve wireless control through UDP communication. Please choose the corresponding example program below according to your device.
Note: After powering on, RoverC will display the hotspot name "M5AP+2-byte MAC address", and JoyC will scan for RoverC's MAC address name. Long press the Home button on JoyC's M5StickC for 3 seconds to start scanning for the car's hotspot, and pairing will be successful. Once paired, the link icon will be highlighted in the top left corner of the screen, and the joystick values will be displayed on the screen. The left joystick controls forward and backward movement, and left and right strafing, while the right joystick controls turning.
2: This example is a standalone control program for RoverC, controlled directly by the main controller. Please choose the corresponding example program below according to your device.
UiFlow1
Protocol
Communication Type: I2C
I2C Communication Address: 0x38
Easyloader
| Easyloader | Download Link | Note |
|---|---|---|
| RoverC-Pro Easyloader | download | / |
Video
Version Change
| Release Date | Product Changes | Note |
|---|---|---|
| 2019.11 | Initial Release | / |
| 2020.5 | Battery model changed from 16340 (750mAh) to 18350 (900mAh) | / |