

Unit Joystick
SKU:U024






Description
Unit Joystick is a joystick control input unit that uses an I2C communication interface and supports three-axis control signal input (X/Y axis analog input, Z axis button digital input). It is suitable for applications such as gaming and robot control.
Features
- Three-axis input:
- X/Y axis analog input
- Z axis button digital input
- 2 x LEGO-compatible holes
- Development platforms: Arduino, UIFlow (Blockly, Python)
Includes
- 1 x Unit Joystick
- 1 x HY2.0-4P Grove cable (20cm)
Applications
- Game controller
- Robot remote control
Specifications
| Specification | Parameter |
|---|---|
| Communication protocol | I2C:0x52 |
| X, Y axis output value | 0-255 |
| Z axis button output | 0/1 |
| Net weight | 11g |
| Gross weight | 27g |
| Product Size | 48 x 24 x 32mm |
| Package Size | 75 x 45 x 30mm |
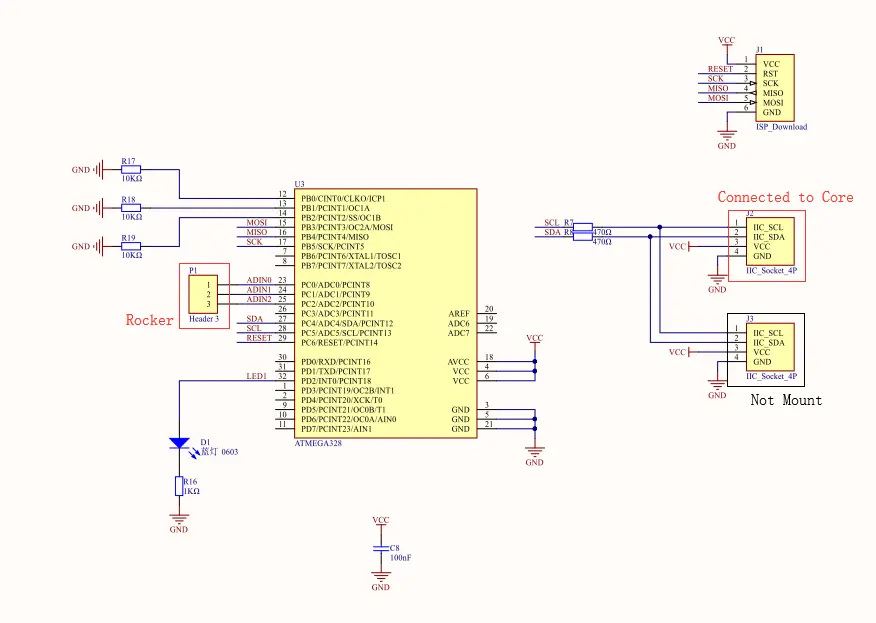
Schematics
PinMap
Unit Joystick
| HY2.0-4P | Black | Red | Yellow | White |
|---|---|---|---|---|
| PORT.A | GND | 5V | SDA | SCL |
Softwares
Arduino

UiFlow1
UiFlow2
Protocol
- Protocol type: I2C
- I2C Address: 0x52
JOYSTICK REG 0x52
| REG | len | description | return values |
|---|---|---|---|
| 0x52 | 3 | Read joystick status | [0] X VALUE [1] Y VALUE [2] BTN STATUS |
EasyLoader
| Easyloader | Download Link | Notes |
|---|---|---|
| Unit Joystick Easyloader | download | / |
Video
- Displaying joystick XY data and button status.