
Unit RollerCAN
SKU:U188










Description
Unit RollerCAN is an integrated brushless DC motor motion control kit designed for efficient motion control. It features two power input methods, supporting 6-16V DC power input through the CAN (XT30) interface and 5V input through the Grove interface, with automatic adjustment of power coefficients to ensure optimal performance.
This kit includes a built-in FOC closed-loop drive system, equipped with a 3504 200KV brushless motor. Without forced cooling, the maximum continuous phase current is 0.5A, and the phase current can reach 1A for short periods. The driver uses a magnetic encoder feedback mechanism to achieve three-loop control of current, speed, and position, ensuring precise control. The device's axis features an optional electrical slip ring configuration, allowing the top Grove interface to remain connected to the bottom even during 360° rotation, enabling the expansion of additional modules on top while maintaining power and data transmission for the rotating part.
Additionally, the device's back is equipped with a 0.66-inch OLED display for real-time status monitoring. It also includes built-in RGB indicators and functional buttons for convenient human-machine interaction. The product's top and base designs include LEGO-compatible mounting holes and M3 screw holes for quick assembly and integration.
Unit RollerCAN is fully open-source in both hardware and software, supporting motion control and parameter adjustment via CAN or I2C buses. It also provides SWD and SWO debugging interfaces, further enhancing flexibility for developers. This product is used in various fields such as robotic joints, motion control, industrial automation, and visual demonstration projects.
Learn
Features
- Brushless DC motor control
- CAN/I2C communication control
- Integrated OLED display
- RGB indicators
- FOC closed-loop drive system
- Slip ring
Includes
- 1 x Unit RollerCAN
- 1 x PwrCAN Cable (10cm)
- 2 x HY2.0-4P Grove cables (5cm)
- 6 x Friction pins
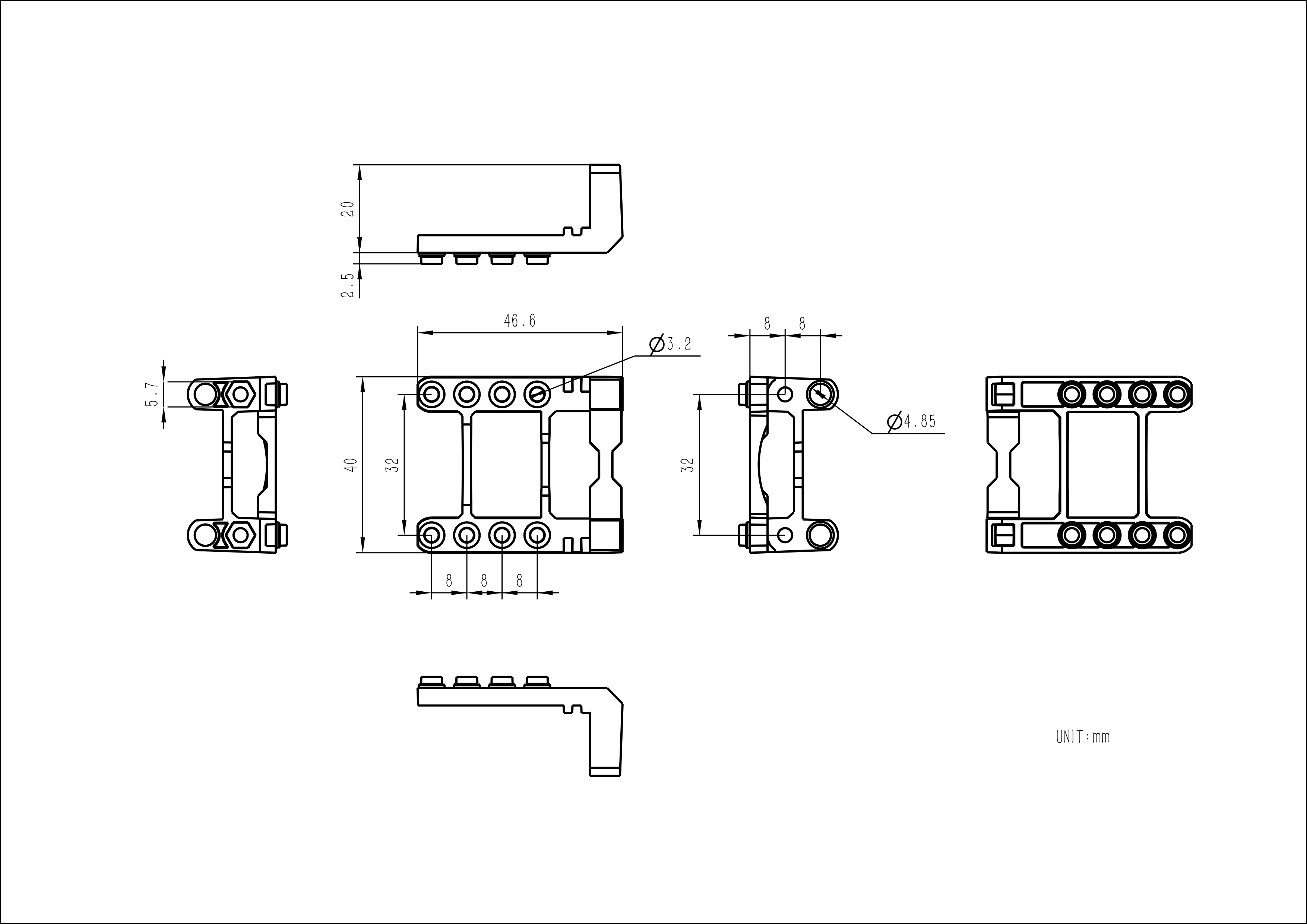
- 1 x Flange plate
- 1 x Bracket
- 1 x Hex key (2.5mm)
- 1 x Hex key (2mm)
- 6 x M3 nuts
- 2 x Hex socket head M3x14mm screws
- 4 x Hex socket countersunk M3x14mm screws
- 4 x Hex socket countersunk M3x12mm screws
- 1 x Single-ended terminal cable 5P debugging cable 1.25mm pitch 100mm length
Applications
- Robotic joint control
- Smart manufacturing equipment
- Visual demonstrations
Specifications
| Specification | Parameters |
|---|---|
| MCU | STM32G431CBU6@Cortex-M4, 128KB-Flash, 32KB-SRAM, 170MHz |
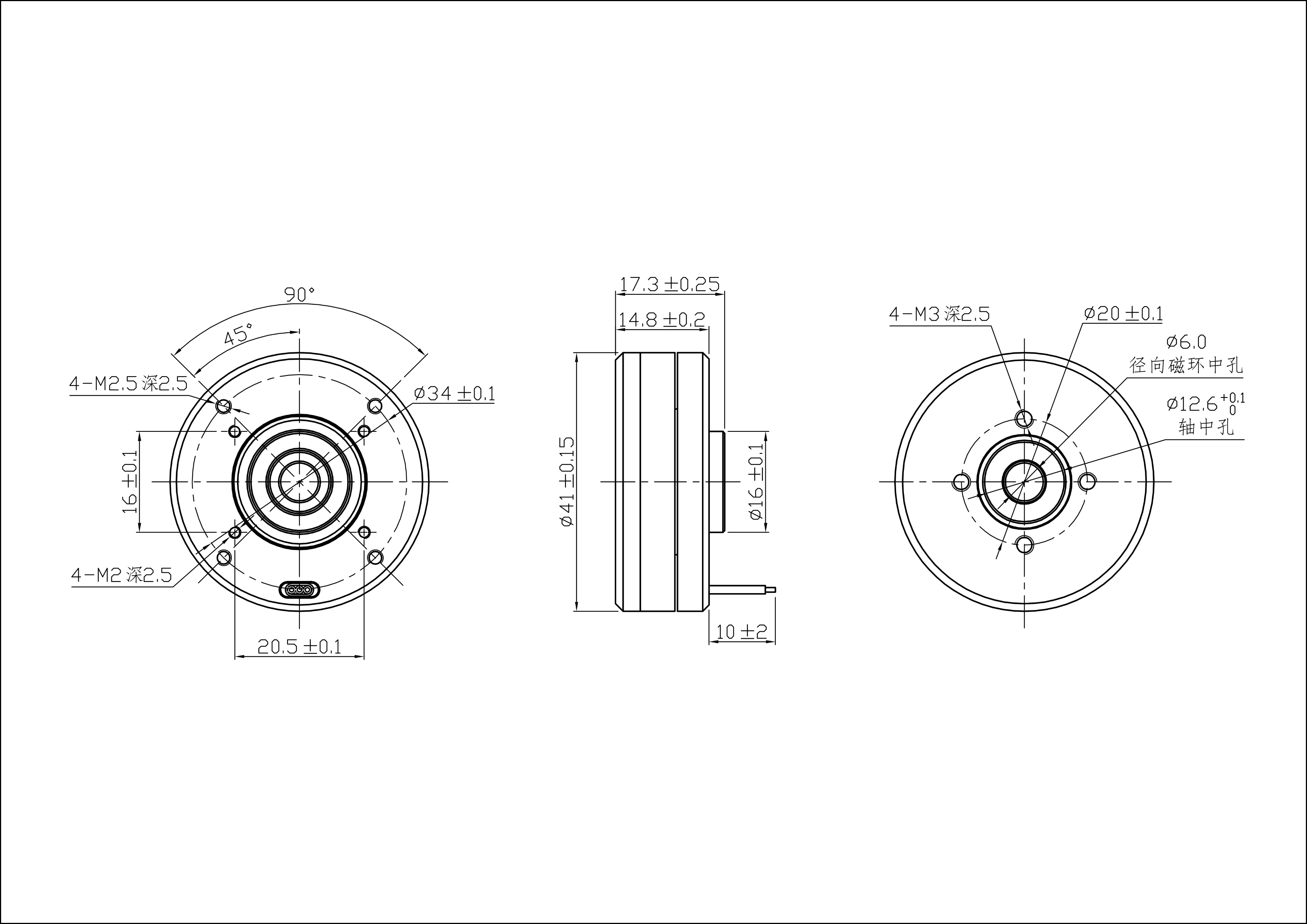
| Motor Type | D3504 200KV brushless motor@Diameter: 41mm |
| Driver Chip | DRV8311HRRWR |
| Angle Sensor | TLI5012BE1000 |
| Communication Interface | 2x CAN (XT30 interface) @XT30 (2+2) PW-M 2x I2C (0x64) |
| Display | 0.66-inch OLED display, resolution: 64 x 48, SPI communication |
| RGB LEDs | 2x WS2812-2020 |
| Motor Power Supply | CAN (XT30 interface) @6-16V power supply Grove port DC 5V power supply Slip ring_Grove port DC 5V power supply |
| Load | Load: 50g Motor speed: 2100rpm Current: DC 16V/225mA Load: 200g Motor speed: 1400rpm Current: DC 16V/601mA Load: 500g (Maximum load) Motor speed: 560rpm Current: DC 16V/918mA No load: DC 16V/78mA |
| Standby Current | Grove port DC 5V power supply@70mA CAN (XT30 interface) power supply DC 16V@32mA |
| Output Torque | Grove port DC 5V power supply: 0.021N.m/0.2kgf.cm@current 350mA CAN (XT30 interface) DC 16V power supply: 0.065N.m/0.66kgf.cm@current 927mA |
| Slip Ring (Grove port) Output Capacity | DC 5V/300mA |
| Noise | 48dB |
| Operating Temperature | 0 ~ 40°C |
| Product Size | 40.0 x 40.0 x 40.0mm |
| Product Weight | 84.6g |
| Package Size | 105.0 x 76.0 x 54.0mm |
| Gross Weight | 158.3g |
Learn
Schematics
PinMap
Unit RollerCAN
| HY2.0-4P | Black | Red | Yellow | White |
|---|---|---|---|---|
| PORT.A | GND | 5V | SDA | SCL |
I2C, CAN, RGB, Button
| STM32G431CBU6 | PA15 | PB7 | PA11 | PA12 | PB4 | PB5 | PC6 |
|---|---|---|---|---|---|---|---|
| I2C | SYS_I2C_SCL | SYS_I2C_SDA | |||||
| CAN | FDCAN_RX | FDCAN_TX | CAN_STB | ||||
| WS2812C | LED_DAT | ||||||
| Button A | SYS_SW |
OLED
| STM32G431CBU6 | PB15 | PB13 | PB14 | PB11 | PB12 |
|---|---|---|---|---|---|
| OLED | OLED_MOSI | OLED_SCK | OLED_DC | OLED_RST | OLED_CS |
Model Size
Datasheets
Softwares
Arduino
Internal Firmware
Communication Protocols
I2C Protocol
CAN Protocol
UiFlow2
Video
- Unit RollerCAN Product Introduction and Case Demonstration
Product Comparison
| Product Comparison | Unit RollerCAN | Unit RollerCAN Lite  | Unit Roller485  | Unit Roller485 Lite  |
|---|---|---|---|---|
| Driver Chip | DRV8311 | DRV8311 | DRV8311 | DRV8311 |
| Communication Method | CAN/I2C | CAN/I2C | RS485/I2C | RS485/I2C |
| Slip Ring | With slip ring | Without slip ring | With slip ring | Without slip ring |
| Power Indicator LED Color | Blue | None | Green | None |
| Product Color | Black | Black | Gray | Gray |