

StackFlow AI Platform
设备开发 & 快速上手
模型介绍
Qwen3
DeepSeek-R1
AI Pyramid 应用案例
Module LLM 应用案例
CV 视觉应用
VLM 多模态
LLM 大语言模型
语音助手
LLM630 Compute Kit - StackFlow API Yolo11n Visual Demo
本案例将演示通过在 PC 端上运行脚本程序,通过 StackFlow 的 API 接口获取 yolo 的检测数据,并启动预览窗口实时查看检测情况。
1. 准备工作
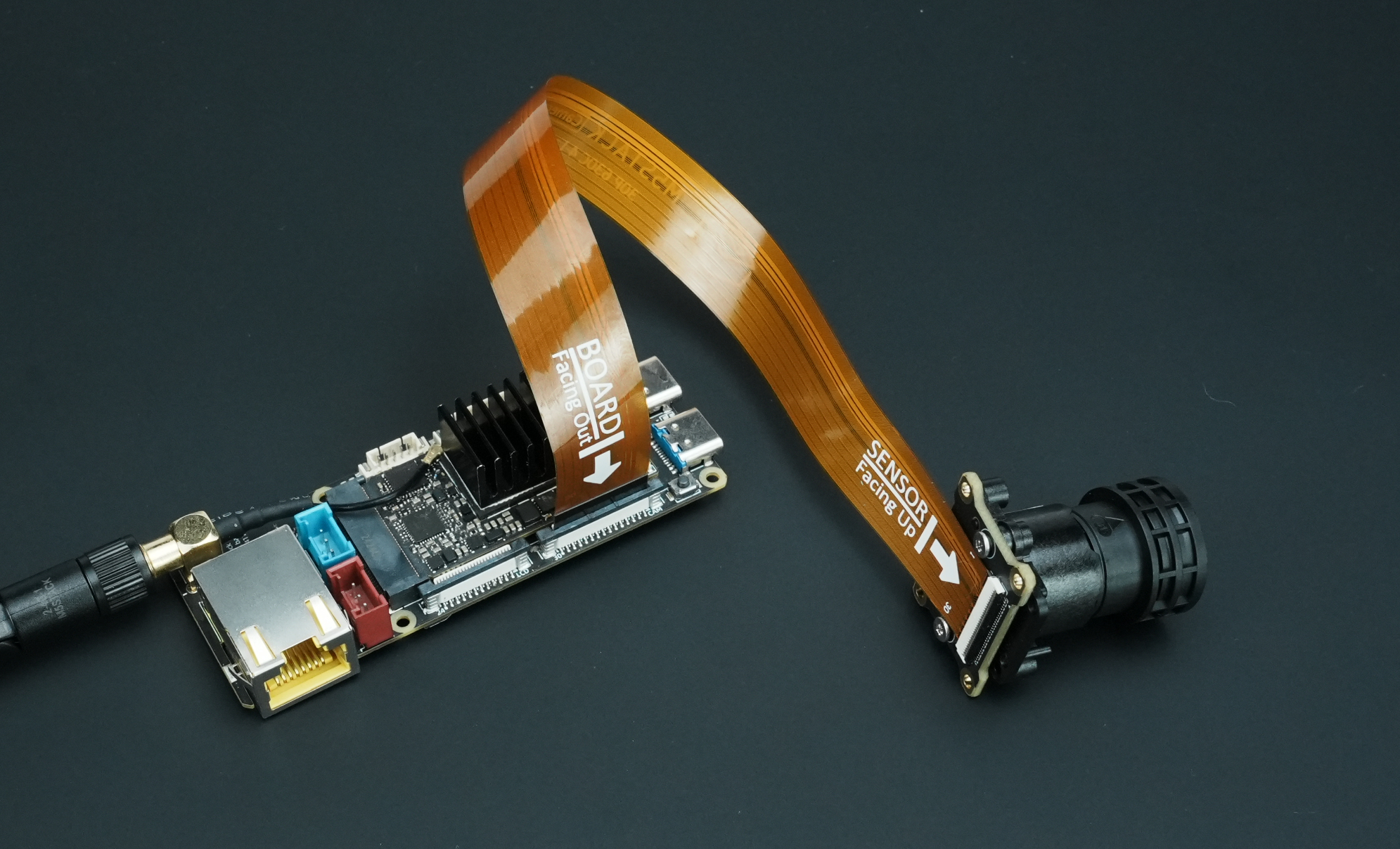
- 按照下图接线方式,在设备上电前通过 FPC 排线连接 CamModule SC850SL 摄像头 和 LLM630 Compute Kit
- 参考LLM630 Compute Kit UART / ADB / SSH 连接调试教程,学习如何为 LLM630 Compute Kit 配置网络与文件传输,并获取设备 IP 地址。
- 参考LLM630 Compute Kit 软件包更新教程,完成以下模型包和软件包的安装。
apt install llm-camera llm-yolo # SoftWare Package注意事项
CSI Camera 使用了 AI-ISP,在暗光下有非常好的成像效果,会使用一半的 NPU 算力用于 AI-ISP。默认的 YOLO 模型无法在开启 AI-ISP 模式下使用,需要通过以下命令安装支持 AI-ISP 的 YOLO 模型。
apt install llm-model-yolo11n-npu1 llm-model-yolo11n-pose-npu1 llm-model-yolo11n-hand-pose-npu1 # Model Package2. 客户端程序
下载客户端测试脚本,确保 PC 与 LLM630 Compute Kit 处于同一网段下。PC 端需准备 Python 环境并通过 Pip 包管理器安装 opencv-python 和 tornado 依赖包。
pip install opencv-python tornadopip install opencv-python tornado -i https://mirrors.aliyun.com/pypi/simple # For Chinese users复制并保存下方脚本,并运行时候传入设备实际的 IP 地址参数。
python llm-yolo-visual.py --host 192.168.20.24import argparse
import base64
import cv2
import json
import numpy as np
import select
import socket
import sys
import time
import threading
import tornado.ioloop
import tornado.web
import platform
if platform.system() == "Windows":
import msvcrt
latest_frame = [None]
COCO_KP_PAIRS = [
(0, 2), (2, 4), (0, 1), (1, 3),
(6, 5), (6, 8), (8, 10), (5, 7),
(7, 9), (12, 11), (6, 12), (12, 14),
(14, 16), (5, 11), (11, 13), (13, 15)
]
COCO_COLORS = [
(255,0,0), (0,255,0), (0,0,255), (255,255,0),
(255,0,255), (0,255,255), (128,128,0), (128,0,128)
]
HAND_KP_PAIRS = [
(0, 1), (1, 2), (2, 3), (3, 4),
(0, 5), (5, 6), (6, 7), (7, 8),
(0, 17), (17, 18), (18, 19), (19, 20),
(5, 9), (9, 13), (13, 17),
(9, 10), (10, 11), (11, 12),
(13, 14), (14, 15), (15, 16)
]
HAND_COLORS = [
(255,0,0), (0,255,0), (0,0,255), (255,255,0),
(255,0,255), (0,255,255), (128,128,0), (128,0,128),
(0,128,128), (64,64,255), (255,64,64), (64,255,64)
]
class MJPEGHandler(tornado.web.RequestHandler):
def get(self):
self.set_header('Content-type', 'multipart/x-mixed-replace; boundary=frame')
while True:
if latest_frame[0] is not None:
ret, jpeg = cv2.imencode('.jpg', latest_frame[0])
if ret:
self.write(b'--frame\r\n')
self.write(b'Content-Type: image/jpeg\r\n\r\n')
self.write(jpeg.tobytes())
self.write(b'\r\n')
self.flush()
tornado.ioloop.IOLoop.current().add_callback(lambda: None) # yield to event loop
def start_webstream():
app = tornado.web.Application([
(r"/video_feed", MJPEGHandler),
])
app.listen(5000)
print("Tornado webstream started at http://localhost:5000/video_feed")
tornado.ioloop.IOLoop.current().start()
def create_tcp_connection(host, port):
sock = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
sock.connect((host, port))
return sock
def send_json(sock, data):
json_data = json.dumps(data, ensure_ascii=False) + '\n'
sock.sendall(json_data.encode('utf-8'))
recv_buffer = ""
def receive_response(sock):
global recv_buffer
while '\n' not in recv_buffer:
part = sock.recv(4096).decode('utf-8')
if not part:
break
recv_buffer += part
if '\n' in recv_buffer:
line, recv_buffer = recv_buffer.split('\n', 1)
return line.strip()
else:
line, recv_buffer = recv_buffer, ""
return line.strip()
def close_connection(sock):
if sock:
sock.close()
def create_init_data(response_format, device, enoutput, frame_height, frame_width, enable_webstream, rtsp):
return {
"request_id": "camera_001",
"work_id": "camera",
"action": "setup",
"object": "camera.setup",
"data": {
"response_format": "image.yuvraw.base64" if response_format =="yuv" else "image.jpeg.base64",
"input": device,
"enoutput": enoutput,
"frame_width": frame_width,
"frame_height": frame_height,
"enable_webstream": enable_webstream,
"rtsp": "rtsp.1280x720.h265" if rtsp == "h265" else "rtsp.1280x720.h264",
}
}
def parse_setup_response(response_data):
error = response_data.get('error')
if error and error.get('code') != 0:
print(f"Error Code: {error['code']}, Message: {error['message']}")
return None
return response_data.get('work_id')
def reset(sock):
sent_request_id = 'reset_000'
reset_data = {
"request_id": sent_request_id,
"work_id": "sys",
"action": "reset"
}
ping_data = {
"request_id": "ping_000",
"work_id": "sys",
"action": "ping"
}
send_json(sock, reset_data)
while True:
try:
send_json(sock, ping_data)
time.sleep(1)
except (BrokenPipeError, ConnectionResetError, OSError) as e:
return # Sock disconnection indicates reset is complete
def setup(sock, init_data):
sent_request_id = init_data['request_id']
send_json(sock, init_data)
while True:
response = receive_response(sock)
response_data = json.loads(response)
if response_data.get('request_id') == sent_request_id:
return parse_setup_response(response_data)
def exit_session(sock, deinit_data):
send_json(sock, deinit_data)
print("Exit")
def parse_inference_response(response_data):
error = response_data.get('error')
if error and error.get('code') != 0:
print(f"Error Code: {error['code']}, Message: {error['message']}")
return None
return {
"work_id": response_data.get("work_id"),
"object": response_data.get("object"),
"data": response_data.get("data")
}
def parse_yolo_result(data):
results = []
for item in data:
bbox = [float(x) for x in item.get('bbox', [])]
kps = [float(x) for x in item.get('kps', [])]
cls = item.get('class', '')
conf = float(item.get('confidence', 0))
results.append({
'bbox': bbox,
'class': cls,
'confidence': conf,
'kps': kps
})
return results
def draw_keypoints(frame, kps, num_points, colors):
for i in range(num_points):
x, y, s = int(kps[i*3]), int(kps[i*3+1]), kps[i*3+2]
if s > 0.05:
cv2.circle(frame, (x, y), 3, colors[i % len(colors)], -1)
def draw_lines(frame, kps, pairs, colors):
for idx, (i, j) in enumerate(pairs):
xi, yi, si = int(kps[i*3]), int(kps[i*3+1]), kps[i*3+2]
xj, yj, sj = int(kps[j*3]), int(kps[j*3+1]), kps[j*3+2]
if si > 0.05 and sj > 0.05:
cv2.line(frame, (xi, yi), (xj, yj), colors[idx % len(colors)], 2)
def main(args):
sock = create_tcp_connection(args.host, args.port)
frame_height, frame_width = args.imgsz
try:
print("Reset...")
reset(sock)
close_connection(sock)
sock = create_tcp_connection(args.host, args.port)
print("Setup Camera...")
init_data = create_init_data(
response_format = args.format,
enoutput=args.enoutput,
device=args.device,
frame_height=frame_height,
frame_width=frame_width,
enable_webstream=args.webstream,
rtsp=args.rtsp
)
camera_work_id = setup(sock, init_data)
if camera_work_id is not None:
print(f"Camera setup with work_id: {camera_work_id}")
else:
print("Camera setup failed.")
return
print("Setup Yolo...")
yolo_init_data = {
"request_id": "yolo_001",
"work_id": "yolo",
"action": "setup",
"object": "yolo.setup",
"data": {
"model": args.model,
"response_format": "yolo.box",
"input": camera_work_id,
"enoutput": True,
}
}
yolo_work_id = setup(sock, yolo_init_data)
if yolo_work_id is not None:
print(f"Yolo setup with work_id: {yolo_work_id}")
else:
print("Yolo setup failed.")
return
yolo_results = []
webstream_thread = None
if args.webstream:
webstream_thread = threading.Thread(target=start_webstream, daemon=True)
webstream_thread.start()
while True:
if platform.system() == "Windows":
if msvcrt.kbhit():
key = msvcrt.getwch()
if key == 'q':
print("Quit by user.")
break
else:
if sys.stdin in select.select([sys.stdin], [], [], 0)[0]:
key = sys.stdin.readline().strip()
if key == 'q':
print("Quit by user.")
break
response = receive_response(sock)
if not response:
continue
response_data = json.loads(response)
Rawdata = parse_inference_response(response_data)
if Rawdata is None:
break
work_id = Rawdata.get("work_id")
object = Rawdata.get("object")
data = Rawdata.get("data")
if work_id == yolo_work_id and object == "yolo.box":
yolo_results = parse_yolo_result(data)
elif work_id == camera_work_id and object in ["image.jpeg.base64", "image.yuyv422.base64"]:
decoded = base64.b64decode(data)
if object == "image.yuyv422.base64" or args.format == "yuv":
yuv_frame = np.frombuffer(decoded, dtype=np.uint8).reshape((frame_height, frame_width, 2))
bgr_frame = cv2.cvtColor(yuv_frame, cv2.COLOR_YUV2BGR_YUY2)
else:
jpg_array = np.frombuffer(decoded, dtype=np.uint8)
bgr_frame = cv2.imdecode(jpg_array, cv2.IMREAD_COLOR)
if bgr_frame is not None:
if yolo_results:
for det in yolo_results:
x1, y1, x2, y2 = map(int, det['bbox'])
cls = det['class']
conf = det['confidence']
cv2.rectangle(bgr_frame, (x1, y1), (x2, y2), (0, 255, 0), 2)
cv2.putText(
bgr_frame, f"{cls} {conf:.2f}", (x1, y1 - 10),
cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2
)
kps = det.get('kps', [])
if not kps:
continue
if args.model == "yolo11n-pose-npu1" and len(kps) == 17 * 3:
draw_keypoints(bgr_frame, kps, 17, COCO_COLORS)
draw_lines(bgr_frame, kps, COCO_KP_PAIRS, COCO_COLORS)
elif args.model == "yolo11n-hand-pose-npu1" and len(kps) == 21 * 3:
draw_keypoints(bgr_frame, kps, 21, HAND_COLORS)
draw_lines(bgr_frame, kps, HAND_KP_PAIRS, HAND_COLORS)
if args.webstream:
latest_frame[0] = bgr_frame.copy()
if args.host not in ["localhost", "127.0.0.1"]:
cv2.imshow("YOLO Detection", bgr_frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cv2.destroyAllWindows()
exit_session(sock, {
"request_id": "yolo_exit",
"work_id": yolo_work_id,
"action": "exit"
})
exit_session(sock, {
"request_id": "camera_exit",
"work_id": camera_work_id,
"action": "exit"
})
time.sleep(3) # Allow time for the exit command to be processed
finally:
close_connection(sock)
if __name__ == "__main__":
parser = argparse.ArgumentParser(description="TCP Client to send JSON data.")
parser.add_argument("--host", type=str, default="localhost", help="Server hostname (default: localhost)")
parser.add_argument("--port", type=int, default=10001, help="Server port (default: 10001)")
parser.add_argument("--device", type=str, default="axera_single_sc850sl", help="Camera name, i.e. axera_single_sc850sl or /dev/video0")
parser.add_argument("--enoutput", type=bool, default=True, help="Whether to output image data")
parser.add_argument("--format", "--output-format", type=str, default="jpeg", help="Output image data format, i.e. jpeg or yuv")
parser.add_argument("--imgsz", "--img", "--img-size", nargs="+", type=int, default=[320, 320], help="image (h, w)")
parser.add_argument("--webstream", action="store_true", help="Enable webstream")
parser.add_argument("--rtsp", default="h264", help="rtsp output, i.e. h264 or h265")
parser.add_argument("--model", type=str, default="yolo11n-npu1", help="Model name, i.e. yolo11n-npu1 or yolo11n-pose-npu1, yolo11n-hand-pose-npu1")
args = parser.parse_args()
main(args)参数解析
- host:LLM630 Compute Kit 的 IP 地址
- port:TCP 通信端口,默认 10001
- device:摄像头名称,MIPI CSI 摄像头为 'axera_single_sc850sl',如果使用 USB video camera,根据实际设备填写。例如 '/dev/video0'
- enoutput:是否输出图像数据,默认关闭
- format:输出的图像格式,默认 'yuv',可以选择 'jpeg'
- imgsz:输出的图像尺寸,默认 '320*320'
- webstream:是否开启网页浏览,默认关闭,打开后,浏览器访问 'http://IP:8989/' 查看摄像头视频流,浏览器访问 'http://IP:5000/video_feed' 查看检测结果视频流,注意 IP 替换为 LLM630 Compute Kit 的 IP 地址
- rtsp:输出的 rstp 视频流编码,默认 'h264',可以选择 'h265'
- model:加载的 yolo 模型,默认 'yolo11n-npu1',可以选择 'yolo11n-pose-npu1' 或 'yolo11-hand-pose-npu1'
3. 开始交互
电脑屏幕将显示摄像头画面和检测结果,如下图所示。按下键盘按键 “q” 可退出。

Page Tools