LoRaWAN
Feature Description
Broadcast data to other LoRa devices in the same frequency band using the LoRaWAN module.
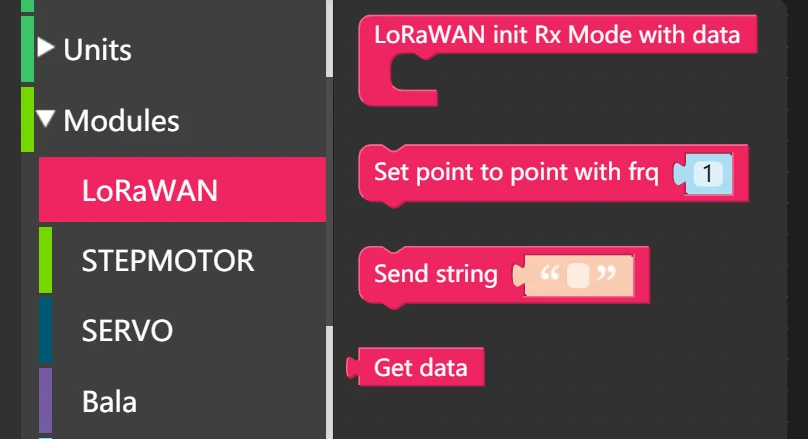
LoRaWAN init Rx Mode with data
Set the data receive callback.
Set point to point with frq
Set the communication frequency.
Send string
Send a message.
Get data
Get received data (used within the data receive callback).
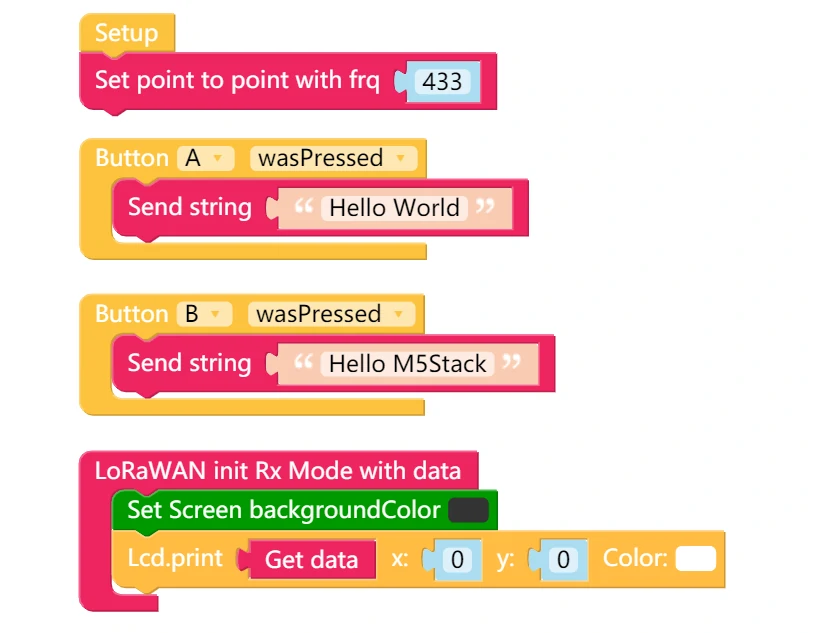
Usage
Press button A/B to send messages and listen for received data in real time.
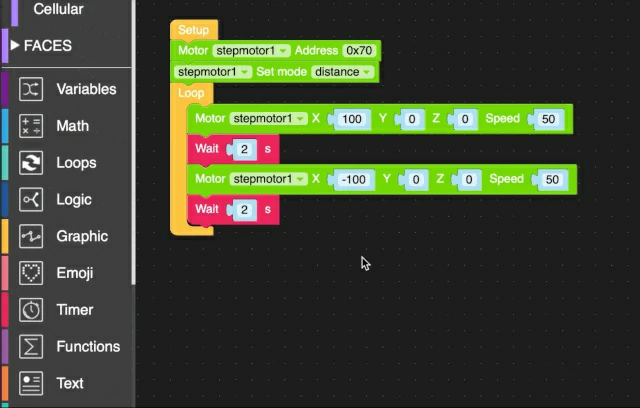
STEPMOTOR
Feature Description
Stepper motor control.
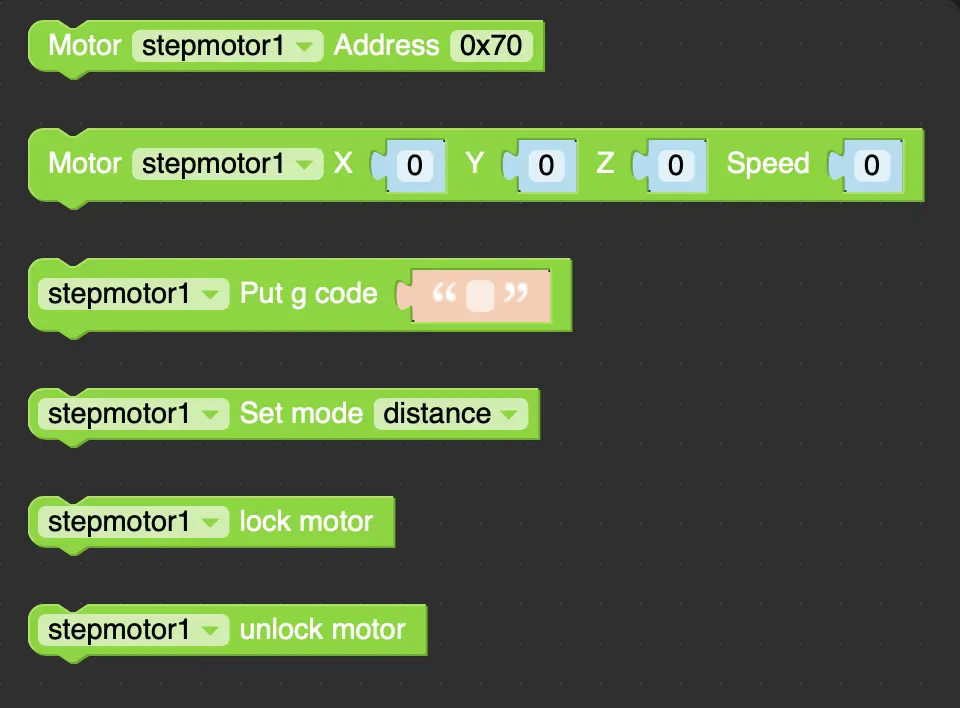
Motor Address
Module's I2C address.
Motor X Y Z Speed
Set the number of steps and speed for the stepper motor's X, Y, Z axes.
Put g code
Execute G-code.
Set mode
Set the motor operation mode, distance mode, or relative value mode.
lock motor
Lock the motor.
unlock motor
Unlock the motor.
Usage
Alternating forward and reverse motor operation.
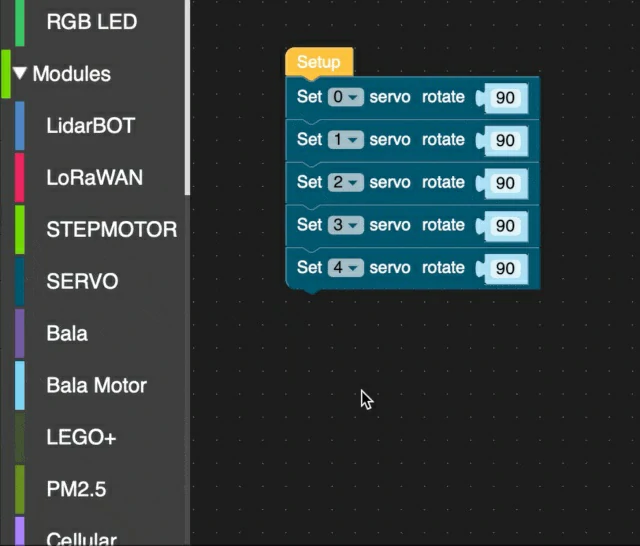
SERVO
Feature Description
Servo control.
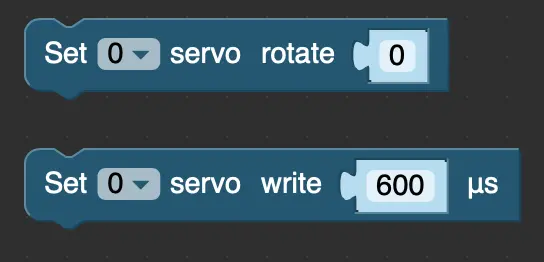
Set servo rotate
Set a specified servo angle.
Set servo write us
Set servo pulse time.
Usage
Control servos 0-5 to rotate 90 degrees.
Bala Motor
Feature Description
Control the Bala encoder motor operation.
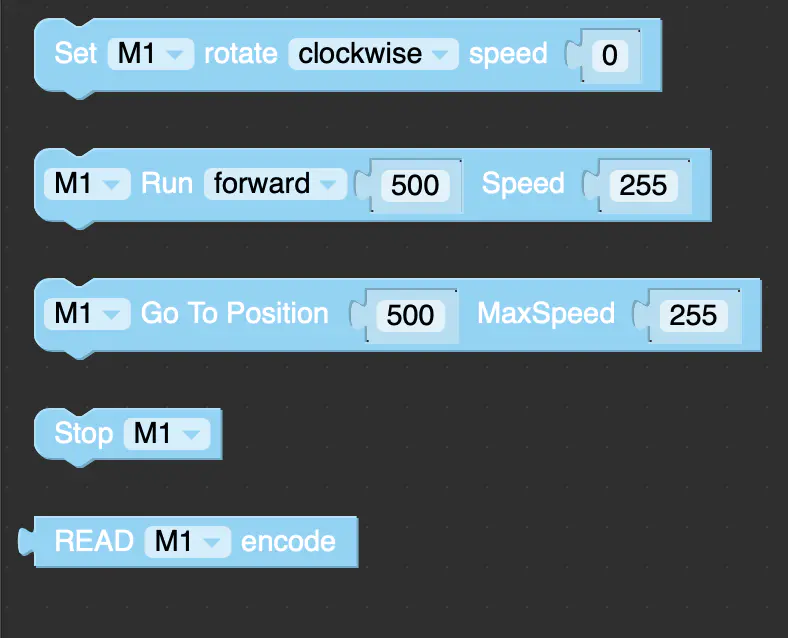
set rotate speed
Set motor rotation direction and speed.
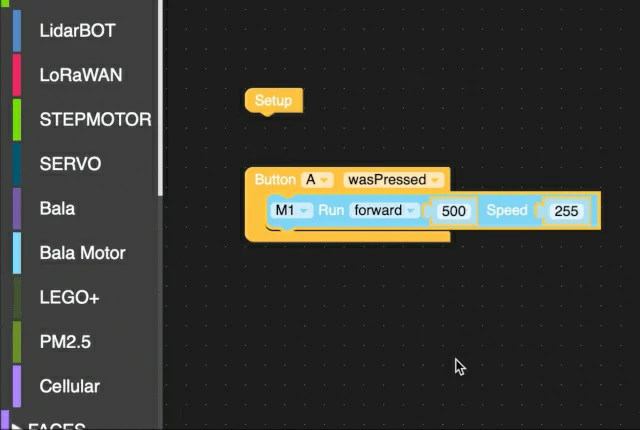
Run Speed
Set to walk in the direction of running at a certain speed for a certain number of pulses.
Go To Position MaxSpeed
Run 500 pulses at the set speed.
Stop
Stop the motor.
Read encode
Read the encoder value.
Usage
Press button A to walk forward 500 pulses at a speed of 255.
Bala
Feature Description
Control Bala operation.
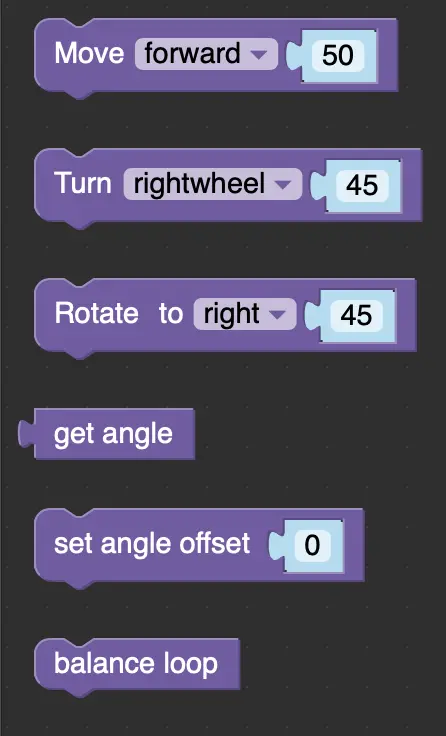
Move
Set motor rotation direction and speed.
Turn
Set the number of pulses for turning.
Rotate to
Set the degree of turning.
get angle
Return the current angle.
set angle offset
Set angle offset.
balance loop
Automatically balance.
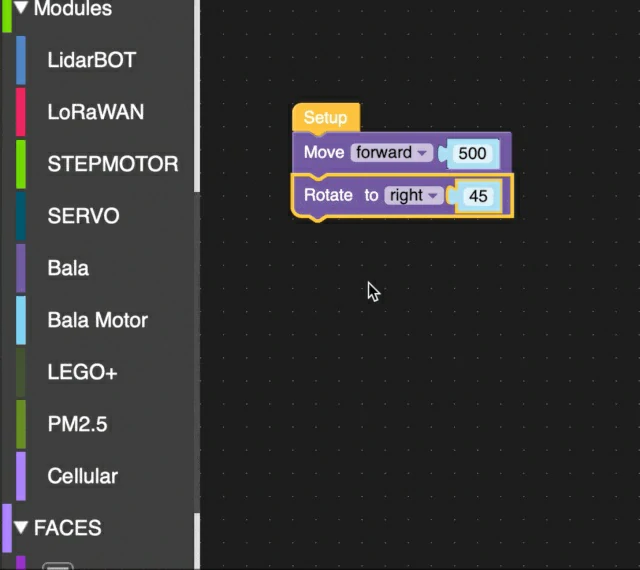
Usage
Bala moves forward 500 pulses and turns 45 degrees.
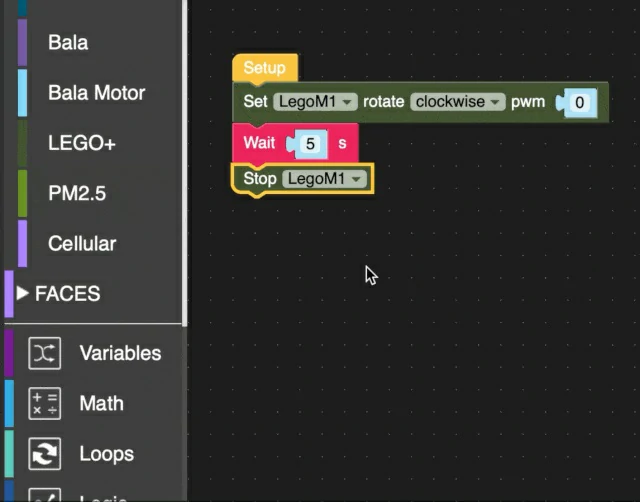
DC_MOTOR
Feature Description
Control the operation of the Lego encoder motor.
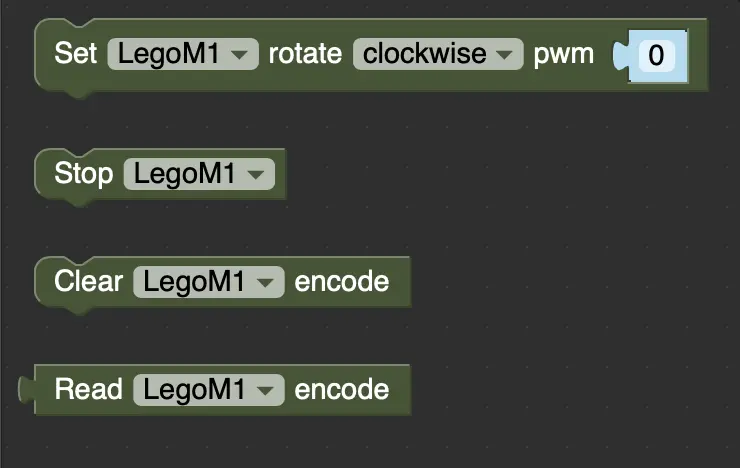
Set rotate pwm
Set motor direction and speed.
Stop
Stop the motor.
Clear encode
Reset the encoder.
Read encode
Read the encoder data.
Usage
Set the motor to run for 5 seconds and then stop.
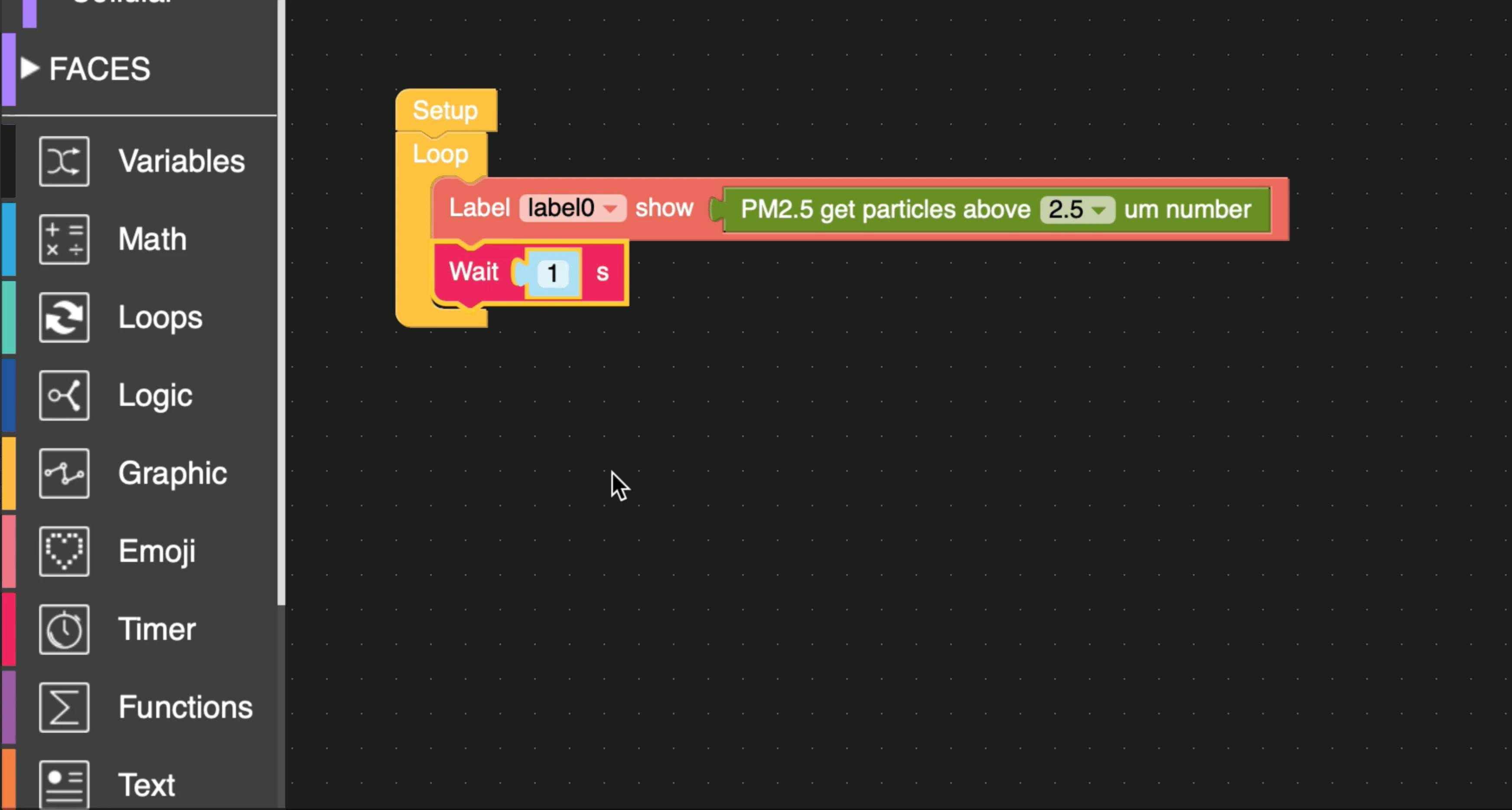
PM2.5
Feature Description
Detects dust particle matter, outputting concentration or number.
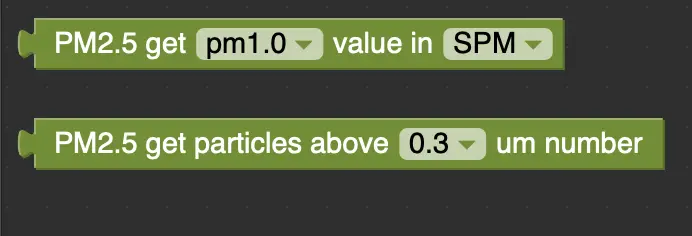
PM2.5 get value in
Set the particle diameter and detection mode, return the detection result. SPM is the standard particle concentration value, APM is the atmospheric environment particle concentration value.
PM2.5 get particles above um number
Return the number of particles of a specified diameter.
Usage
Display the number of PM2.5 particles on the screen.
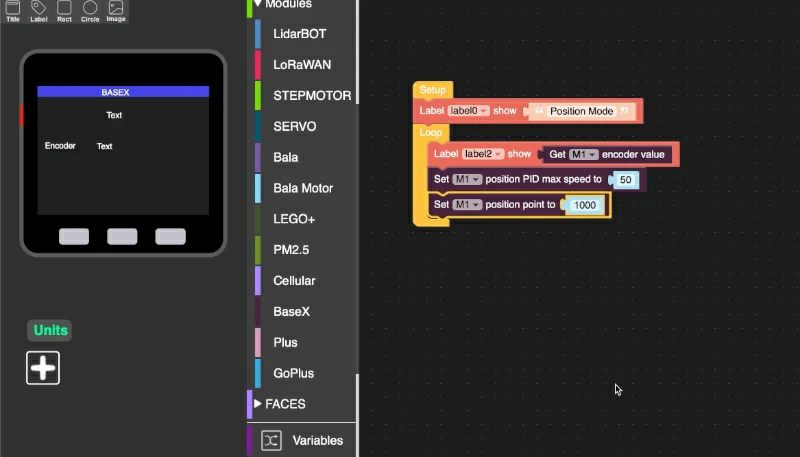
BaseX
Feature Description
BaseX
Feature Description
Controls LEGO motors and servos
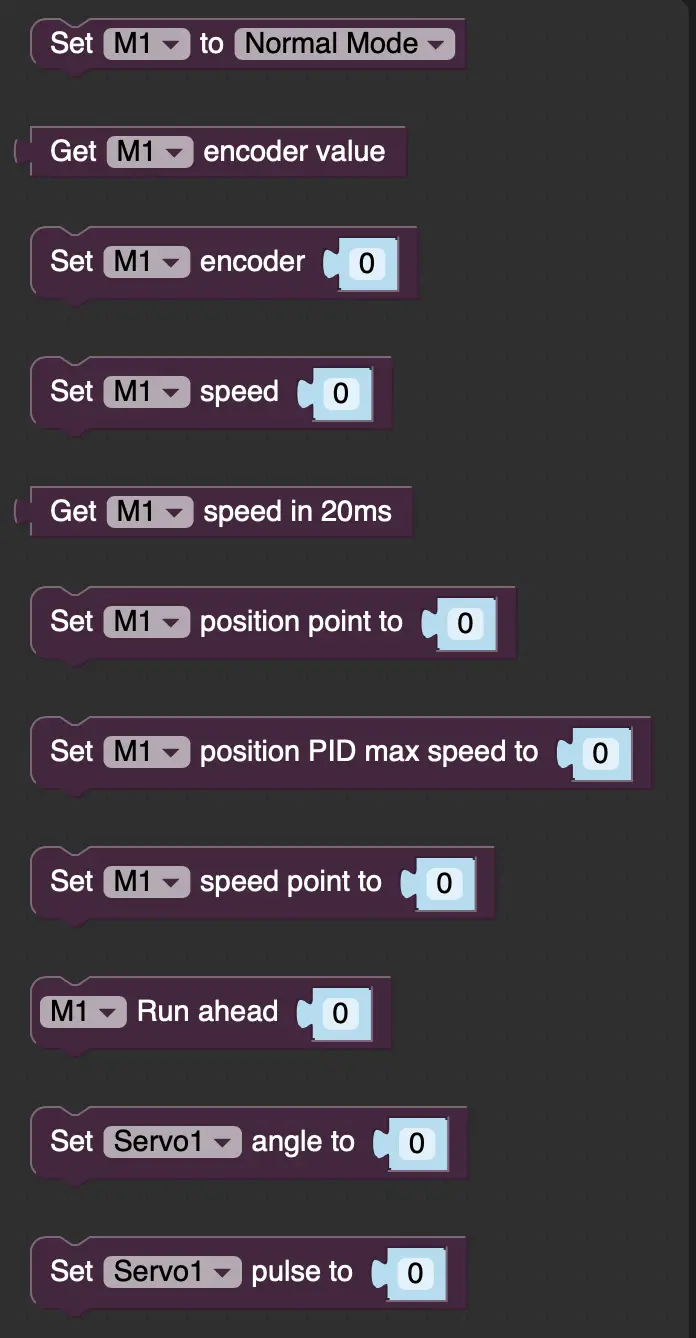
Set to Mode
Sets the motor mode (normal/position/speed).
Get encoder value
Retrieves the encoder value.
Set encoder
Sets the encoder value.
Set speed
Sets the motor speed (normal mode).
Get speed in 20ms
Retrieves the motor speed within 20ms.
Set position point to
Sets the motor position.
Set position PID max speed to
Sets the correction speed of the motor in position mode.
Set speed point to
Sets the motor speed (speed mode).
Run ahead
Moves forward to a specific position.
Set Servo angle to
Sets the servo angle.
Set Servo pulse to
Sets the servo pulse width.
Usage
Sets the motor to run at a speed of 50 for 1000 steps.
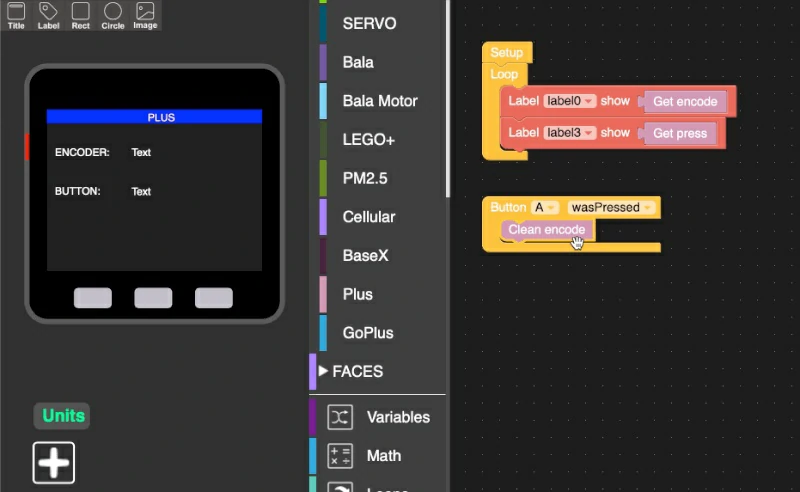
PLUS
Feature Description
Reads the encoder
Get encode
Reads the encoder value.
Clean encode
Resets the encoder value to zero.
Get press
Reads if the encoder button is pressed.
Usage
Displays the encoder status.
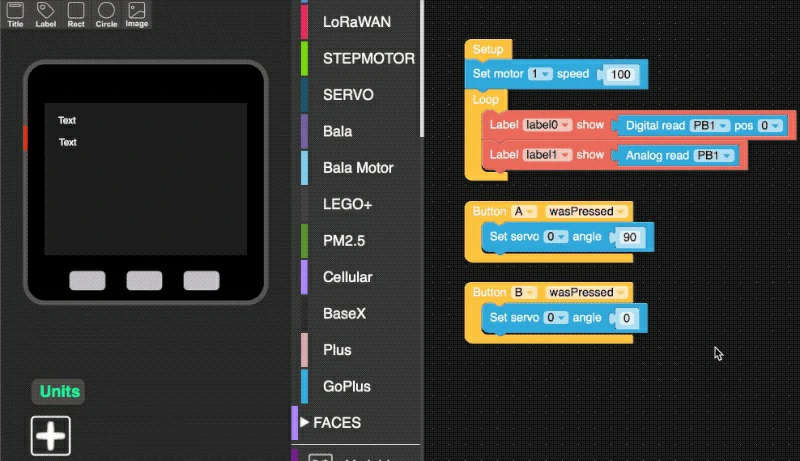
GoPlus
Feature Description
Controls DC motors and servos as well as reads analog and digital values
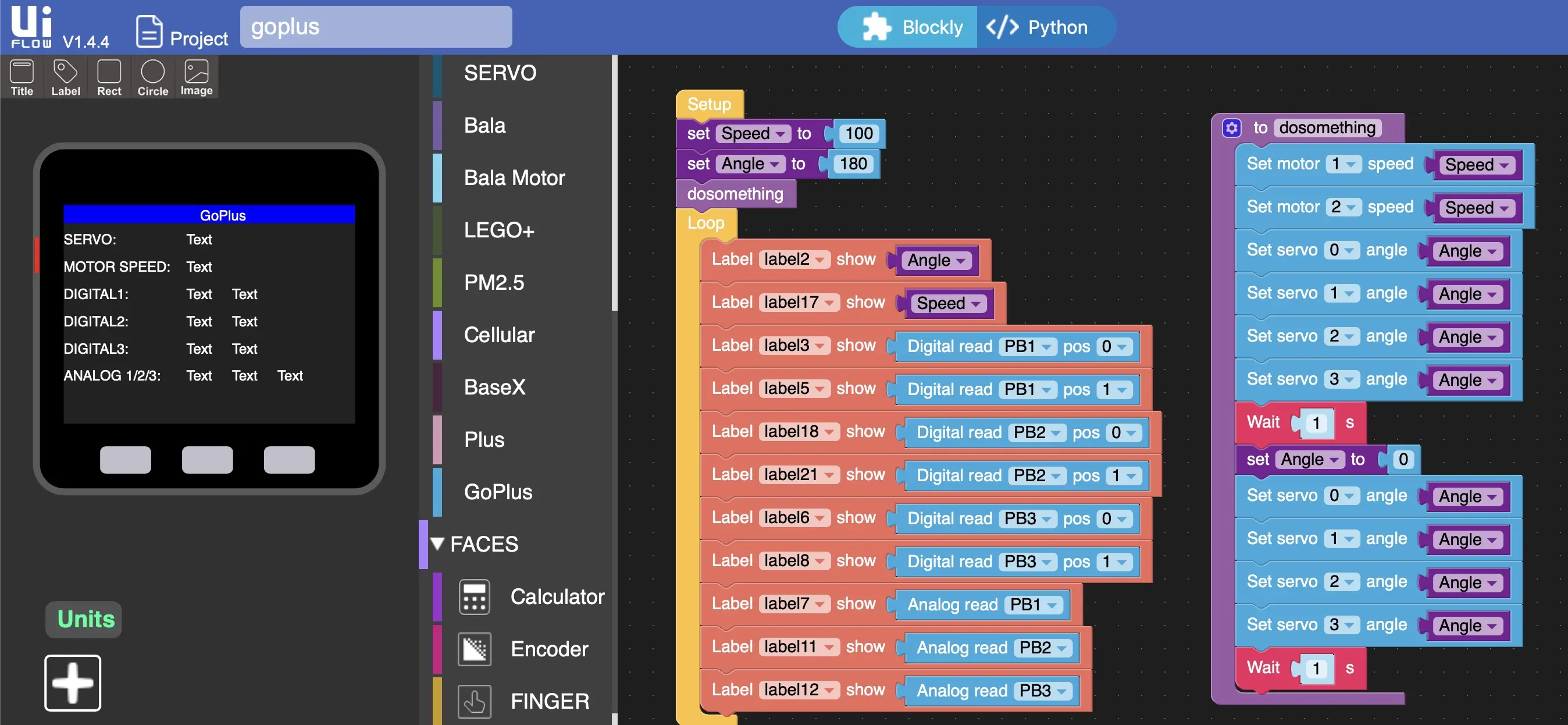
Set servo angle
Sets the servo angle.
Set motor speed
Sets the motor speed.
Digital read pos
Reads the digital value from a specified pin.
Analog read
Reads the analog value from a specified port.
Usage
Reads digital and analog values, controls servos and motors.
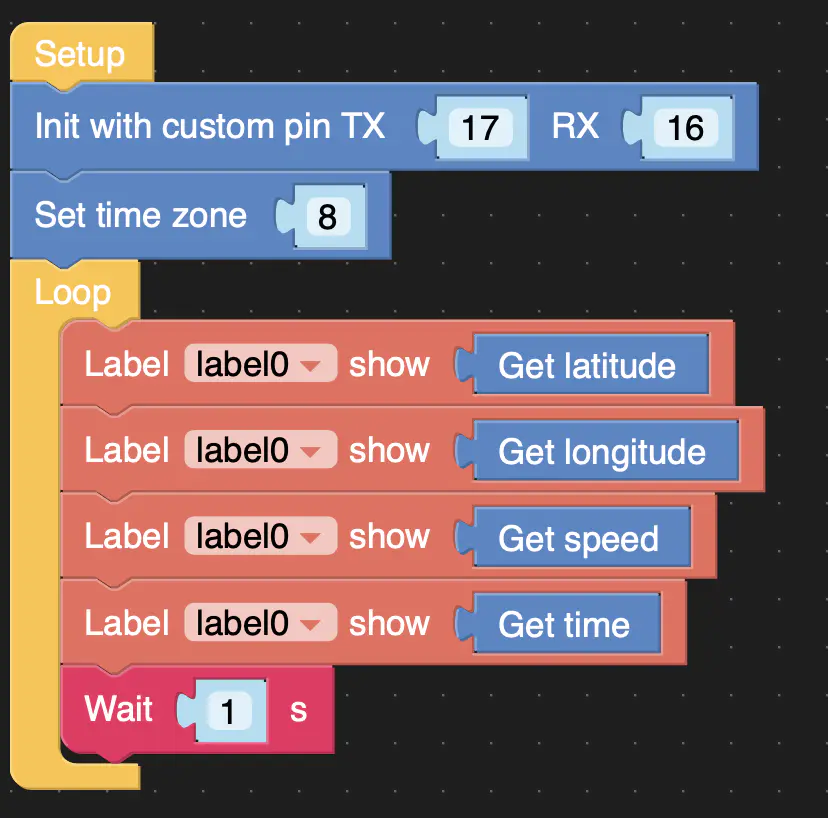
GPS
Feature Description
Retrieves GPS information
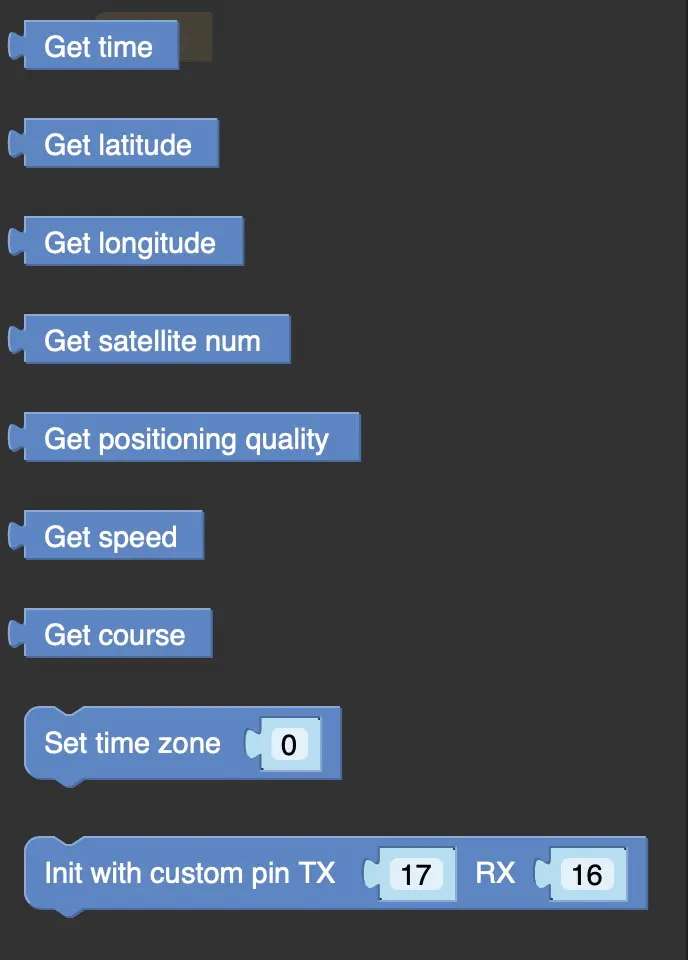
get time
Retrieves local time.
get latitude
Retrieves latitude.
get longitude
Retrieves longitude.
get satellite num
Retrieves the number of satellites found.
get positioning quality
Retrieves positioning accuracy.
get speed
Retrieves ground speed.
get course
Retrieves the geographic North Pole position.
set time zone
Sets the local timezone.
Usage
Displays GPS-related information on the screen.