产品上手指引
Linux PC
工业控制
大语言模型
实时 AI 语音助手
火山引擎语音助手
离线语音识别
Zigbee
IoT 云端服务
AWS IoT Core
Ethernet 摄像头
PoECAM
Wi-Fi 摄像头
Unit CamS3
AI 摄像头
电机驱动
网络设备
恢复出厂固件教程
Unit RollerCAN 使用教程
1. 设备供电
Unit RollerCAN 提供了以下两种供电方式选择:
- 通过 CAN (XT30 (2+2) PW-M) 接口进行供电:支持 6-16V@DC, 并集成 DC-DC 降压电路为控制器供电。
- 通过 Grove 接口进行供电: 5V@DC。


2. 设备配置
配置模式
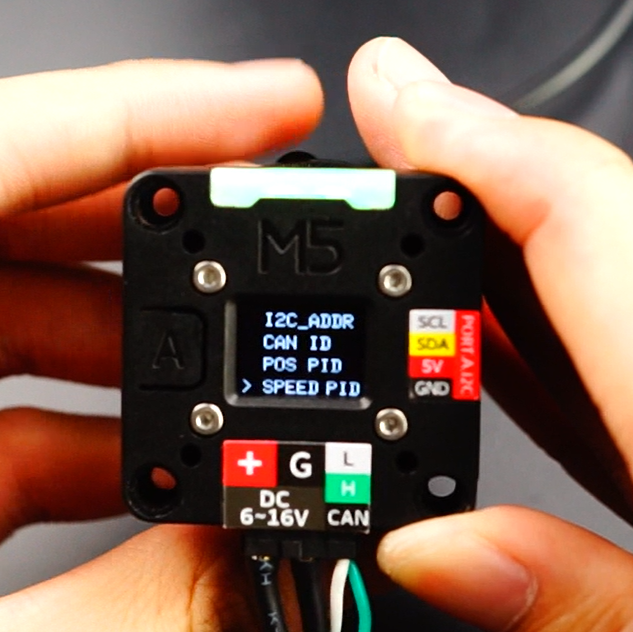
Unit-RollerCAN 集成了 OLED 和物理按键用于输入交互,在进行电机部署前,你可以根据使用的需求进行一些前期的配置。参考下方操作,进入配置模式。
- 1. 长按底部按键 A
- 2. 设备供电
- 3. 进入配置模式
- 4. 进入配置菜单后,旋转电机可切换选项,按下按键可进行选择 / 返回

通信模式
Unit-RollerCAN 目前提供以下几种不同的通信方式,用户可以根据实际部署的情况选择适合的通信接口和协议。
- I2C Mode: 该模式下,电机通过 I2C 通信接口进行控制
- CAN Mode: 该模式下,电机通过 CAN 通信接口进行控制
- CAN->I2C Mode: 该模式下,电机通过 CAN 通信接口进行控制,同时支持使用 CAN->I2C 转发指令,可通过转接实现 I2C 设备数据读写。

通信地址
- I2C ADDR: 配置 I2C 通信模式下,设备作为从机的 I2C 地址。
- CAN ID: 配置 CAN 通信模式下,设备通信所使用的 ID, 配置范围为 0-255, 默认值为 168 (0xA8)。

PID 预设
速度环与位置环模式的 PID 配置,根据不同的情况可以选择以下几种预设。不同的配置参数,对不同的使用场景进行了优化,推荐使用用户配置根据实际的情况进行微调。
- 默认用户配置
- 轻负载优化配置
- 中负载优化配置
- 高负载优化配置
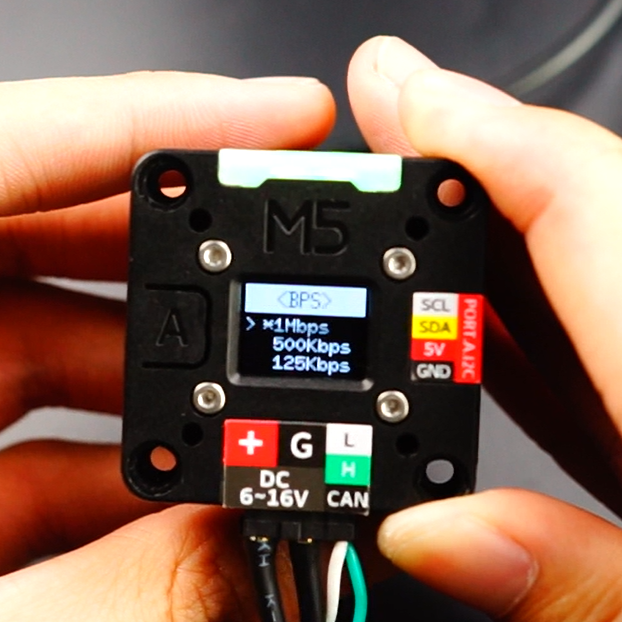
CAN 波特率配置
配置 CAN 通信模式下,设备通信的速率 (bps) 目前支持: 1M, 500K, 125K
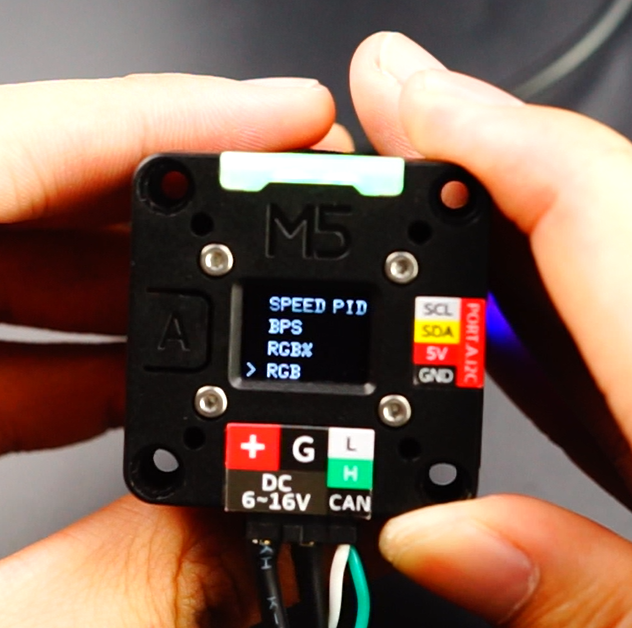
RGB 亮度
调节 RGB LED 的亮度:0-100%
RGB 工作模式
- 系统自动模式:根据当前电机运行状态切换颜色
- 绿色:Speed Mode
- 蓝色:Position Mode
- 黄色:Current Mode
- 紫色:Encoder Mode
- 红色:错误报警
- 用户模式:由用户自定义控制指示灯颜色
JAM
设置电机堵转保护,当电机发生堵转情况的时候,将自动锁定电机,防止设备损坏。
Range 保护
设置电机旋转范围保护。开启后当电机编码数值 <-2100000000 或> 2100000000 时,电机将停止旋转进入保护状态。
3. 电机工作模式
Unit Roller485 提供了 4 种工作模式,可通过通信指令进行配置 (参考页面底部案例程序与通信协议):
- Speed Mode (绿色): 控制电机运行在指定目标速度 (RPM)。

- Position Mode (蓝色): 控制电机转动至指定位置 (编码器数值)。
编码器数值与旋转角度
绝对位置模式下,编码器数值 36000 pos = 360° 。由于机械安装角度与编码器角度不是严格对应,因此实际可能存在大约 2° 左右误差。

- Current Mode (黄色): 控制电机运行在指定目标电流 (mA)。

- Encoder Mode (紫色状态灯): 电机作为输入设备,采集当前旋转编码器数值。

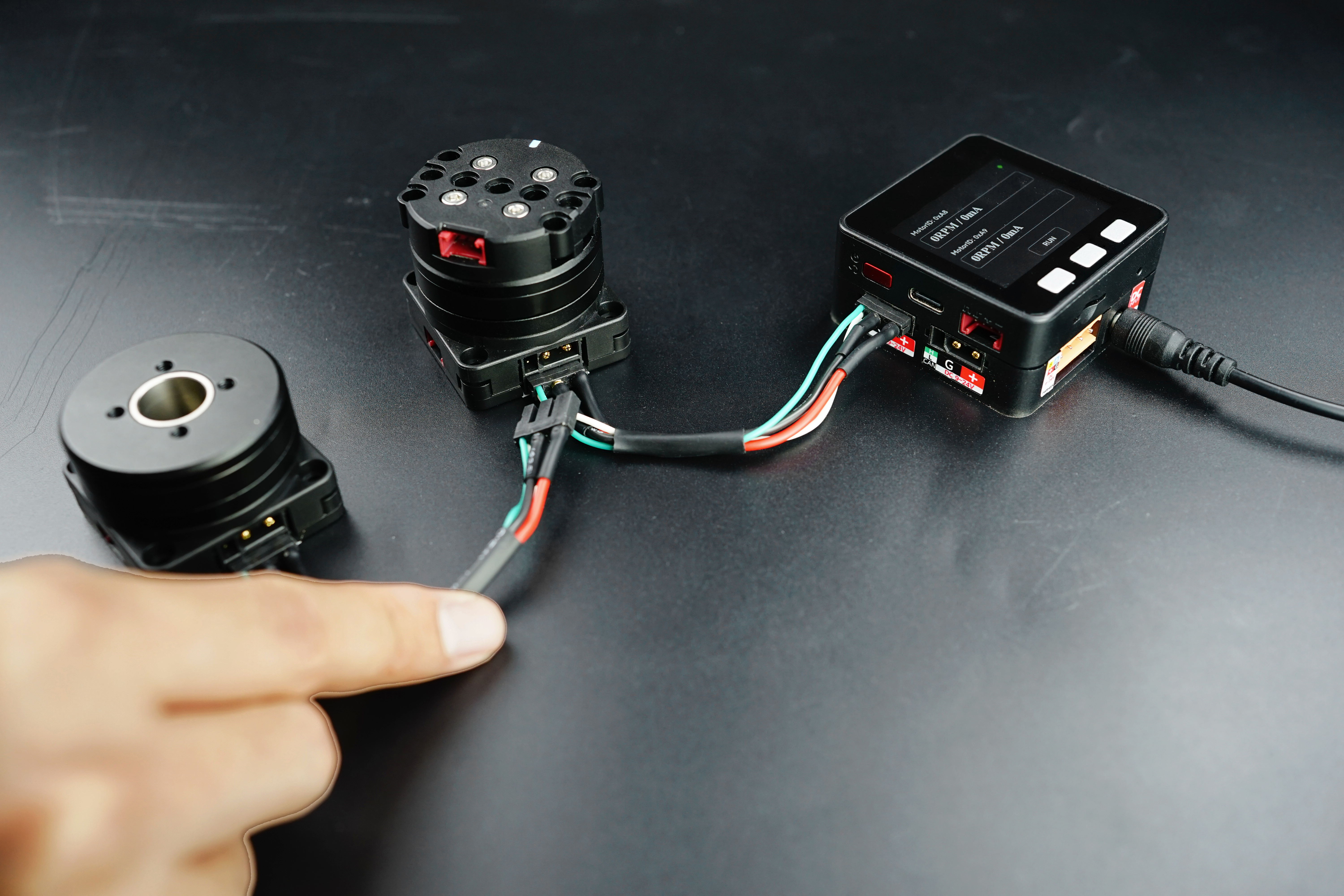
4. 设备接线
CAN 控制
多个电机通过 XT30 接口,用PwrCAN Cable连接实现多个连接组网,发送指令进行控制。使用前,需将设备配置成不同的 ID, 用于通信区分。
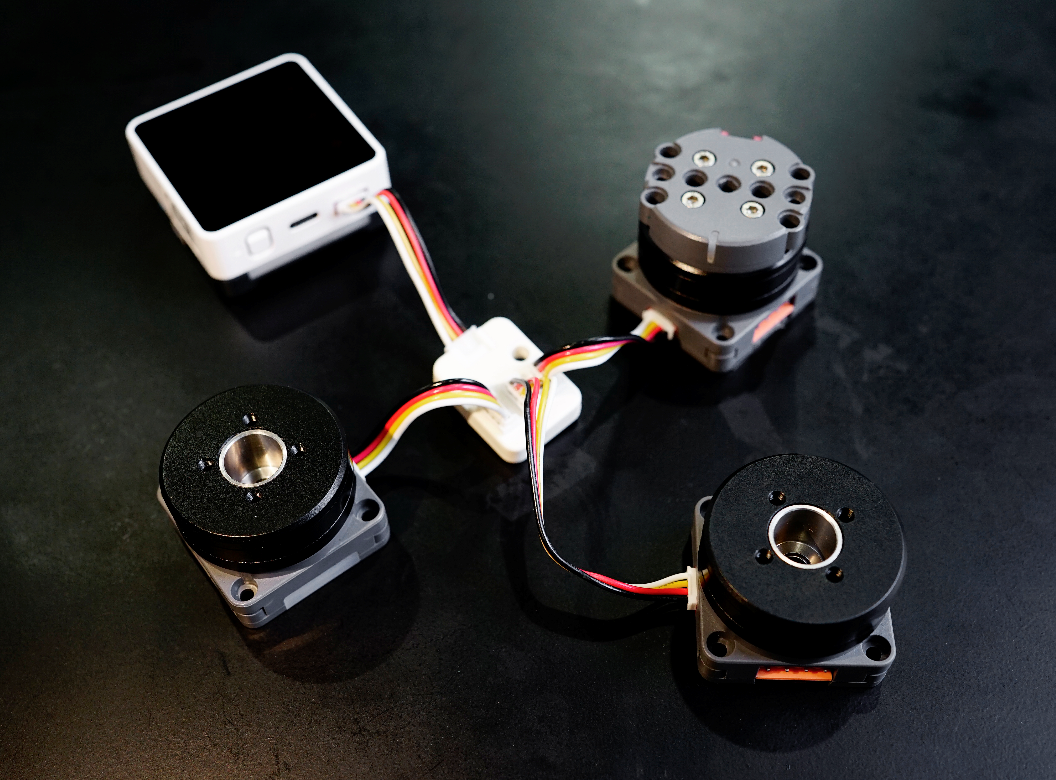
I2C 控制
多个电机通过 I2C 控制可通过Unit Hub连接器实现多个连接组网,访问从机寄存器进行控制。
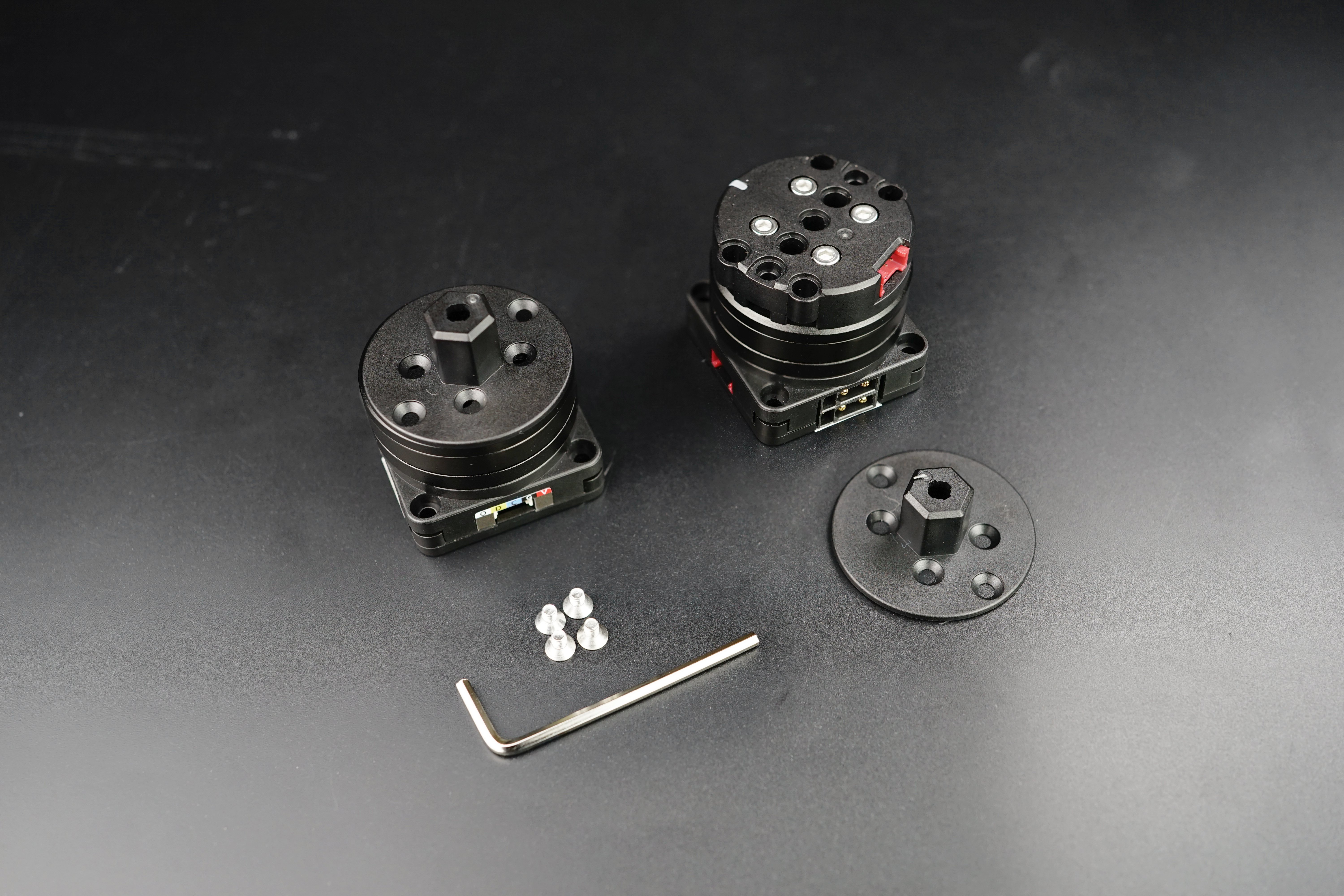
5. 结构件
Unit RollerCAN 套装标配了法兰盘和 LEGO 兼容支架结构件,方便用户构建自己的控制装置,可参考下图进行固定和安装。