

























Product Guide
Linux PC
Industrial Control
LLM
Real-Time AI Voice Assistant
Offline Voice Recognition
Zigbee
IoT Cloud
AWS IoT Core
Ethernet Camera
PoECAM
Wi-Fi Camera
Unit CamS3
AI Camera
Motor Control
Network
ファームウェアの初期化
ディップスイッチ使用ガイド
Module GPS v2.0
Module GNSS
Module ExtPort For Core2
Module LoRa868 V1.2
Unit RollerCAN ユーザーガイド
1. 電源
ユニット RollerCAN には、以下の 2 つの電源オプションがあります。
- CAN (XT30 (2+2) PW-M) インターフェース経由: DC 6-16V をサポートし、コントローラに電力を供給する DC-DC 降圧回路を内蔵。
- Grove インターフェース経由: DC 5V


2. デバイス構成
構成モード
ユニット RollerCAN には、ユーザー入力および操作のための OLED および物理ボタンが統合されています。 モーターを展開する前に、必要に応じていくつかの初期構成を行うことができます。 以下の手順を参照して、構成モードに入ります。
- ボトムボタン (ボタン A) を長押し
- デバイスをオンにする
- 設定モードに入る
- 設定メニューに入ったら、モーターを回転させてオプションを切り替え、ボタンを押して選択 / 戻る。

通信モード
ユニット RollerCAN では現在、以下の通信オプションが提供されています。 ユーザーは、導入シナリオに基づいて適切なインターフェースとプロトコルを選択できます。
- I2C モード: このモードでは、モーターは I2C 通信インターフェースを介して制御されます。
- CAN モード: このモードでは、モーターは CAN 通信インターフェースを介して制御されます。
- CAN->I2C モード: このモードでは、モーターは CAN 通信インターフェースを介して制御されますが、CAN->I2C 転送コマンドをサポートしており、ブリッジを介した I2C デバイスデータの読み取り / 書き込みが可能です。

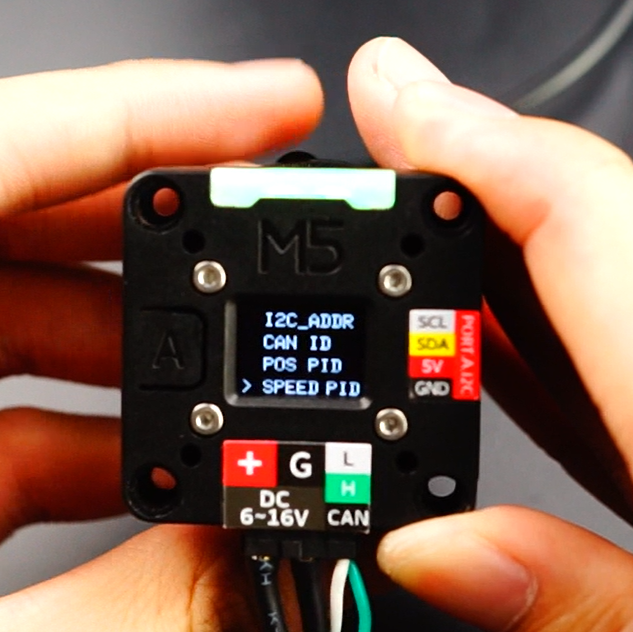
通信アドレス
- I2C ADDR: デバイスがスレーブとして I2C 通信モードにある場合、I2C アドレスを設定します。
- CAN ID: CAN モードでの通信に使用する ID を設定します。範囲は 0~255 で、デフォルト値は 168 (0xA8) です。

PID プリセット
速度制御モードと位置制御モードの PID を設定します。 さまざまなシナリオに合わせて最適化された以下のプリセットから選択できます。 ユーザーは、実際のニーズに合わせてパラメータを微調整することをお勧めします。
- デフォルトのユーザー設定
- 軽負荷に最適化された設定
- 中負荷に最適化された設定
- 重負荷に最適化された設定
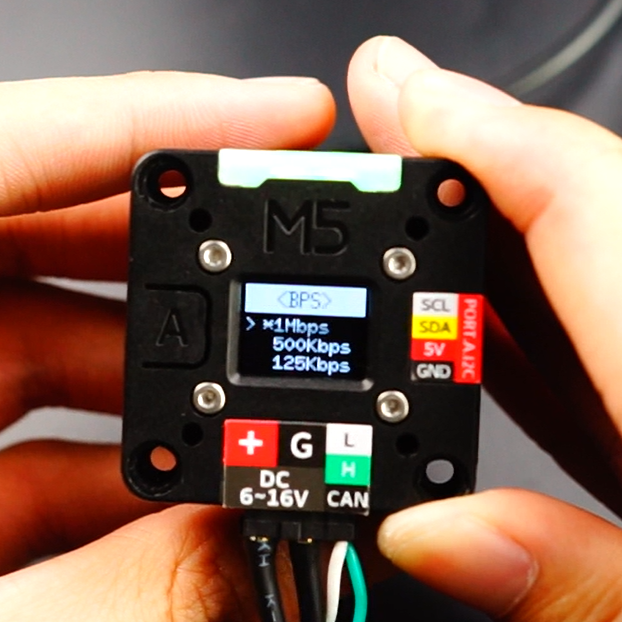
CAN ボーレートの設定
CAN 通信モードの場合、デバイスの通信速度 (bps) を設定できます。現在サポートされているオプションは、1M、500K、125K です。
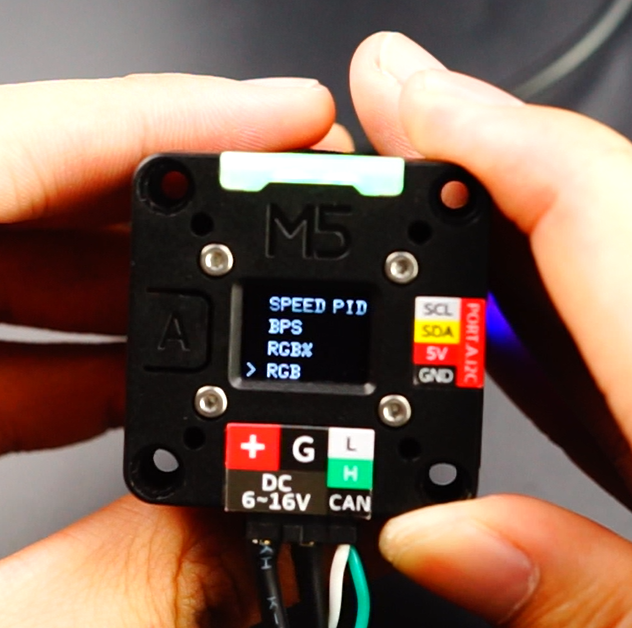
RGB 輝度
RGB LED の輝度を調整します。0~100% の範囲で設定できます。
RGB 動作モード
- システム自動モード: モーターの現在の動作モードに基づいて色を自動的に切り替えます。
- 緑 : 速度モード
- 青 : 位置モード
- 黄 : 電流モード
- 紫 : エンコーダモード
- 赤 : エラーアラーム
- ユーザーモード: ユーザーはインジケーターライトの色をカスタマイズできます。
JAM 保護
モーターのストール保護を設定します。 ストールが検出されると、モーターは自動的にロックされ、損傷が防止されます。
範囲保護
モーターの回転範囲保護を設定します。有効にすると、エンコーダ値が - 2,100,000,000 未満または 2,100,000,000 を超えた場合、モーターの回転が停止し、保護モードに入ります。
3. モーターの動作モード
Unit RollerCAN には 4 つの動作モードがあり、通信コマンドで設定できます (ページ下部のケースプログラムおよび通信プロトコルを参照)。
- 速度モード (緑): モーターを制御して、指定の目標速度 (RPM) で動作させます。

- 位置モード (青) | モーターを制御して、指定の位置 (エンコーダー値) まで回転させます。

- 電流モード (黄色) | モーターを制御して、指定の目標電流 (mA) で動作させます。

- エンコーダモード (紫) | モーターが入力装置として機能し、現在のエンコーダの回転値を収集します。

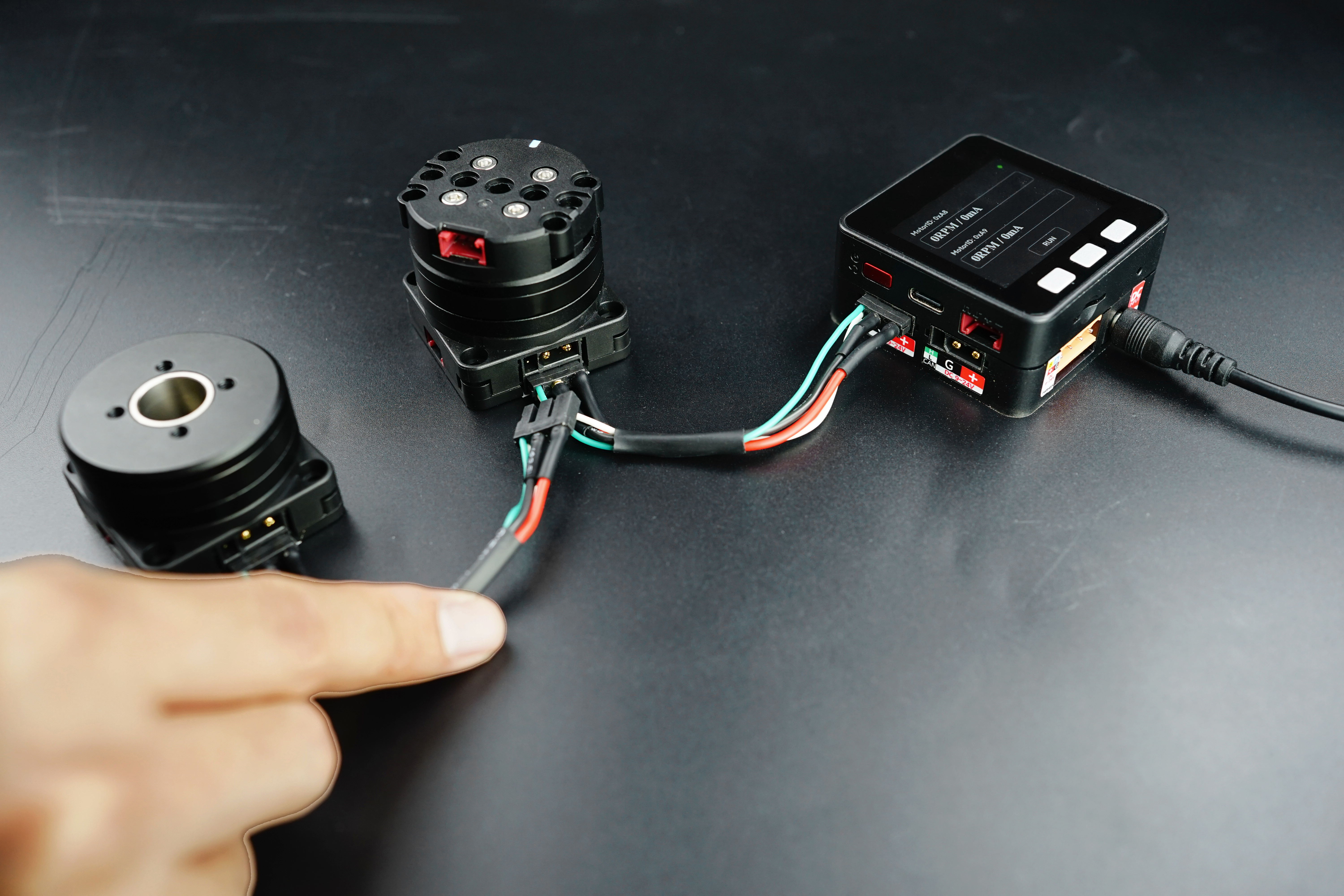
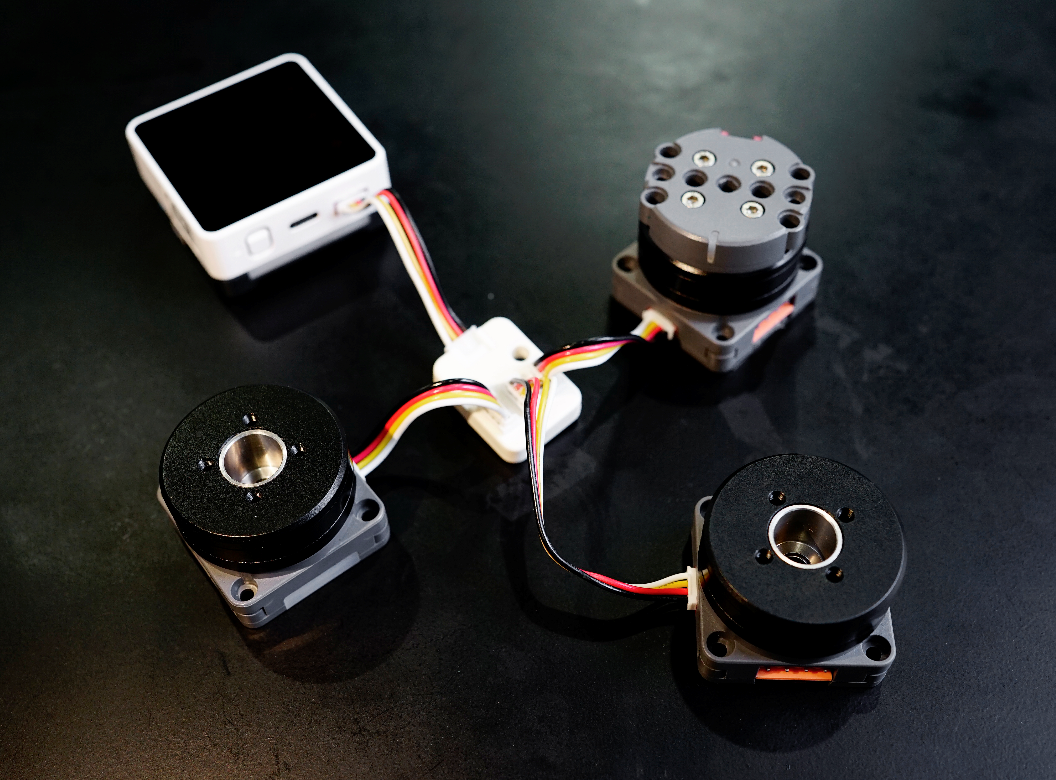
4. デバイスの配線
CAN 制御
PwrCAN ケーブルを使用して XT30 インターフェース経由でネットワークに複数のモーターを接続できます。 モーターを制御するためのコマンドが送信されます。 使用する前に、通信中に各デバイスを区別できるように、各デバイスに異なる ID を設定します。
I2C 制御
複数のモーターをUnit Hubで接続することで、I2C 経由で制御でき、制御用のスレーブレジスタにアクセスできるようになります。
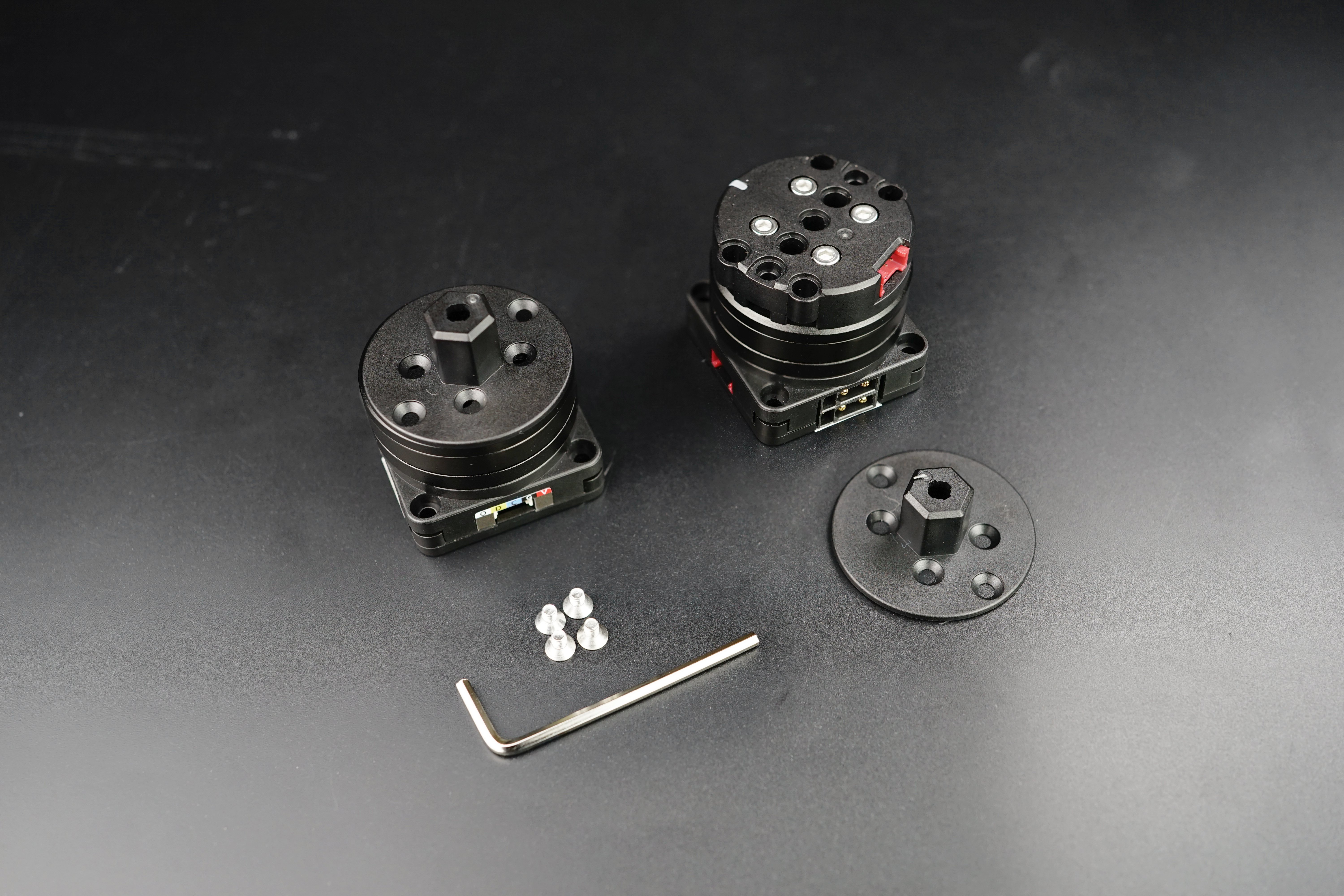
5. 構造部品
Unit RollerCAN セットには、ユーザーが独自の制御装置を構築する際に役立つ、フランジと LEGO 互換ブラケット部品が含まれています。 取り付けと設置については、以下の画像を参照してください。

6. 関連リソース
サンプルプログラム |
Communication Protocols: