StackFlow AI プラットフォーム
デバイスとクイックスタート
モデルの紹介
Qwen3
DeepSeek-R1
AI Pyramid Applications
アプリケーション
CVビジョンアプリケーション
VLMマルチモーダル
大規模言語モデル (LLM)
音声アシスタント
LLM630 Compute Kit - StackFlow API DepthAnything
この例では、PC 上でスクリプトを実行し、StackFlow API を通じて DepthAnything で変換された画像データを取得し、プレビューウィンドウでリアルタイムに表示する方法を紹介します。
1. 準備
- デバイスに電源を入れる前に、以下の図のように FPC ケーブルを使って CamModule SC850SL カメラを LLM630 Compute Kit に接続します。
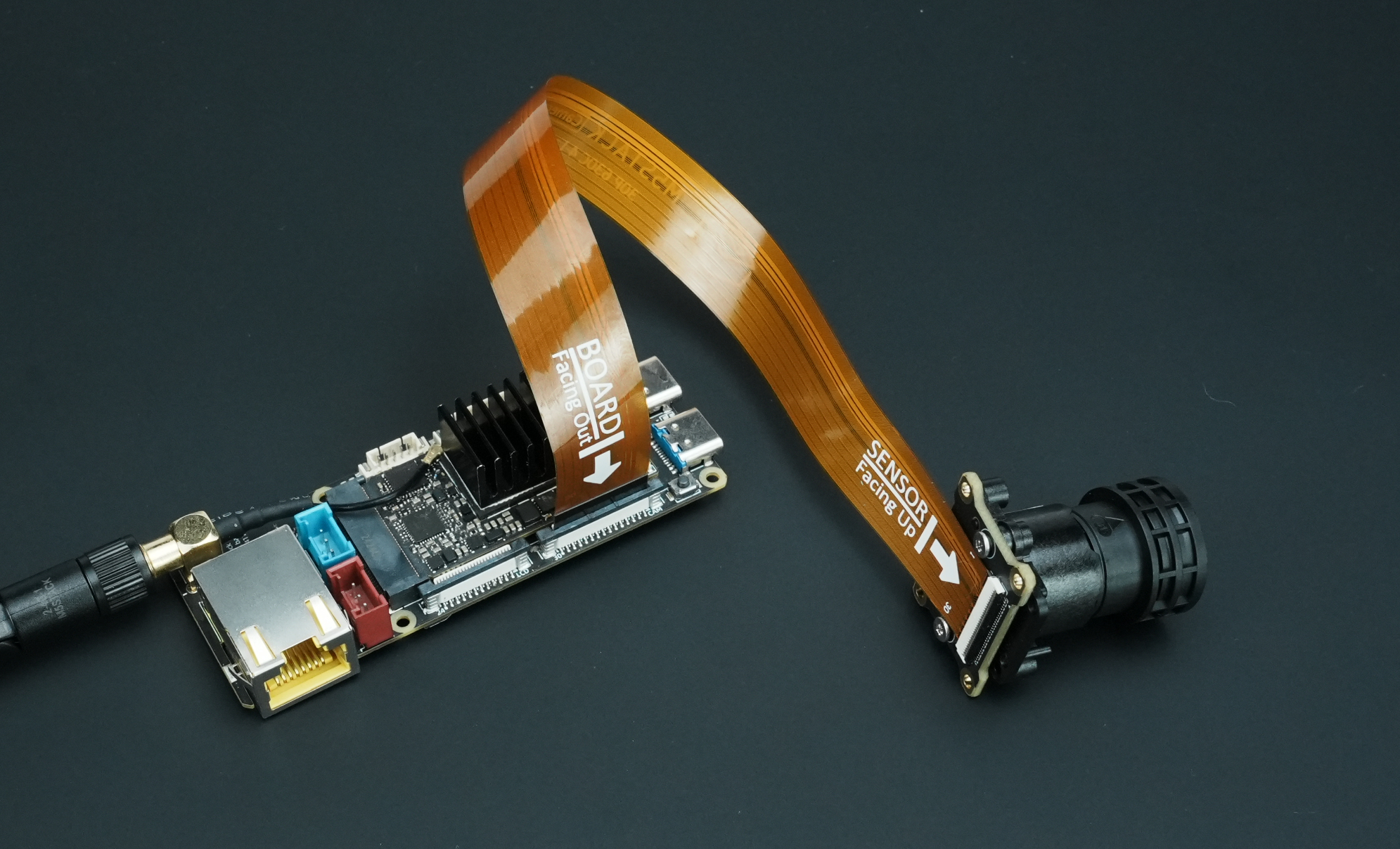
LLM630 Compute Kit UART / ADB / SSH 接続ガイドを参考にし、ネットワークやファイル転送の設定を行い、デバイスの IP アドレスを取得します。
LLM630 Compute Kit ソフトウェアアップデートガイドを参照して、以下のパッケージをインストールしてください。
apt install llm-camera llm-depth-anything # SoftWare Packageapt install llm-model-depth-anything-npu1-ax630c # Model Package2. クライアントプログラム
テスト用クライアントスクリプトをダウンロードし、PC と LLM630 Compute Kit が同じネットワーク内にあることを確認します。PC 上で以下のように pip を使用して opencv-python をインストールしてください。
pip install opencv-pythonpip install opencv-python -i https://mirrors.aliyun.com/pypi/simple # For Chinese users以下のスクリプトをコピーして保存し、実際のデバイス IP を指定して実行します:
python llm-depth-anything.py --host 192.168.20.24import argparse
import base64
import cv2
import json
import numpy as np
import select
import socket
import sys
import time
import threading
import tornado.ioloop
import tornado.web
latest_frame = [None]
class MJPEGHandler(tornado.web.RequestHandler):
def get(self):
self.set_header('Content-type', 'multipart/x-mixed-replace; boundary=frame')
while True:
if latest_frame[0] is not None:
ret, jpeg = cv2.imencode('.jpg', latest_frame[0])
if ret:
self.write(b'--frame\r\n')
self.write(b'Content-Type: image/jpeg\r\n\r\n')
self.write(jpeg.tobytes())
self.write(b'\r\n')
self.flush()
tornado.ioloop.IOLoop.current().add_callback(lambda: None) # yield to event loop
def start_webstream():
app = tornado.web.Application([
(r"/video_feed", MJPEGHandler),
])
app.listen(5000)
print("Tornado webstream started at http://localhost:5000/video_feed")
tornado.ioloop.IOLoop.current().start()
def create_tcp_connection(host, port):
sock = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
sock.connect((host, port))
return sock
def send_json(sock, data):
json_data = json.dumps(data, ensure_ascii=False) + '\n'
sock.sendall(json_data.encode('utf-8'))
recv_buffer = ""
def receive_response(sock):
global recv_buffer
while '\n' not in recv_buffer:
part = sock.recv(4096).decode('utf-8')
if not part:
break
recv_buffer += part
if '\n' in recv_buffer:
line, recv_buffer = recv_buffer.split('\n', 1)
return line.strip()
else:
line, recv_buffer = recv_buffer, ""
return line.strip()
def close_connection(sock):
if sock:
sock.close()
def create_init_data(response_format, device, enoutput, frame_height, frame_width, enable_webstream, rtsp):
return {
"request_id": "camera_001",
"work_id": "camera",
"action": "setup",
"object": "camera.setup",
"data": {
"response_format": "image.yuvraw.base64" if response_format =="yuv" else "image.jpeg.base64",
"input": device,
"enoutput": enoutput,
"frame_width": frame_width,
"frame_height": frame_height,
"enable_webstream": enable_webstream,
"rtsp": "rtsp.1280x720.h265" if rtsp == "h265" else "rtsp.1280x720.h264",
}
}
def parse_setup_response(response_data):
error = response_data.get('error')
if error and error.get('code') != 0:
print(f"Error Code: {error['code']}, Message: {error['message']}")
return None
return response_data.get('work_id')
def reset(sock):
sent_request_id = 'reset_000'
reset_data = {
"request_id": sent_request_id,
"work_id": "sys",
"action": "reset"
}
ping_data = {
"request_id": "ping_000",
"work_id": "sys",
"action": "ping"
}
send_json(sock, reset_data)
while True:
try:
send_json(sock, ping_data)
time.sleep(1)
except (BrokenPipeError, ConnectionResetError, OSError) as e:
return # Sock disconnection indicates reset is complete
def setup(sock, init_data):
sent_request_id = init_data['request_id']
send_json(sock, init_data)
while True:
response = receive_response(sock)
response_data = json.loads(response)
if response_data.get('request_id') == sent_request_id:
return parse_setup_response(response_data)
def exit_session(sock, deinit_data):
send_json(sock, deinit_data)
print("Exit")
def parse_inference_response(response_data):
error = response_data.get('error')
if error and error.get('code') != 0:
print(f"Error Code: {error['code']}, Message: {error['message']}")
return None
return {
"work_id": response_data.get("work_id"),
"object": response_data.get("object"),
"data": response_data.get("data")
}
def main(args):
sock = create_tcp_connection(args.host, args.port)
frame_height, frame_width = args.imgsz
try:
print("Reset...")
reset(sock)
close_connection(sock)
sock = create_tcp_connection(args.host, args.port)
print("Setup Camera...")
init_data = create_init_data(
response_format = args.format,
enoutput=args.enoutput,
device=args.device,
frame_height=frame_height,
frame_width=frame_width,
enable_webstream=args.webstream,
rtsp=args.rtsp
)
camera_work_id = setup(sock, init_data)
if camera_work_id is not None:
print(f"Camera setup with work_id: {camera_work_id}")
else:
print("Camera setup failed.")
return
print("Setup Depth Anything...")
depth_anything_init_data = {
"request_id": "depth_anything_001",
"work_id": "depth_anything",
"action": "setup",
"object": "depth_anything.setup",
"data": {
"model": args.model,
"response_format": "image.jpeg.base64",
"input": camera_work_id,
"enoutput": True,
}
}
depth_anything_work_id = setup(sock, depth_anything_init_data)
if depth_anything_work_id is not None:
print(f"Depth Anything setup with work_id: {depth_anything_work_id}")
else:
print("Depth Anything setup failed.")
return
print("Press 'q' to exit")
depth_anything_bgr_frame = None
webstream_thread = None
if args.webstream:
webstream_thread = threading.Thread(target=start_webstream, daemon=True)
webstream_thread.start()
while True:
response = receive_response(sock)
if not response:
continue
response_data = json.loads(response)
Rawdata = parse_inference_response(response_data)
if Rawdata is None:
break
work_id = Rawdata.get("work_id")
object = Rawdata.get("object")
data = Rawdata.get("data")
if work_id == depth_anything_work_id and object == "image.jpeg.base64":
decoded = base64.b64decode(data)
jpg_array = np.frombuffer(decoded, dtype=np.uint8)
depth_anything_bgr_frame = cv2.imdecode(jpg_array, cv2.IMREAD_COLOR)
if depth_anything_bgr_frame is not None:
if args.webstream:
latest_frame[0] = depth_anything_bgr_frame.copy()
if args.host not in ["localhost", "127.0.0.1"]:
cv2.imshow("Depth Anything", depth_anything_bgr_frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cv2.destroyAllWindows()
exit_session(sock, {
"request_id": "depth_anything_exit",
"work_id": depth_anything_work_id,
"action": "exit"
})
exit_session(sock, {
"request_id": "camera_exit",
"work_id": camera_work_id,
"action": "exit"
})
time.sleep(3) # Allow time for the exit command to be processed
finally:
close_connection(sock)
if __name__ == "__main__":
parser = argparse.ArgumentParser(description="TCP Client to send JSON data.")
parser.add_argument("--host", type=str, default="localhost", help="Server hostname (default: localhost)")
parser.add_argument("--port", type=int, default=10001, help="Server port (default: 10001)")
parser.add_argument("--device", type=str, default="axera_single_sc850sl", help="Camera name, i.e. axera_single_sc850sl or /dev/video0")
parser.add_argument("--enoutput", type=bool, default=False, help="Whether to output image data")
parser.add_argument("--format", "--output-format", type=str, default="jpeg", help="Output image data format, i.e. jpeg or yuv")
parser.add_argument("--imgsz", "--img", "--img-size", nargs="+", type=int, default=[256, 384], help="image (h, w)")
parser.add_argument("--webstream", action="store_true", help="Enable webstream")
parser.add_argument("--rtsp", default="h264", help="rtsp output, i.e. h264 or h265")
parser.add_argument("--model", type=str, default="depth-anything-npu1-ax630c", help="Model name")
args = parser.parse_args()
main(args)パラメータ説明
host:LLM630 Compute Kit の IP アドレス
port:TCP ポート(デフォルト:10001)
device:カメラ名(MIPI CSI の場合
'axera_single_sc850sl'、USB カメラは'/dev/video0'など)enoutput:画像データを出力するか(デフォルト:無効)
format:出力画像のフォーマット(デフォルト:
yuv、jpegも選択可能)imgsz:画像サイズ(デフォルト:320×320)
webstream:Web ストリームを有効にするか(デフォルト:無効)
- 有効時、
http://IP:8989/でカメラ映像、http://IP:5000/video_feedで深度画像を表示可能
- 有効時、
rtsp:RTSP 映像のエンコード方式(デフォルトは
h264、h265も選択可能)model:使用する DepthAnything モデル名(デフォルト:
depth-anything-npu1-ax630c)
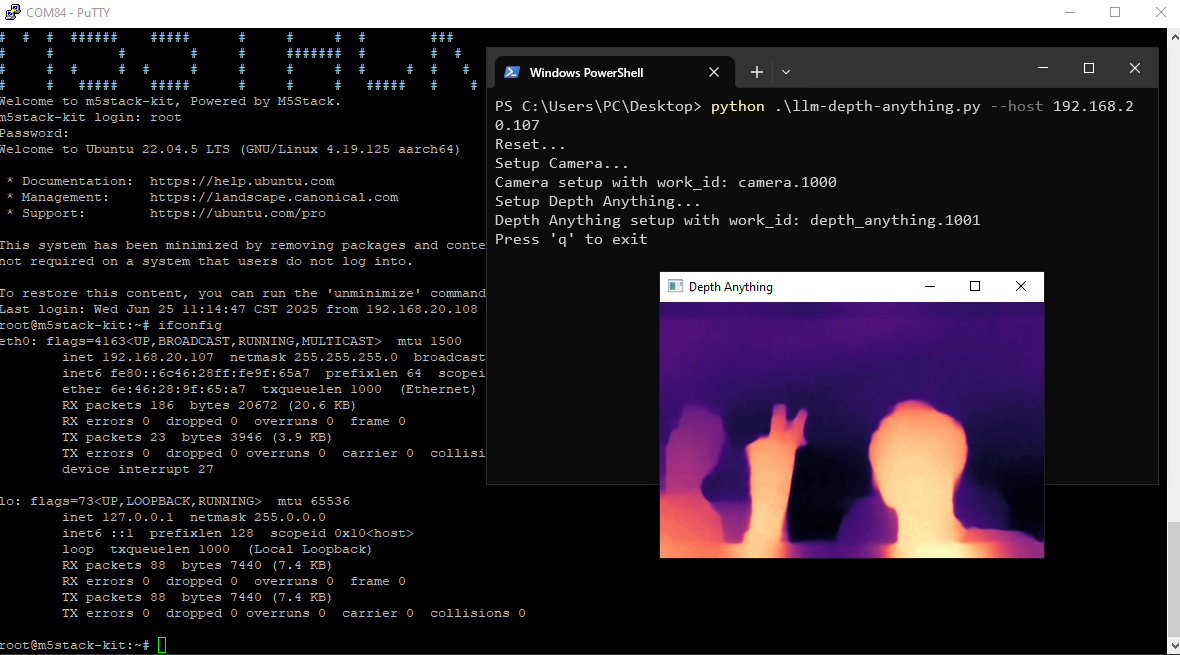
3. インタラクション開始
以下のように、PC 画面にカメラ映像と深度検出結果が表示されます。キーボードの “q” キーを押すと終了します。