

StackFlow AI Platform
设备开发 & 快速上手
模型介绍
Qwen3
DeepSeek-R1
AI Pyramid 应用案例
Module LLM 应用案例
CV 视觉应用
VLM 多模态
LLM 大语言模型
语音助手
AI Pyramid - Frigate NVR
Frigate 是一个开源的网络视频录制系统(NVR),采用实时 AI 物体检测技术构建。所有视频处理均在您自己的硬件上本地执行,摄像头视频流永远不会离开您的网络,确保了数据隐私和安全性。
1. 获取资源文件
选择以下任一方式获取 Frigate 部署资源:
方式一:手动下载
访问 Frigate 资源仓库 进行下载,随后上传到 AI Pyramid 设备。
方式二:命令行克隆
依赖检查
若系统未安装 git lfs,请参考 git lfs 安装指南 进行安装。
git clone -b v0.17-ax650 https://huggingface.co/AXERA-TECH/frigate-resource1.1 资源文件说明
克隆完成后,目录结构如下:
root@m5stack-AI-Pyramid:~/rsp/frigate-resource# ls -lh
total 4.2G
-rw-rw-r-- 1 axera axera 736 Jan 28 14:27 docker-compose.yml
-rw-rw-r-- 1 axera axera 4.2G Jan 28 14:33 frigate-ax650-990aee8.tar
-rw-rw-r-- 1 axera axera 3.6K Jan 28 14:27 README.md2. 部署 Docker 镜像
步骤 1:导入镜像
docker load -i frigate-resource/frigate-ax650-990aee8.tar注意
镜像文件可能随版本更新而变化,请根据实际目录中的文件名进行导入。
步骤 2:准备工作目录
mkdir -p ~/frigate-runtime/{config,storage}
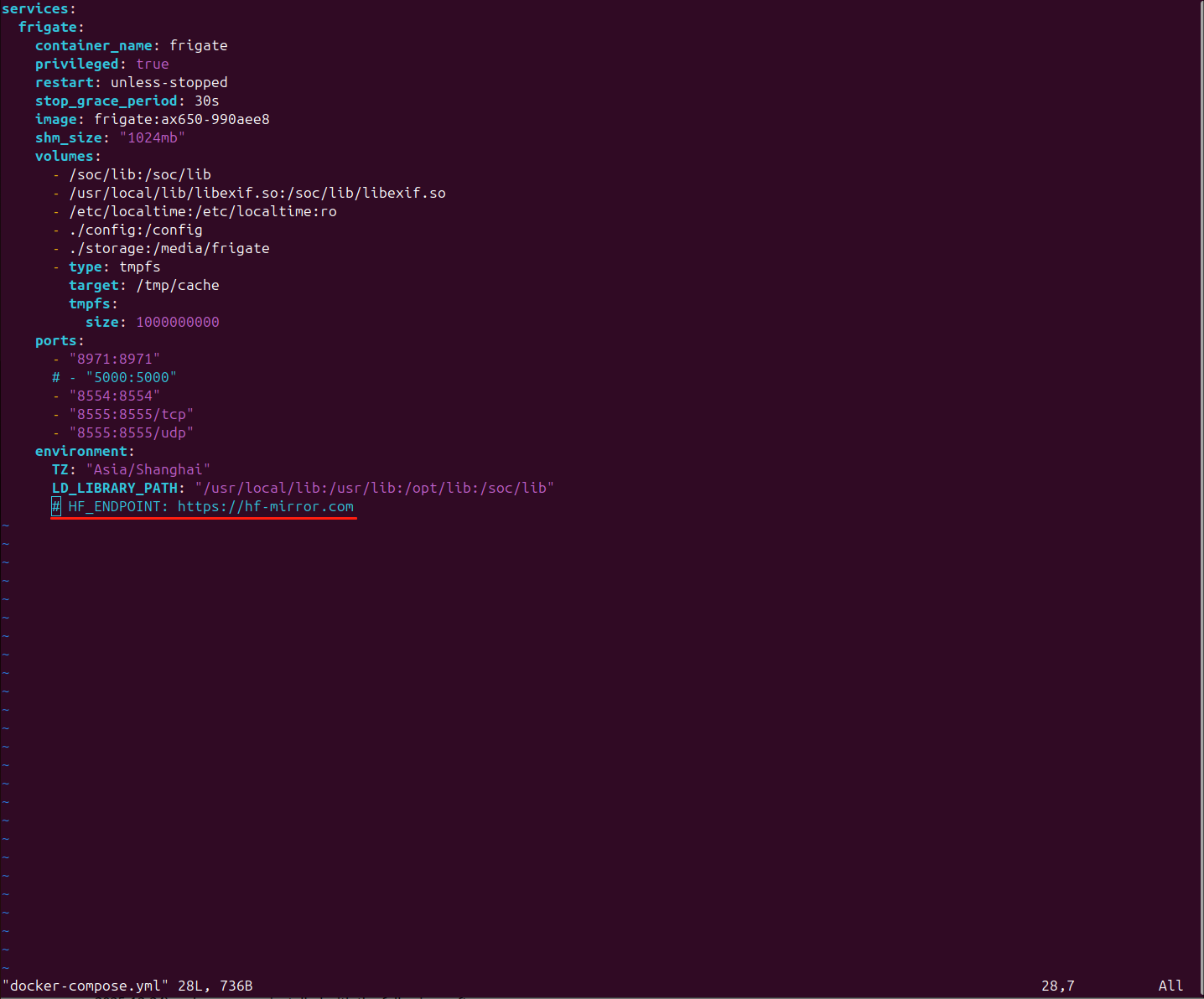
cp frigate-resource/docker-compose.yml ~/frigate-runtime/中国大陆用户
需要在 docker-compose.yml 中取消注释 HuggingFace 环境变量设置,以便正常自动下载模型文件。
步骤 3:启动容器
内存配置
对于 4GB 内存版本的 AI Pyramid,启动前请参考 增加虚拟内存教程 以确保程序能够正常运行。
cd ~/frigate-runtime/
docker compose up -d步骤 4:获取初始登录凭证
启动完成后,查看日志以获取自动生成的初始用户名和密码:
docker logs frigate示例输出:
root@m5stack-AI-Pyramid:~/frigate-runtime# docker logs frigate
2026-01-28 14:55:53.546981309 [2026-01-28 14:55:53] frigate.app INFO : ********************************************************
2026-01-28 14:55:53.548374976 [2026-01-28 14:55:53] frigate.app INFO : ********************************************************
2026-01-28 14:55:53.549670976 [2026-01-28 14:55:53] frigate.app INFO : *** Auth is enabled, but no users exist. ***
2026-01-28 14:55:53.550969226 [2026-01-28 14:55:53] frigate.app INFO : *** Created a default user: ***
2026-01-28 14:55:53.574785726 [2026-01-28 14:55:53] frigate.app INFO : *** User: admin ***
2026-01-28 14:55:53.664755976 [2026-01-28 14:55:53] frigate.app INFO : *** Password: 3a846bd9fd871ace399e32d7126ad5eb ***
2026-01-28 14:55:53.734733393 [2026-01-28 14:55:53] frigate.app INFO : ********************************************************
2026-01-28 14:55:53.814732809 [2026-01-28 14:55:53] frigate.app INFO : ********************************************************
2026-01-28 14:55:53.904771809 [2026-01-28 14:55:53] frigate.app INFO : Starting FastAPI app3. 初始化配置
3.1 访问 Web 管理界面
使用浏览器访问 Frigate 管理界面:
https://server_ip:8971首次访问
请使用上一步获取的
admin 用户名和随机生成的密码进行登录。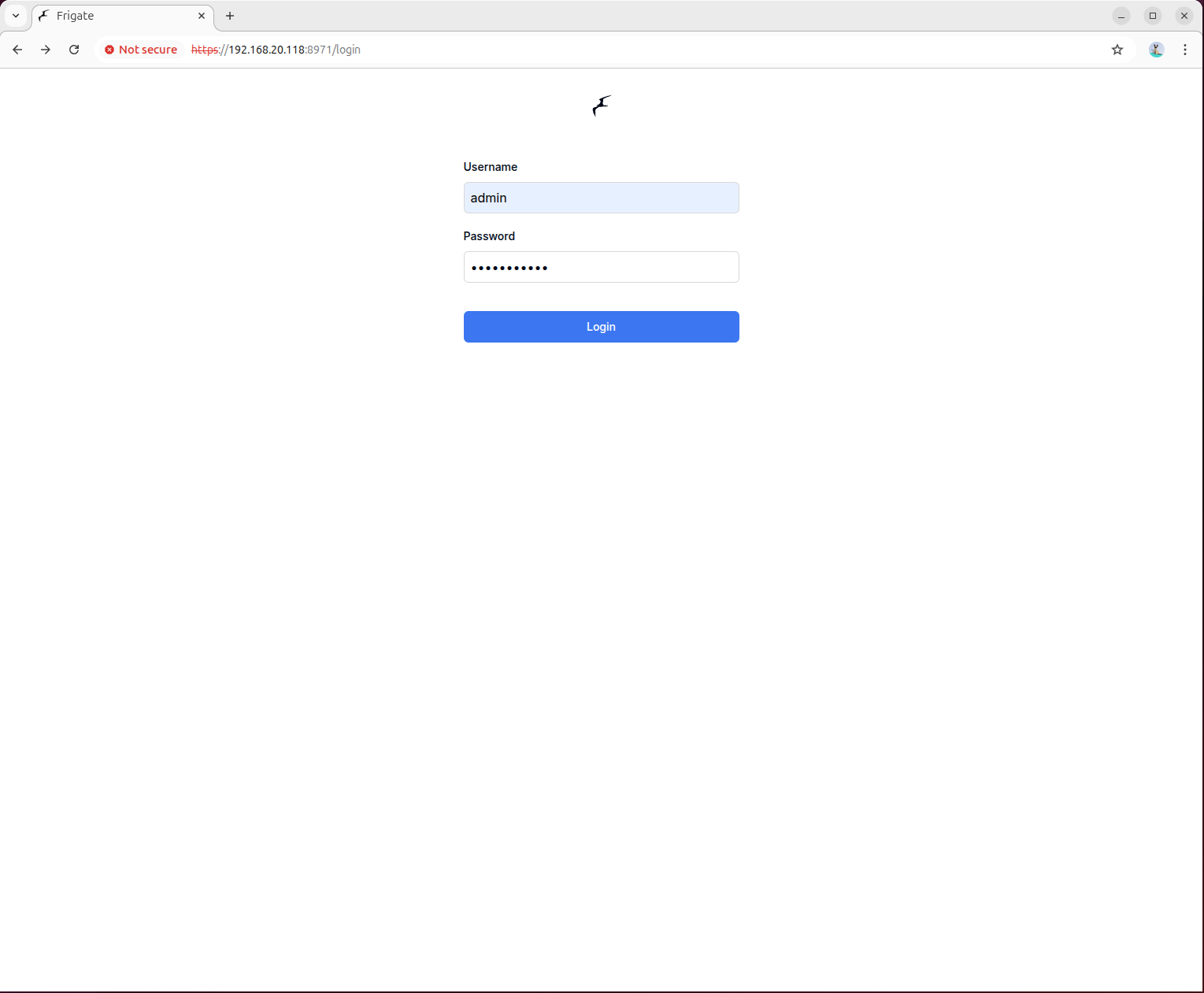
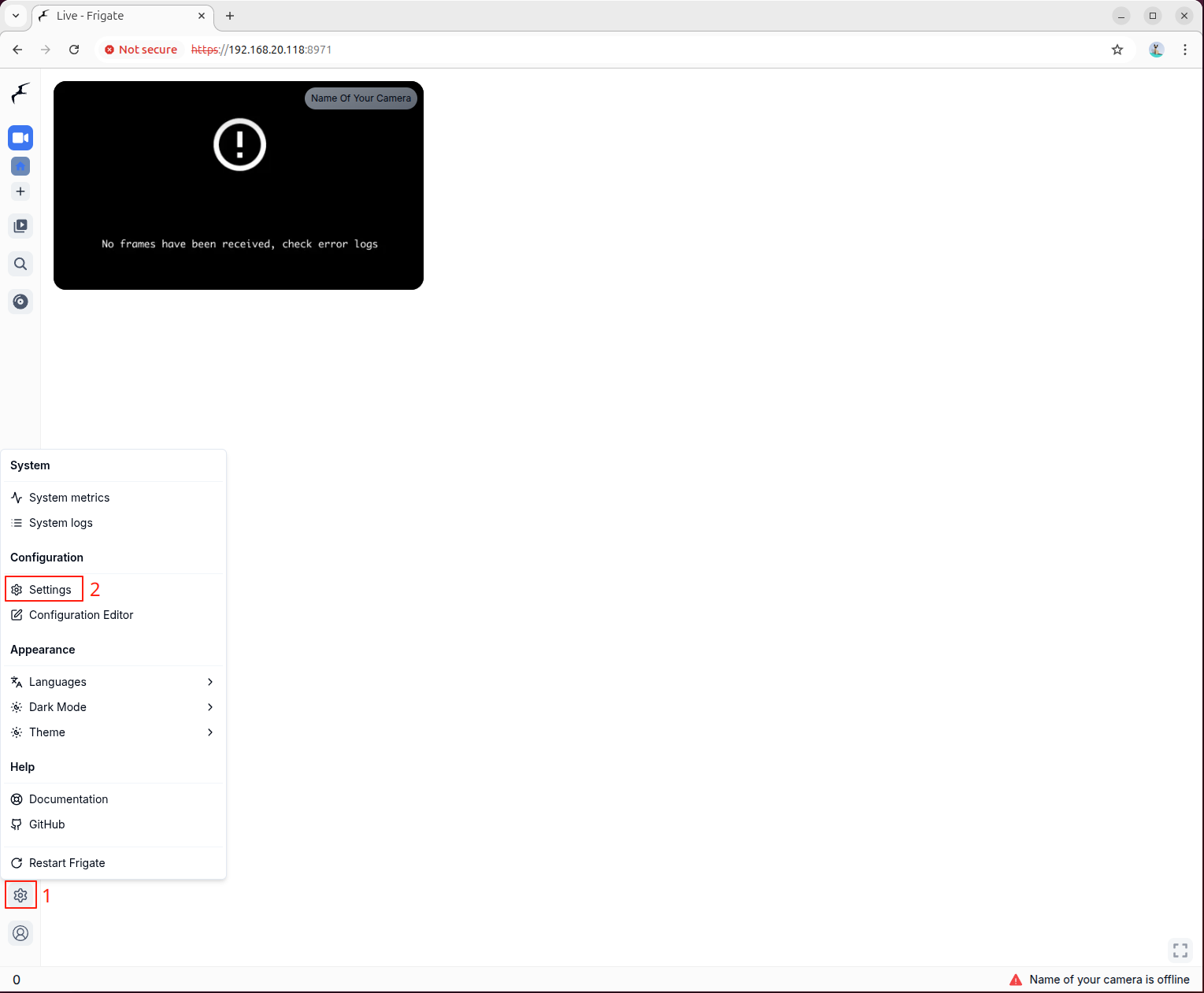
3.2 配置摄像头参数
点击界面左侧的"设置",进入配置界面,编辑配置文件。修改 go2rtc 部分,将其替换为您自己的 IP 摄像头地址,填入以下配置示例并保存:
配置示例
mqtt:
enabled: false
go2rtc:
streams:
# Main stream
road1:
- rtsp://192.168.20.57:8554/road1.264
# Sub stream
road1_sub:
- rtsp://192.168.20.57:8554/road1_sub.264
cameras:
road1:
enabled: true
ffmpeg:
inputs:
# Path of the recording stream, using the main stream configured in go2rtc
# During debugging, a local media file can be used here
- path: rtsp://127.0.0.1:8554/road1
roles:
- record
# Path of the detection stream, using the sub stream configured in go2rtc
# During debugging, a local media file can be used here
- path: rtsp://127.0.0.1:8554/road1_sub
roles:
- detect
# preset-axera-h264 is used to decode H.264 streams
# preset-axera-h265 is used to decode H.265 streams
# These two decoder presets are preferred
hwaccel_args: preset-axera-h264
# If the resolution of the detection sub stream is lower than the detection resolution,
# you can reduce the detection resolution to match the stream
# or use preset-axera-h264-compat / preset-axera-h265-compat as decoder presets
record:
enabled: true
# Enable detection
# If detection width and height are not set, the native resolution of the detection stream is used
detect:
enabled: true
width: 576
height: 320
fps: 5
# Configure the detection engine to use axengine
detectors:
axengine:
type: axengine
# Configure the object detection model for axengine
model:
path: frigate-yolov9-tiny
model_type: yolo-generic
width: 320
height: 320
input_pixel_format: bgr
labelmap_path: /labelmap/coco-80.txt
# Object types to track
objects:
track:
- person
- car
- bicycle
- motorcycle
# Semantic search configuration
# When used for the first time, the model needs to be downloaded online, please be patient
semantic_search:
enabled: true
model: ax_jinav2
model_size: large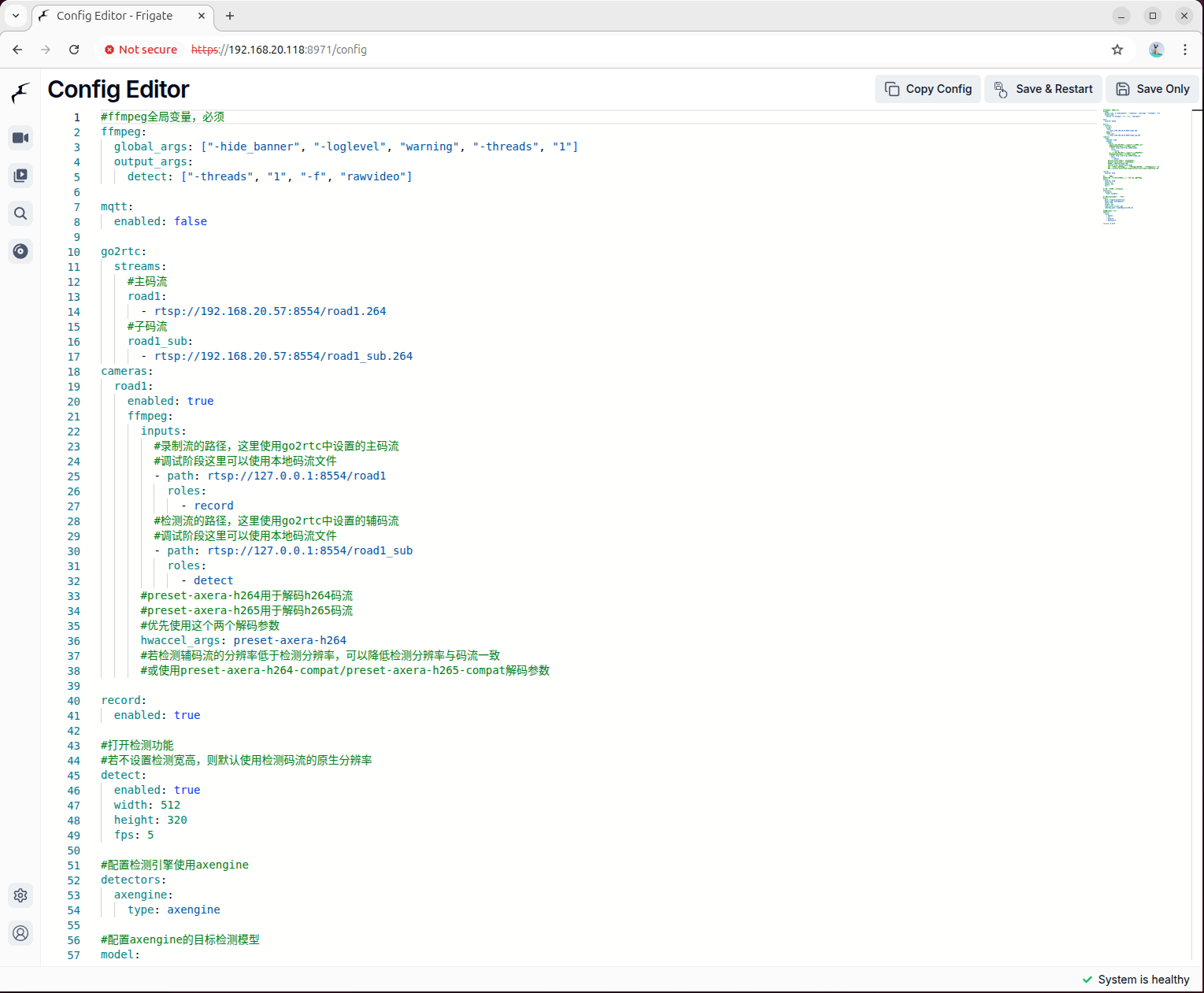
3.3 重启服务并验证
保存配置后,重启 Frigate 容器以应用新的配置:
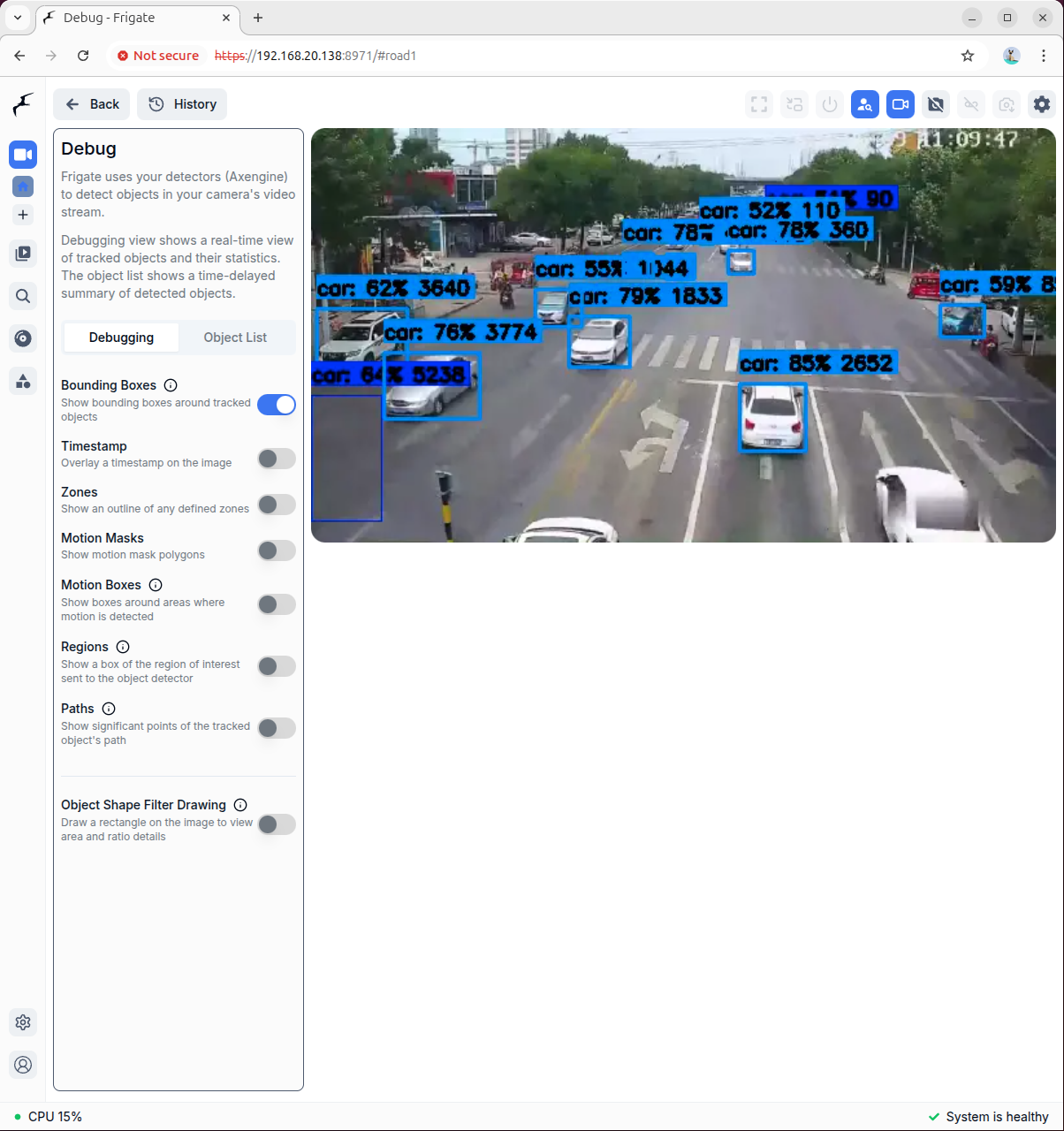
docker restart frigate进入调试预览界面,在视频流上右键菜单选择进入调试预览模式:
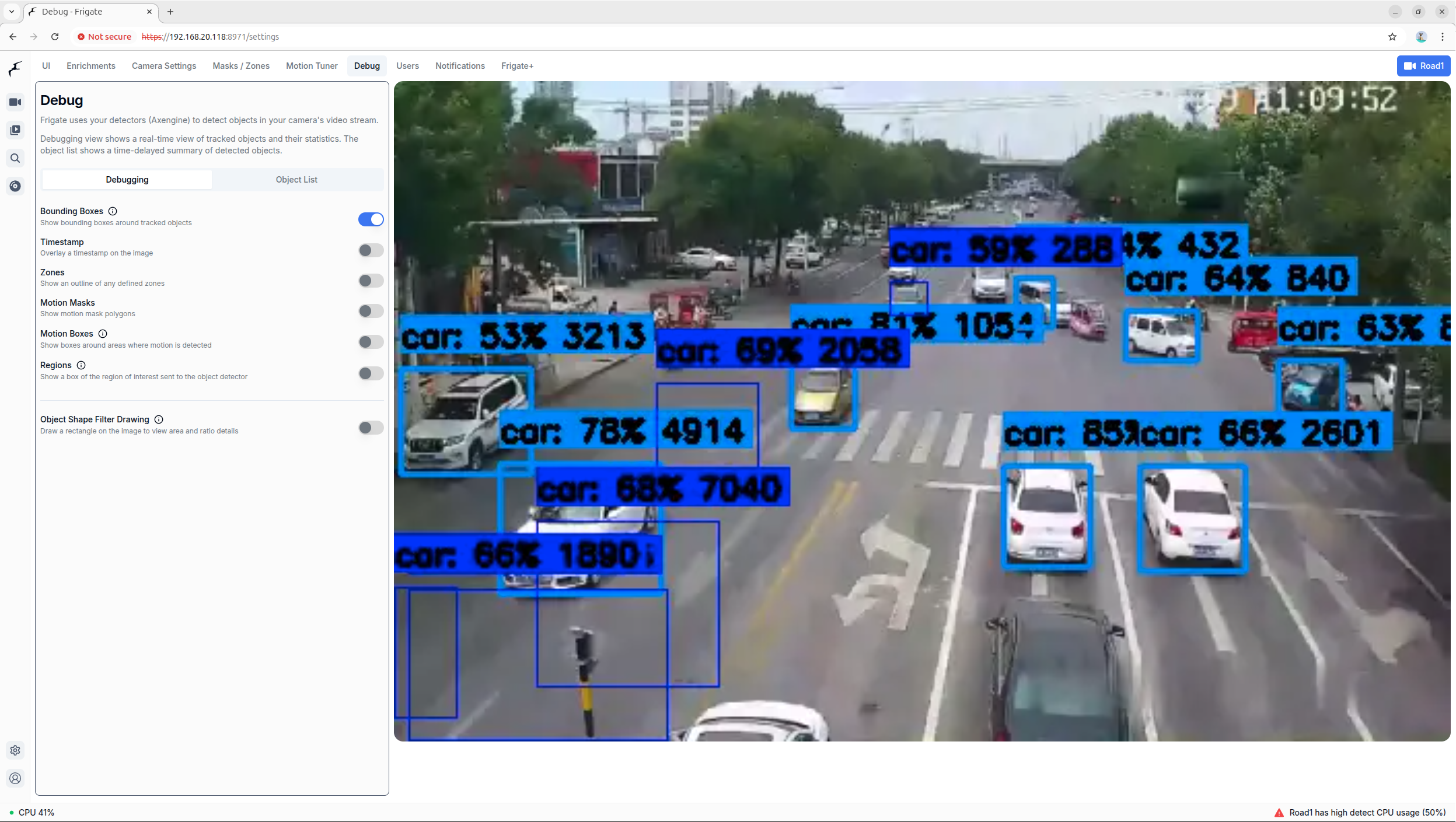
您可以在设置界面中预览检测框和其他信息:
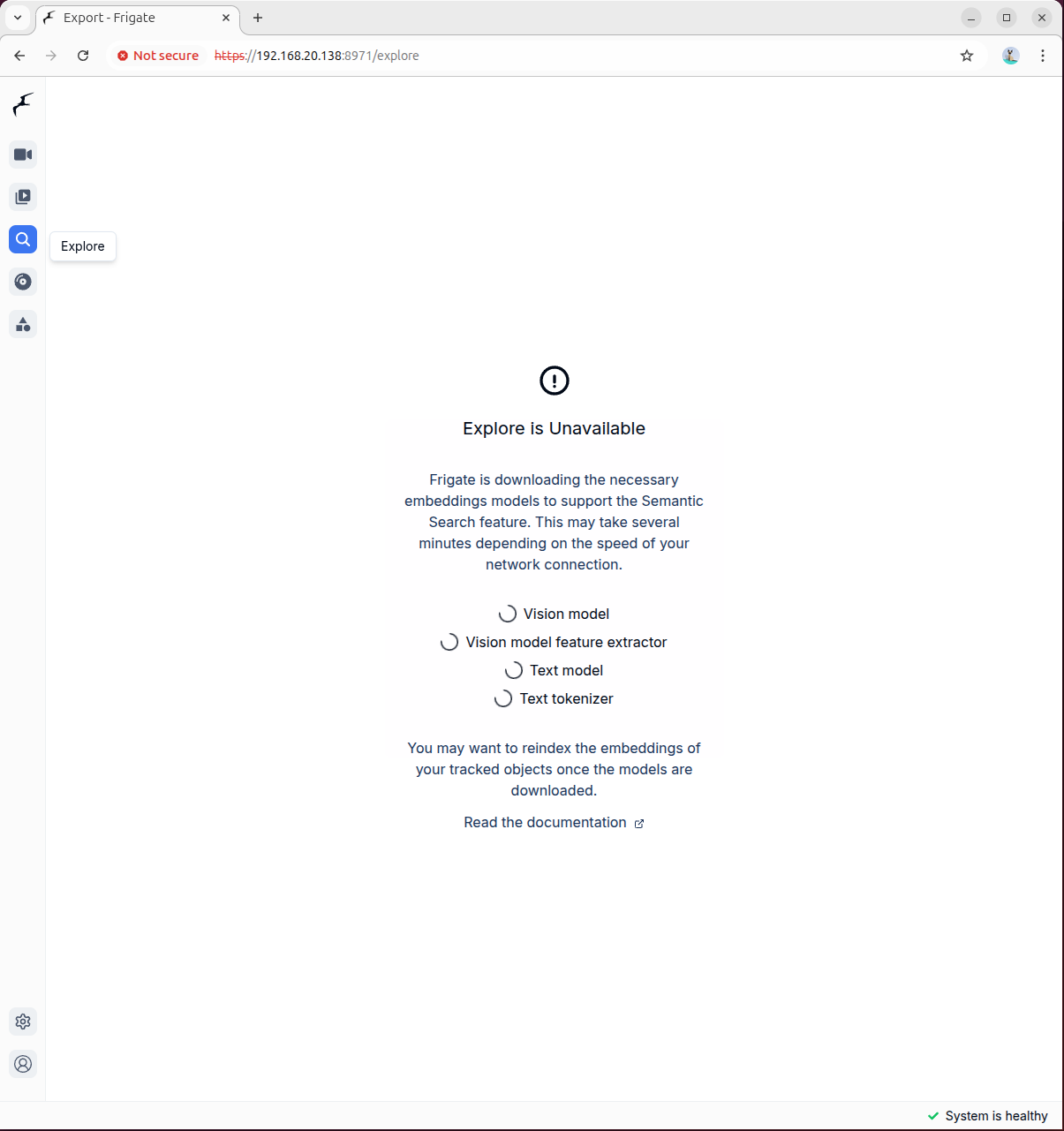
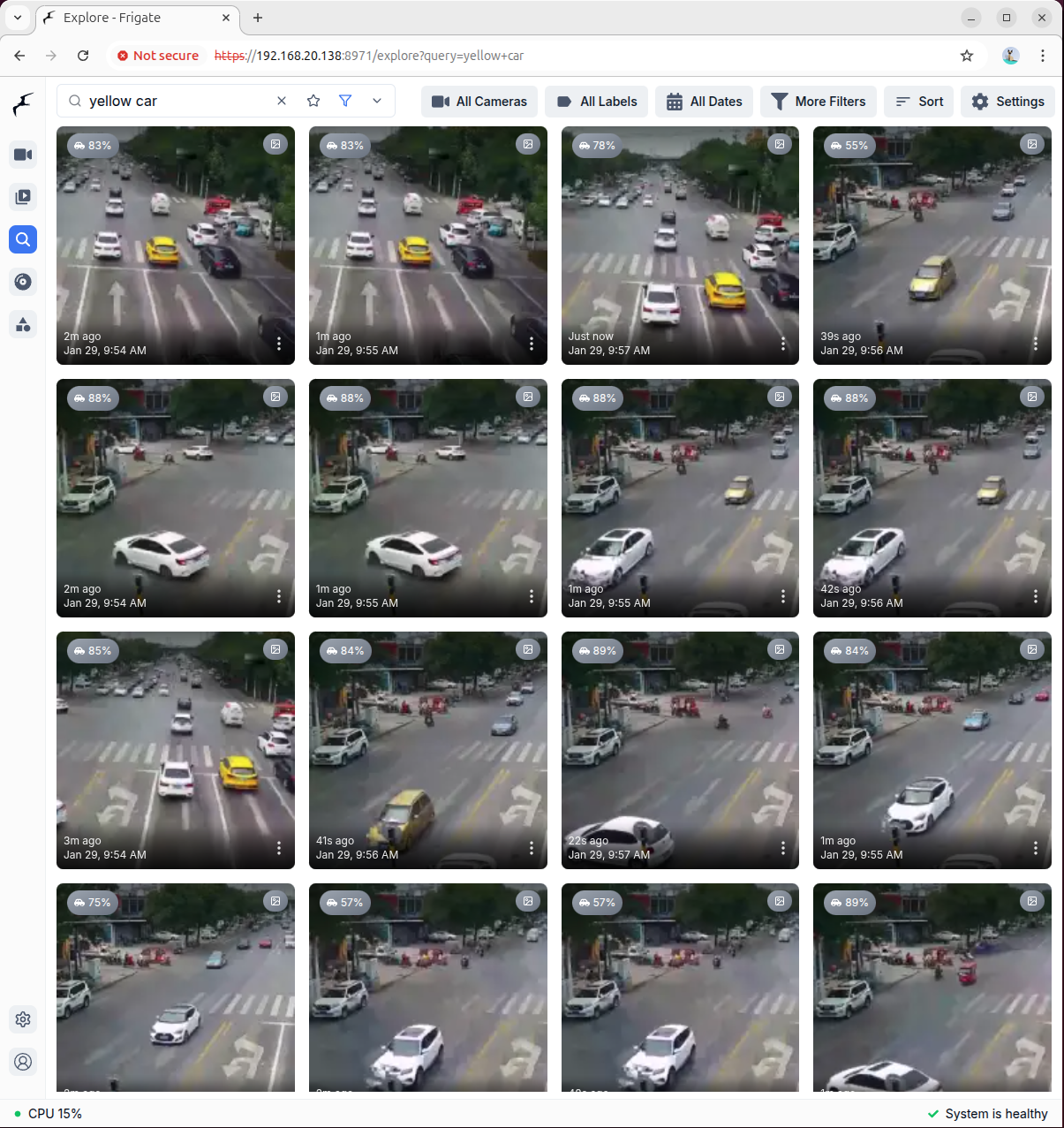
4. 语义搜索和浏览
点击"浏览"按钮进入媒体浏览界面。首次进入时需要下载语义搜索模型,模型文件较大,请耐心等待:
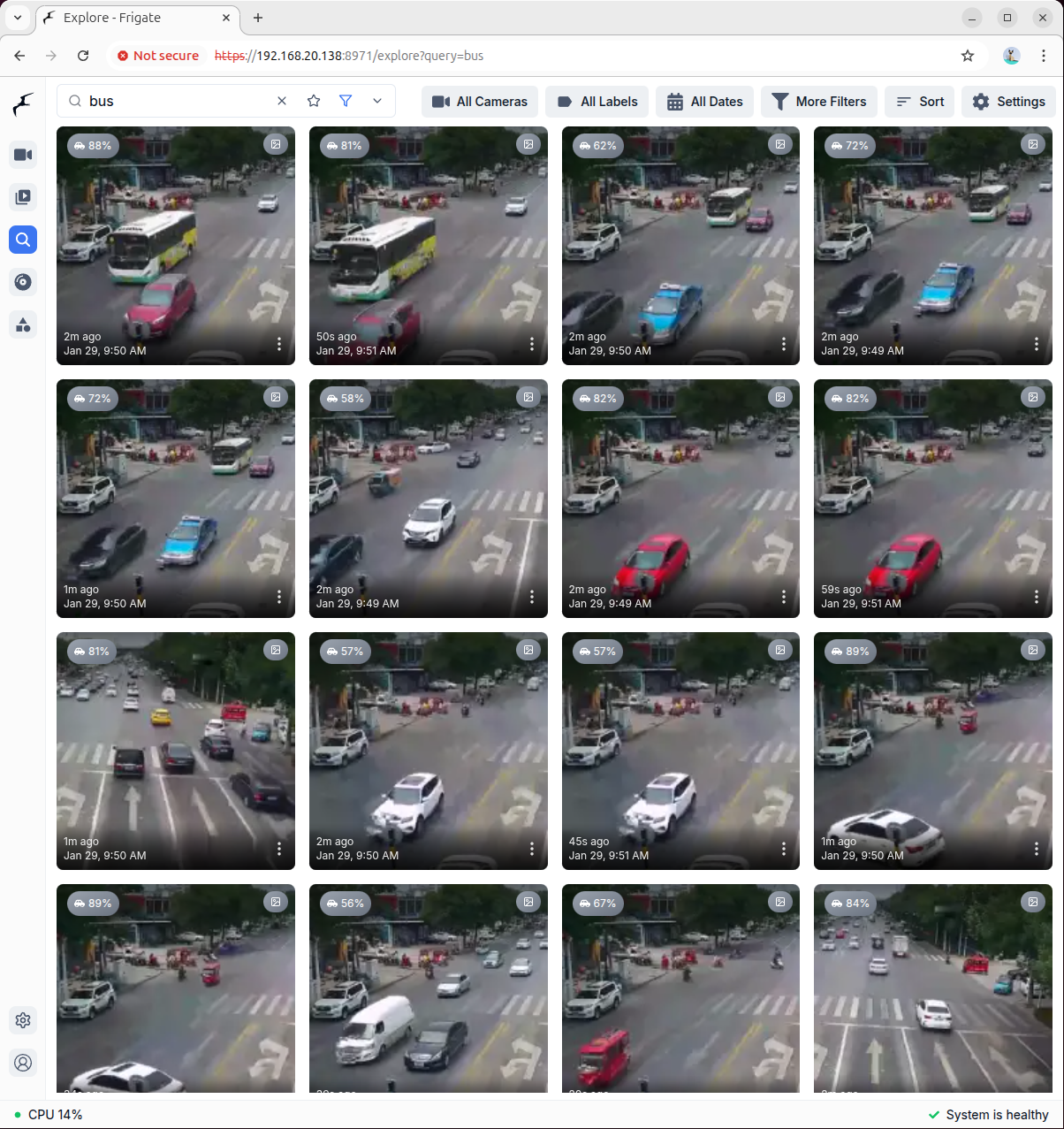
模型加载完成后,在搜索框输入您要检索的内容关键词,系统将自动检索并返回相关的视频截图:
更多信息
如需了解更多高级配置选项和功能说明,请参考 Frigate 官方文档
Page Tools