

StackFlow AI Platform
设备开发 & 快速上手
模型介绍
Qwen3
DeepSeek-R1
AI Pyramid 应用案例
Module LLM 应用案例
CV 视觉应用
VLM 多模态
LLM 大语言模型
语音助手
LLM630 Compute Kit - StackFlow API Yolo11n Demo
本案例将演示通过在 LLM630 Compute Kit 设备上运行脚本程序,通过 StackFlow 的 API 接口获取 yolo 的检测数据,并打印至终端。
1. 准备工作
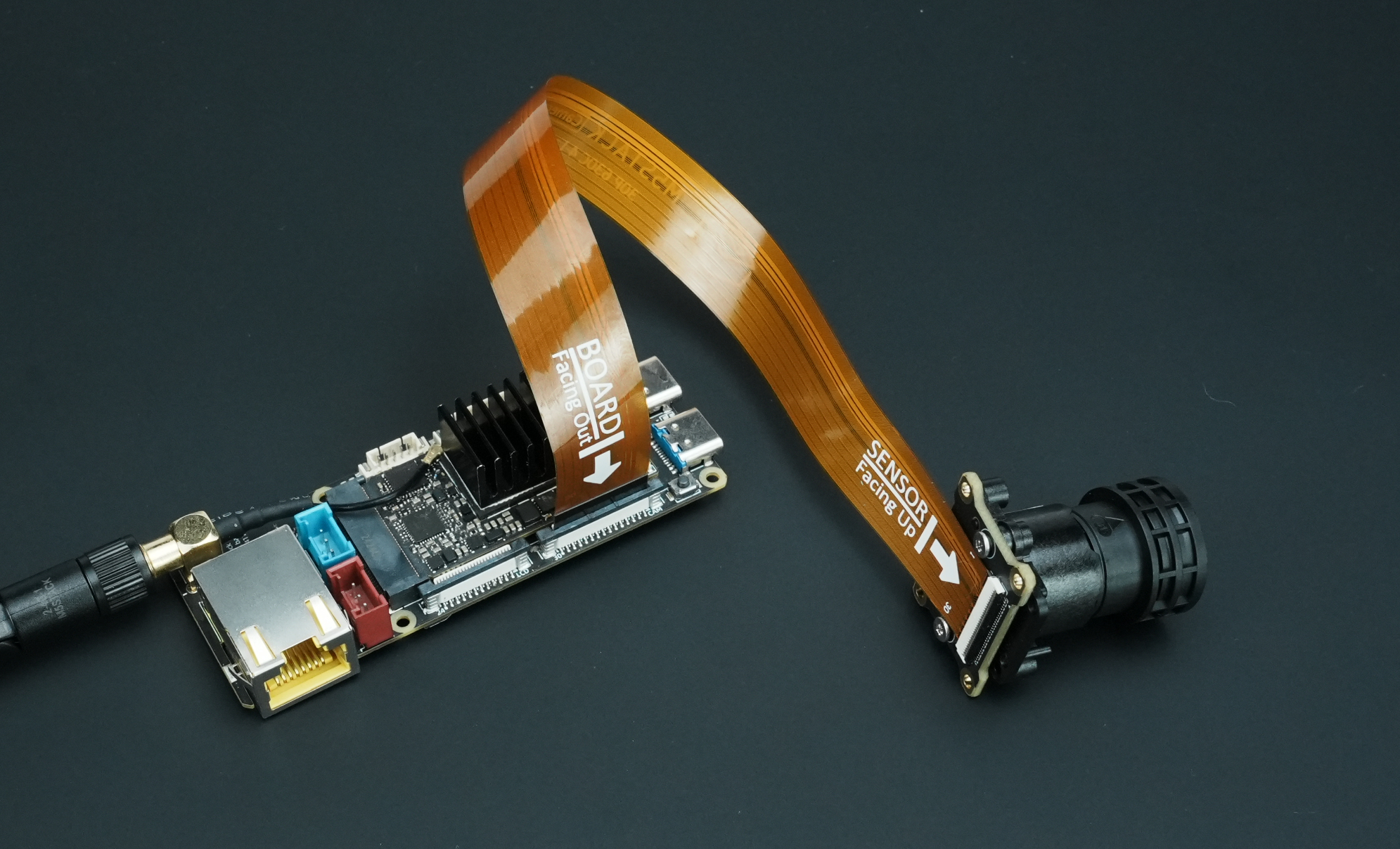
- 按照下图接线方式,在设备上电前通过 FPC 排线连接 CamModule SC850SL 摄像头 和 LLM630 Compute Kit
- 参考LLM630 Compute Kit UART / ADB / SSH 连接调试教程,学习如何为 LLM630 Compute Kit 配置网络与文件传输,并获取设备 IP 地址。
- 参考LLM630 Compute Kit 软件包更新教程,完成以下模型包和软件包的安装。
apt install llm-camera llm-yolo # SoftWare Package注意事项
CSI Camera 使用了 AI-ISP,在暗光下有非常好的成像效果,会使用一半的 NPU 算力用于 AI-ISP。默认的 YOLO 模型无法在开启 AI-ISP 模式下使用,需要通过以下命令安装支持 AI-ISP 的 YOLO 模型。
apt install llm-model-yolo11n-npu1 llm-model-yolo11n-pose-npu1 llm-model-yolo11n-hand-pose-npu1 # Model Package2. 客户端程序
下载客户端测试脚本,确保 PC 与 LLM630 Compute Kit 处于同一网段下。 复制并保存下方脚本,如果选择在电脑上运行,运行时需传入 LLM630 Compute Kit 实际的 IP 地址参数。
python llm-yolo.py --host 192.168.20.24如果选择在设备上直接运行,需要将代码文件上传到 LLM630 Compute Kit 运行时无需传入 IP 地址参数。
adb push llm-yolo.py /rootadb shellcd /root
python3 llm-yolo.pyimport argparse
import json
import select
import socket
import sys
import time
import platform
if platform.system() == "Windows":
import msvcrt
def create_tcp_connection(host, port):
sock = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
sock.connect((host, port))
return sock
def send_json(sock, data):
json_data = json.dumps(data, ensure_ascii=False) + '\n'
sock.sendall(json_data.encode('utf-8'))
recv_buffer = ""
def receive_response(sock):
global recv_buffer
while '\n' not in recv_buffer:
part = sock.recv(4096).decode('utf-8')
if not part:
break
recv_buffer += part
if '\n' in recv_buffer:
line, recv_buffer = recv_buffer.split('\n', 1)
return line.strip()
else:
line, recv_buffer = recv_buffer, ""
return line.strip()
def close_connection(sock):
if sock:
sock.close()
def create_init_data(response_format, device, enoutput, frame_height, frame_width, enable_webstream, rtsp):
return {
"request_id": "camera_001",
"work_id": "camera",
"action": "setup",
"object": "camera.setup",
"data": {
"response_format": "image.yuvraw.base64" if response_format =="yuv" else "image.jpeg.base64",
"input": device,
"enoutput": enoutput,
"frame_width": frame_width,
"frame_height": frame_height,
"enable_webstream": enable_webstream,
"rtsp": "rtsp.1280x720.h265" if rtsp == "h265" else "rtsp.1280x720.h264",
}
}
def parse_setup_response(response_data):
error = response_data.get('error')
if error and error.get('code') != 0:
print(f"Error Code: {error['code']}, Message: {error['message']}")
return None
return response_data.get('work_id')
def reset(sock):
sent_request_id = 'reset_000'
reset_data = {
"request_id": sent_request_id,
"work_id": "sys",
"action": "reset"
}
ping_data = {
"request_id": "ping_000",
"work_id": "sys",
"action": "ping"
}
send_json(sock, reset_data)
while True:
try:
send_json(sock, ping_data)
time.sleep(1)
except (BrokenPipeError, ConnectionResetError, OSError) as e:
return # Sock disconnection indicates reset is complete
def setup(sock, init_data):
sent_request_id = init_data['request_id']
send_json(sock, init_data)
while True:
response = receive_response(sock)
response_data = json.loads(response)
if response_data.get('request_id') == sent_request_id:
return parse_setup_response(response_data)
def exit_session(sock, deinit_data):
send_json(sock, deinit_data)
print("Exit")
def parse_inference_response(response_data):
error = response_data.get('error')
if error and error.get('code') != 0:
print(f"Error Code: {error['code']}, Message: {error['message']}")
return None
return {
"work_id": response_data.get("work_id"),
"object": response_data.get("object"),
"data": response_data.get("data")
}
def parse_yolo_result(data):
results = []
for item in data:
bbox = [float(x) for x in item.get('bbox', [])]
kps = [float(x) for x in item.get('kps', [])]
cls = item.get('class', '')
conf = float(item.get('confidence', 0))
results.append({
'bbox': bbox,
'class': cls,
'confidence': conf,
'kps': kps
})
return results
def main(args):
sock = create_tcp_connection(args.host, args.port)
frame_width, frame_height = args.imgsz
try:
print("Reset...")
reset(sock)
close_connection(sock)
sock = create_tcp_connection(args.host, args.port)
print("Setup Camera...")
init_data = create_init_data(
response_format = args.format,
enoutput=args.enoutput,
device=args.device,
frame_height=frame_height,
frame_width=frame_width,
enable_webstream=args.webstream,
rtsp=args.rtsp
)
camera_work_id = setup(sock, init_data)
if camera_work_id is not None:
print(f"Camera setup with work_id: {camera_work_id}")
else:
print("Camera setup failed.")
return
print("Setup Yolo...")
yolo_init_data = {
"request_id": "yolo_001",
"work_id": "yolo",
"action": "setup",
"object": "yolo.setup",
"data": {
"model": args.model,
"response_format": "yolo.box",
"input": camera_work_id,
"enoutput": True,
}
}
yolo_work_id = setup(sock, yolo_init_data)
if yolo_work_id is not None:
print(f"Yolo setup with work_id: {yolo_work_id}")
else:
print("Yolo setup failed.")
return
while True:
if platform.system() == "Windows":
if msvcrt.kbhit():
key = msvcrt.getwch()
if key == 'q':
print("Quit by user.")
break
else:
if sys.stdin in select.select([sys.stdin], [], [], 0)[0]:
key = sys.stdin.readline().strip()
if key == 'q':
print("Quit by user.")
break
response = receive_response(sock)
if not response:
continue
response_data = json.loads(response)
Rawdata = parse_inference_response(response_data)
if Rawdata is None:
break
work_id = Rawdata.get("work_id")
object = Rawdata.get("object")
data = Rawdata.get("data")
if work_id == yolo_work_id and object == "yolo.box":
yolo_results = parse_yolo_result(data)
print(f"YOLO Results: {yolo_results}")
exit_session(sock, {
"request_id": "yolo_exit",
"work_id": yolo_work_id,
"action": "exit"
})
exit_session(sock, {
"request_id": "camera_exit",
"work_id": camera_work_id,
"action": "exit"
})
time.sleep(3) # Allow time for the exit command to be processed
finally:
close_connection(sock)
if __name__ == "__main__":
parser = argparse.ArgumentParser(description="TCP Client to send JSON data.")
parser.add_argument("--host", type=str, default="localhost", help="Server hostname (default: localhost)")
parser.add_argument("--port", type=int, default=10001, help="Server port (default: 10001)")
parser.add_argument("--device", type=str, default="axera_single_sc850sl", help="Camera name, i.e. axera_single_sc850sl or /dev/video0")
parser.add_argument("--enoutput", type=bool, default=False, help="Whether to output image data")
parser.add_argument("--format", "--output-format", type=str, default="yuv", help="Output image data format, i.e. jpeg or yuv")
parser.add_argument("--imgsz", "--img", "--img-size", nargs="+", type=int, default=[320, 320], help="image (h, w)")
parser.add_argument("--webstream", action="store_true", help="Enable webstream")
parser.add_argument("--rtsp", default="h264", help="rtsp output, i.e. h264 or h265")
parser.add_argument("--model", type=str, default="yolo11n-npu1", help="Model name, i.e. yolo11n-npu1 or yolo11n-pose-npu1, yolo11n-hand-pose-npu1")
args = parser.parse_args()
main(args)参数解析
- host:LLM630 Compute Kit 的 IP 地址
- port:TCP 通信端口,默认 10001
- device:摄像头名称,MIPI CSI 摄像头为 'axera_single_sc850sl',如果使用 USB video camera,根据实际设备填写。例如 '/dev/video0'
- enoutput:是否输出图像数据,默认关闭
- format:输出的图像格式,默认 'yuv',可以选择 'jpeg'
- imgsz:输出的图像尺寸,默认 '320*320'
- webstream:是否开启网页浏览,默认关闭,打开后,浏览器访问 'http://IP:8989/' 即可访问,注意 IP 替换为 LLM630 Compute Kit 的 IP 地址
- rtsp:输出的 rstp 视频流编码,默认 'h264',可以选择 'h265'
- model:加载的 yolo 模型,默认 'yolo11n-npu1',可以选择 'yolo11n-pose-npu1' 或 'yolo11-hand-pose-npu1'
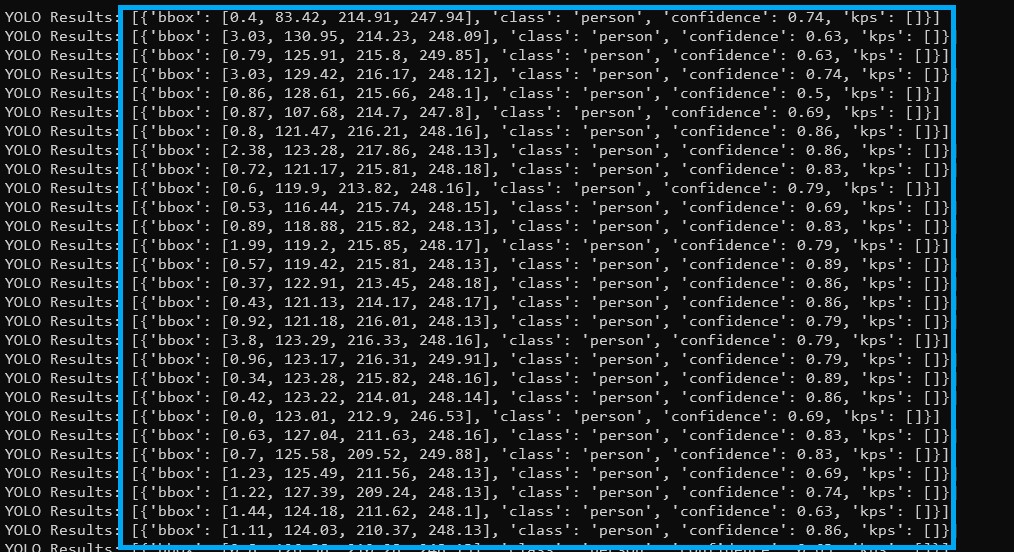
3. 开始交互
终端将打印 yolo 检测结果。
Page Tools