产品上手指引
Linux PC
AI 加速卡
LLM-8850 Card
大语言模型
实时 AI 语音助手
火山引擎语音助手
工业控制
输入设备
Ezdata
Ethernet 摄像头
PoECAM
Wi-Fi 摄像头
Unit CamS3/-5MP
AI 摄像头
LoRa & LoRaWAN
电机驱动
恢复出厂固件教程
拨码开关&引脚切换
BALA 上手指南
为了使用 M5Bala, 需要 M5Stack FIRE 或 M5GO (白色)。

开发环境
UiFlow 编辑
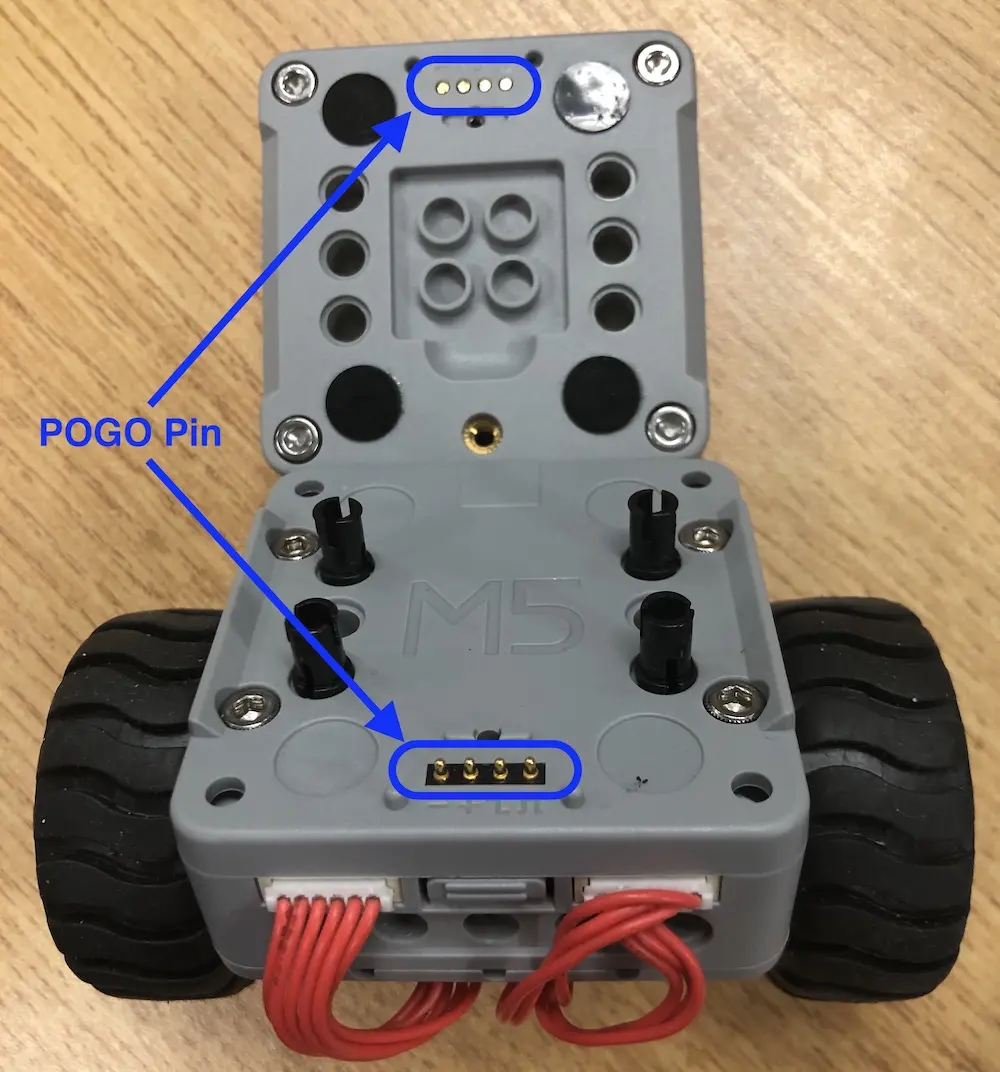
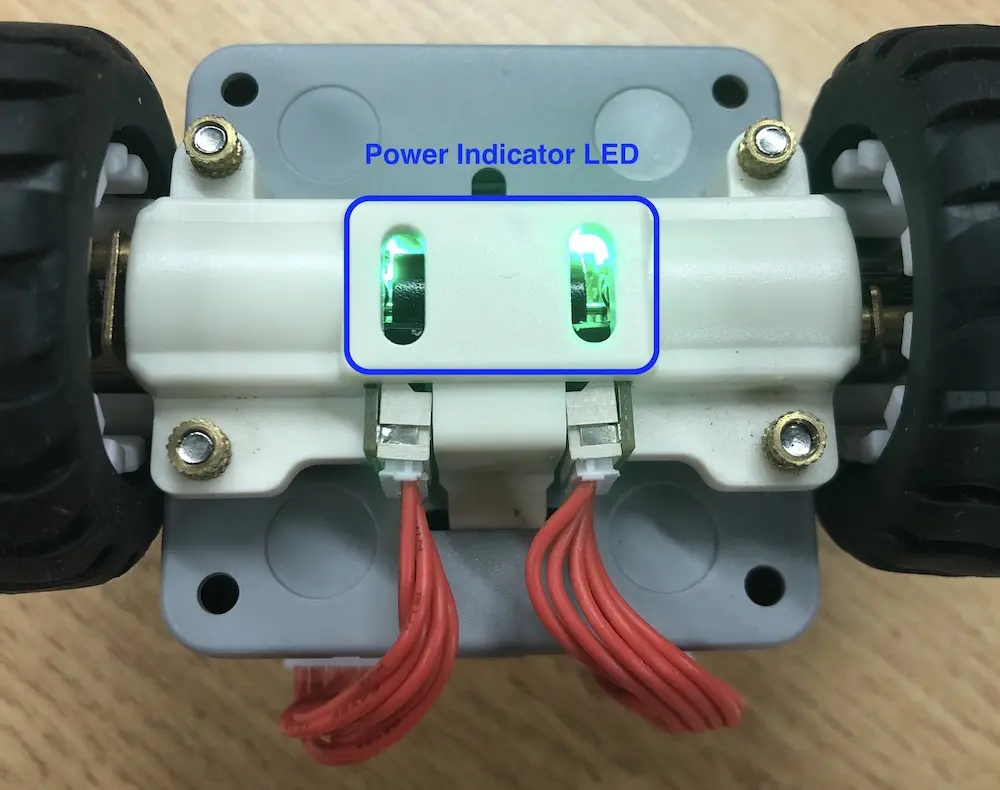
- 单击 M5Core 侧边的红色按键开机 (快速双击为关机)
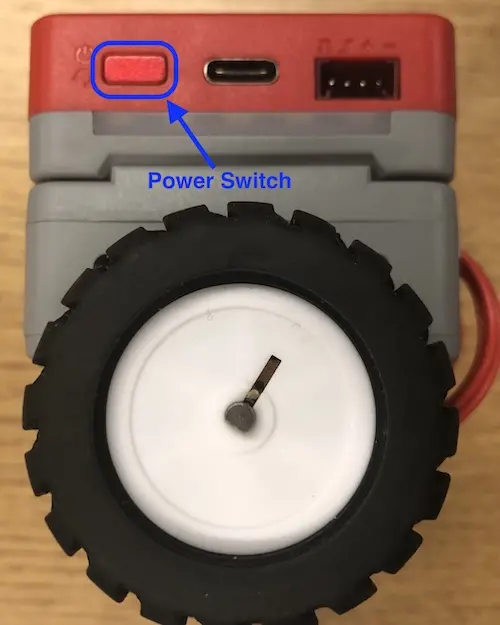
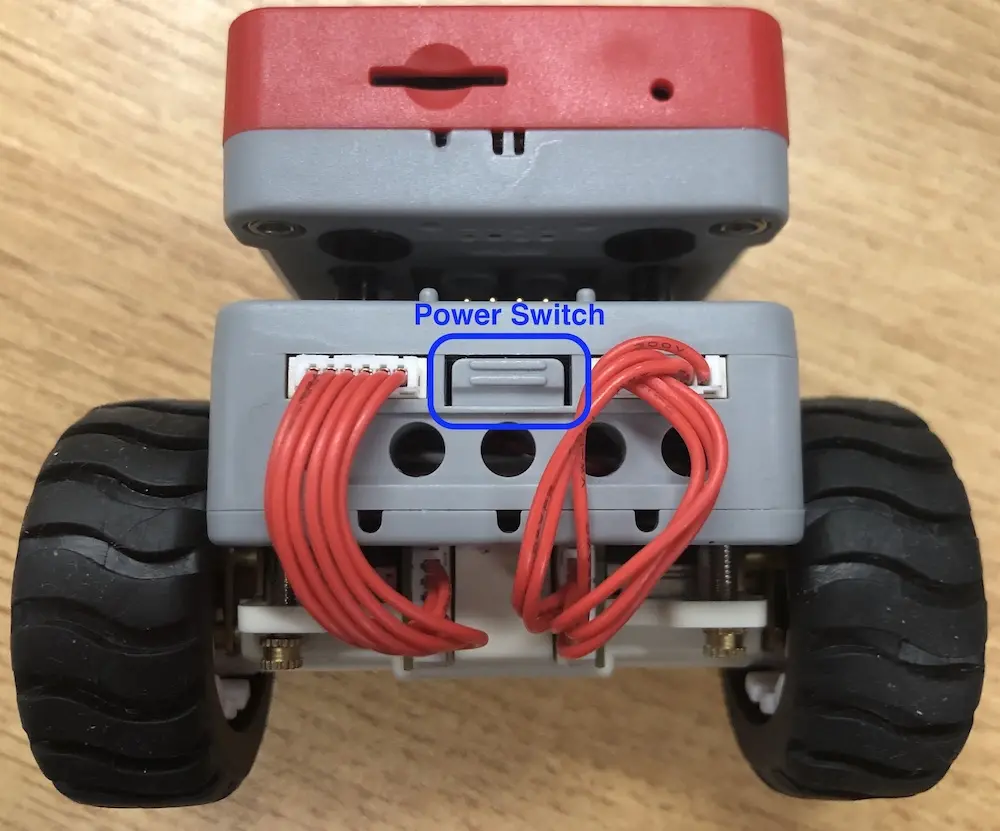
- 单击 M5Bala 底座的按键启动电源 (连续点击两次时关闭电源).
- 访问 UiFlow , 将编程模式
Blockly切换至Python.
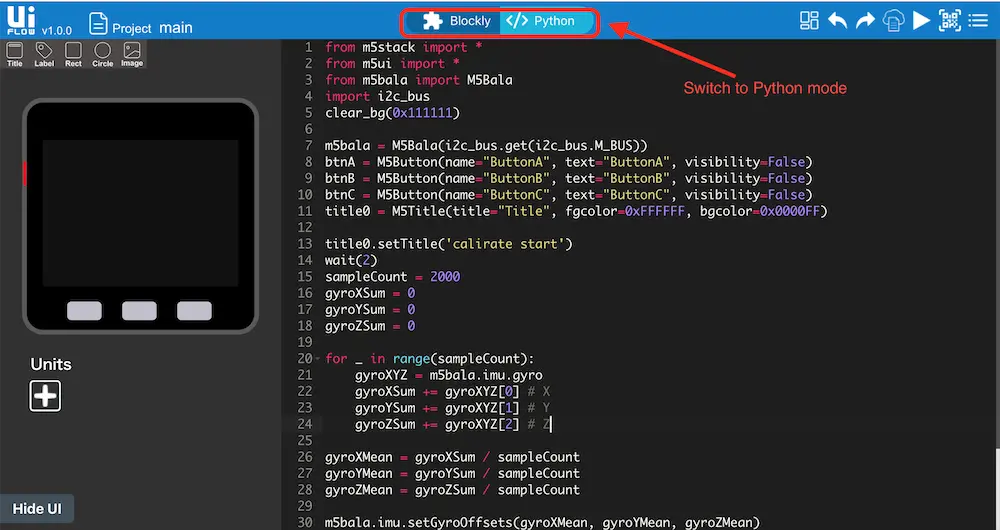
- 复制粘贴以下代码,并执行程序.
from m5stack import *
from m5ui import *
from m5bala import M5Bala
import i2c_bus
clear_bg(0x111111)
m5bala = M5Bala(i2c_bus.get(i2c_bus.M_BUS))
btnA = M5Button(name="ButtonA", text="ButtonA", visibility=False)
btnB = M5Button(name="ButtonB", text="ButtonB", visibility=False)
btnC = M5Button(name="ButtonC", text="ButtonC", visibility=False)
title0 = M5Title(title="Title", fgcolor=0xFFFFFF, bgcolor=0x0000FF)
title0.setTitle('calirate start')
wait(2)
sampleCount = 2000
gyroXSum = 0
gyroYSum = 0
gyroZSum = 0
for _ in range(sampleCount):
gyroXYZ = m5bala.imu.gyro
gyroXSum += gyroXYZ[0] # X
gyroYSum += gyroXYZ[1] # Y
gyroZSum += gyroXYZ[2] # Z
gyroXMean = gyroXSum / sampleCount
gyroYMean = gyroYSum / sampleCount
gyroZMean = gyroZSum / sampleCount
m5bala.imu.setGyroOffsets(gyroXMean, gyroYMean, gyroZMean)
title0.setTitle('balance start')
while True:
m5bala.balance()
wait(0.001)Arduino IDE 编辑
- 在 Arduino IDE 的库管理安装
m5stack库
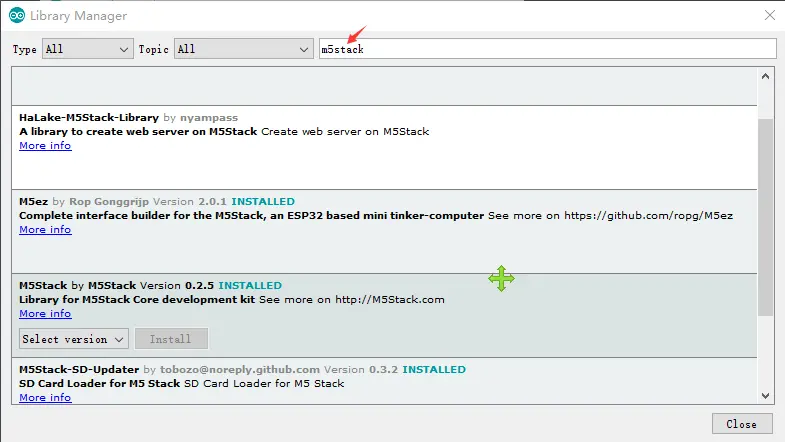
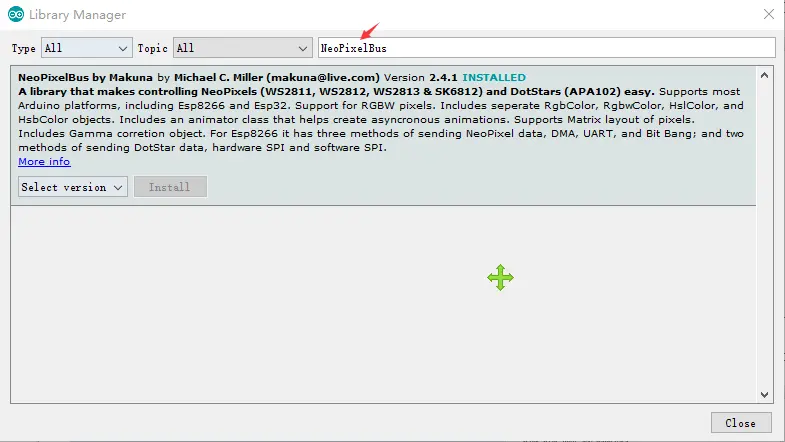
- 在 Arduino IDE 的库管理安装
NeoPixelBus库
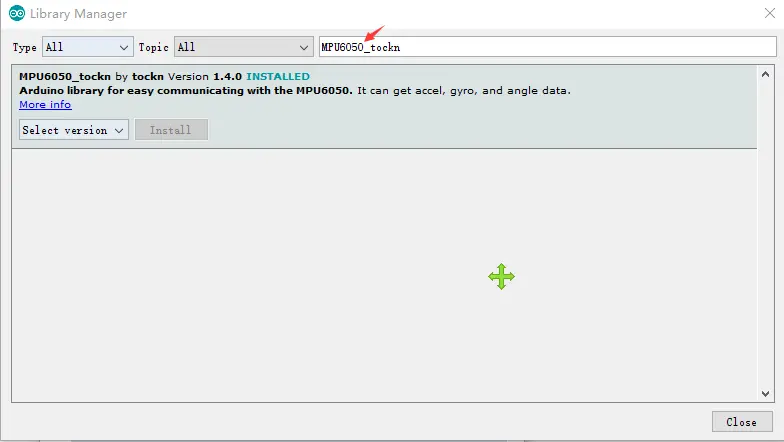
- 在 Arduino IDE 的库管理安装
MPU6050_tockn库
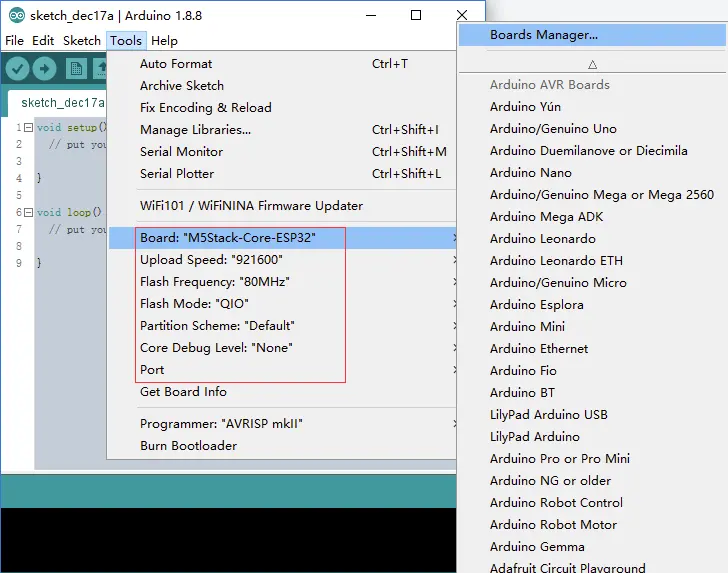
将 M5Core 连接至电脑。点击
Tools->Port中选择设备使用的串行端口.开发板
Board选项选择M5Stack-Core-ESP32或M5Stack-Fire.
- 使用 Shell 命令下载 M5Bala案例程序 . 如果你还未安装 Git, 请点击此处 进行下载.
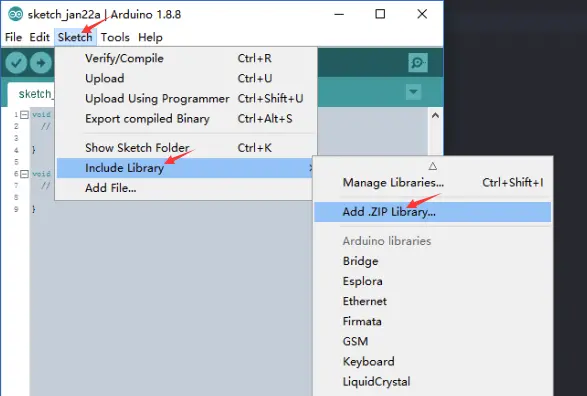
git clone --recursive https://github.com/m5stack/M5Bala.git- 点击
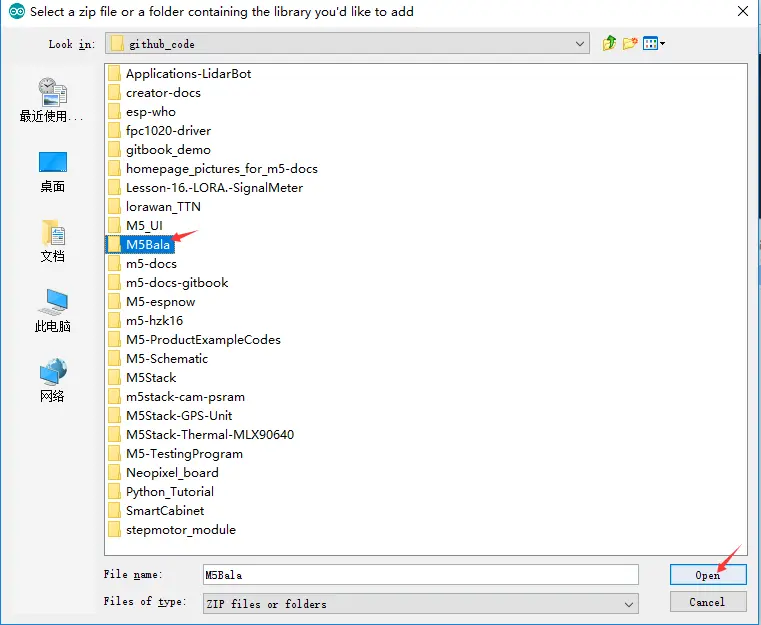
Sketch->Include Library->Add .ZIP Library.... 选择下载好的M5Bala的文件
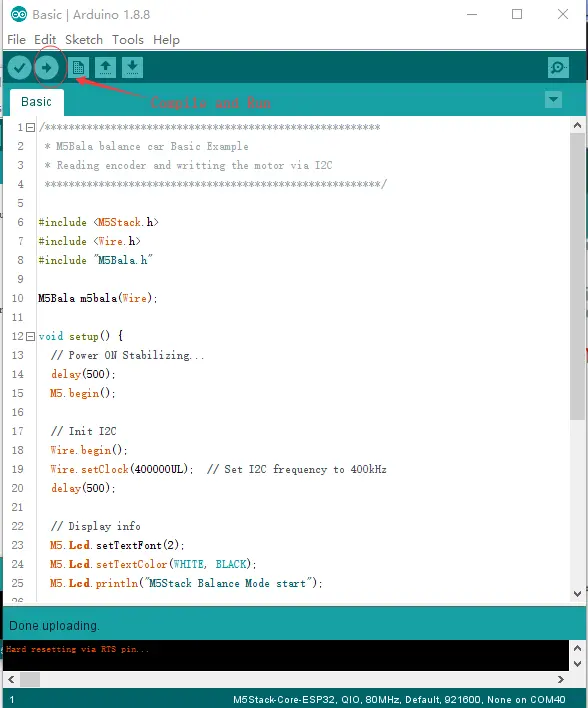
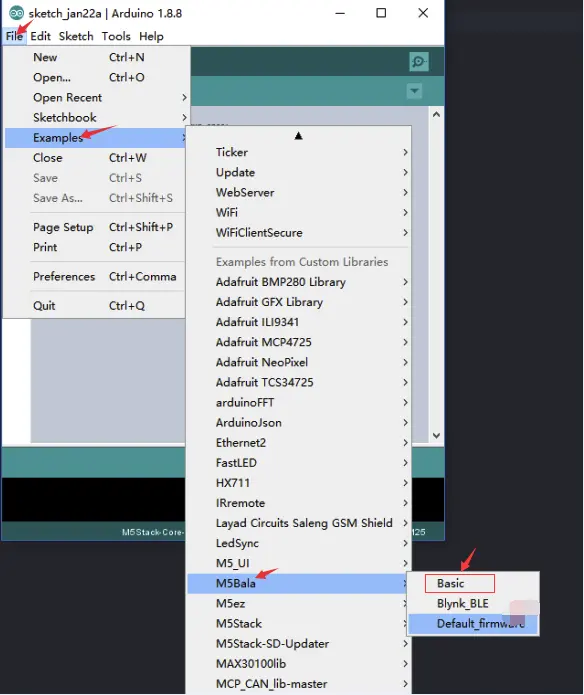
- 打开 BALA 程序案例:点击
File->Examples->M5Bala->Basic.
- 编译并上传程序.