


产品上手指引
Linux PC
CardputerZero
AI 加速卡
LLM-8850 Card
AI 智能体
实时 AI 语音助手
火山引擎语音助手
工业控制
Ethernet 摄像头
PoECAM
Wi-Fi 摄像头
Unit CamS3/-5MP
AI 摄像头
LoRa & LoRaWAN
电机驱动
恢复出厂固件教程
拨码开关&引脚切换
V-function
功能介绍
V-Function 是由 M5Stack 团队针对M5StickV/UnitV设备开发的多个视觉识别功能固件,摄像头在完成视觉识别后通过串口输出(115200bps)识别结果, 基于不同的功能固件 (对象追踪,移动检测等), 用户能够快速的进行视觉识别的功能的搭建。本教程将向你介绍,如何烧录固件至你的设备中,并通过 UiFlow 图形化编程进行调用。
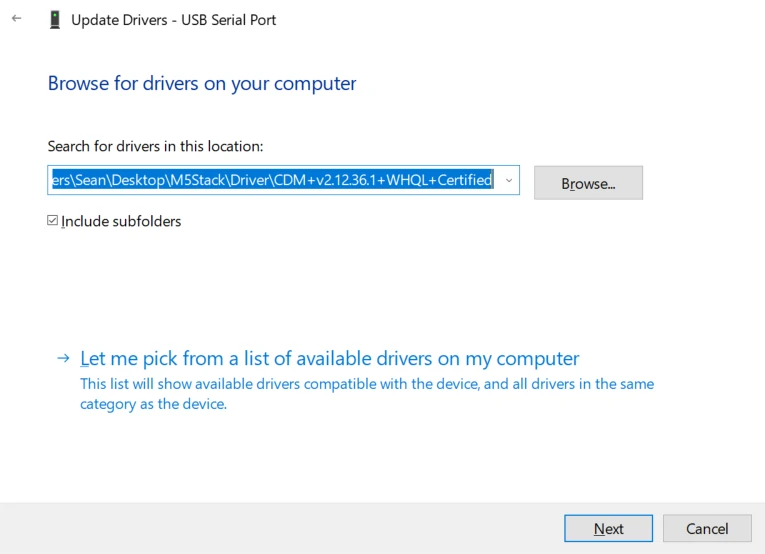
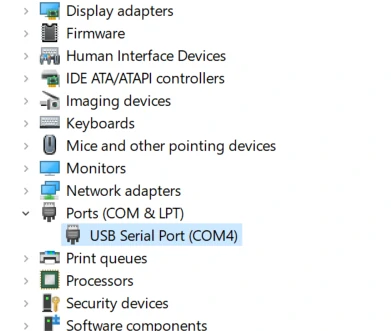
驱动安装
M5Stack或USB Serial, Windows 推荐使用驱动文件在设备管理器直接进行安装 (自定义更新), 可执行文件安装方式可能无法正常工作)。点击此处,前往下载FTDI驱动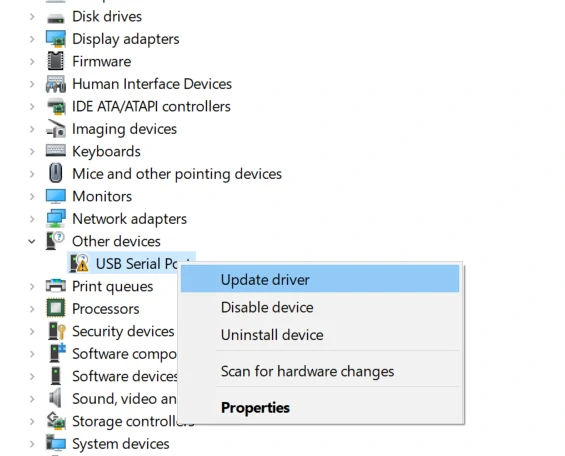
系统偏好设置 - >安全性与隐私 - >通用 - >允许以下位置下载的App - > App Store和认可的开发者选项。烧录固件
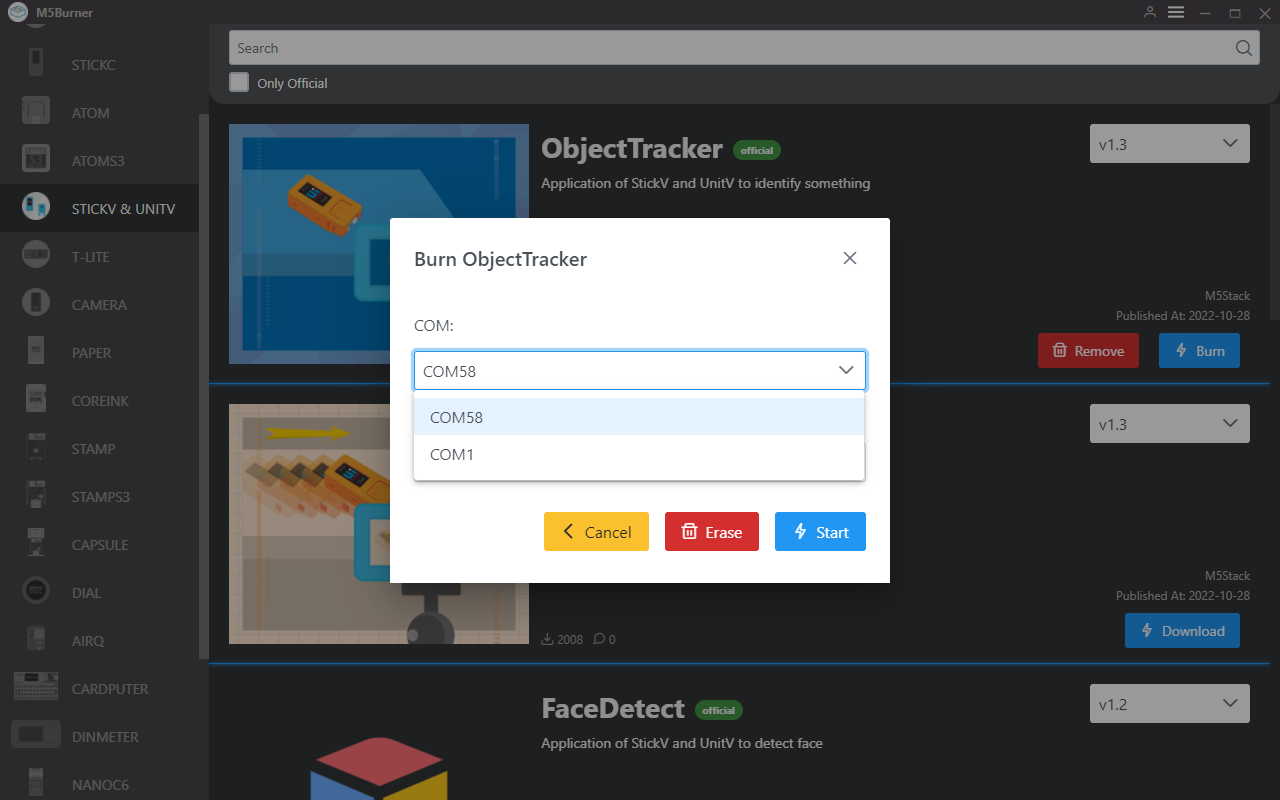
请根据您所使用的操作系统,点击下方按钮下载相应的 M5Burner 固件烧录工具。解压打开应用程序。
左侧设备栏选择设备为 M5StickV/UnitV, 根据使用需求选择对应的功能固件,进行下载。 将 M5StickV/UnitV 通过数据线连接至电脑,选择其对应的端口,点击 Burn 开始烧录。
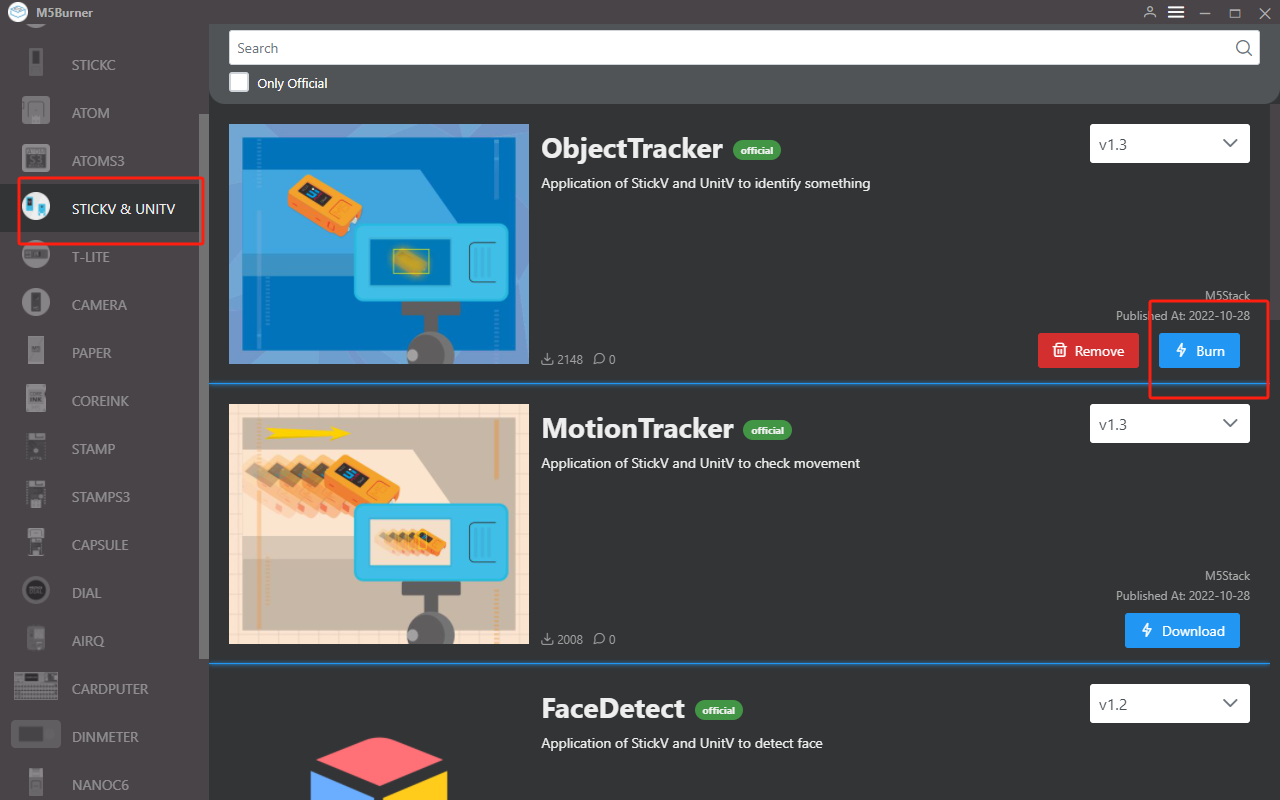
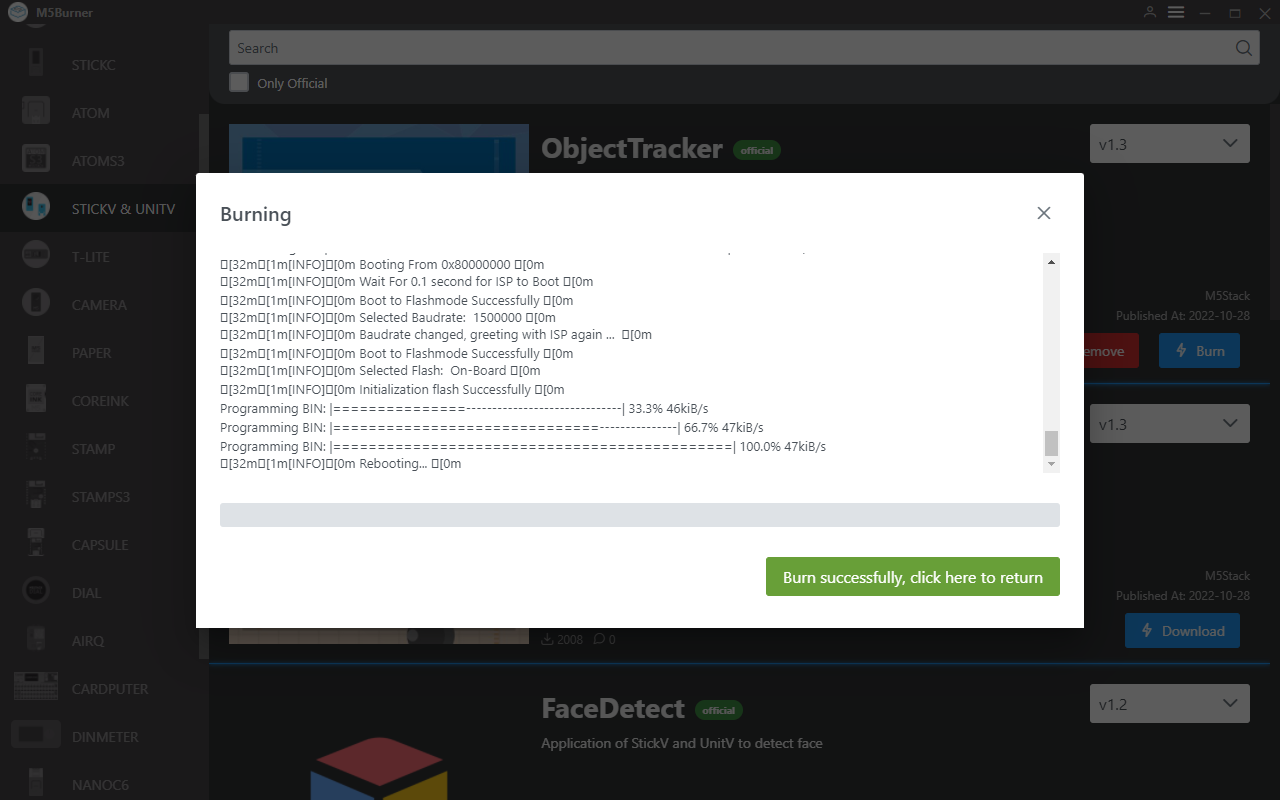
当烧录日志提示Burn Successfully时,则表示固件已经烧录完成。
UiFlow 引用
烧录完功能固件的 M5StickV/UnitV 将作为 Unit 形式的从设备进行使用,因此用户需要使用其他的 M5 主机设备来与其交互。关于其他主控产品的 UiFlow 基本使用与操作,请访问其对应的产品文档页面进行获取。
访问https://flow.m5stack.com/ 进入 UiFlow。 点左侧功能面板中的 Unit 添加按钮,选中 UnitV 拓展进行添加。添加时,请根据实际使用的端口,进行配置。点击 ok 进行添加。
添加完成后,在功能块菜单中的 Unit 选项,即可找到包含的功能块。将其拖拽至右侧编程区域,即可进行使用。详细的 Block 功能说明,请点击下方 UiFlow Block 文档查看。
运动目标检测
检测当面画面的变化情况,判断检测区域内的物体是否存在运动。
运动目标检测 - 数据包格式
返回数据 JSON
{
"FUNC": "MOTION DETECT V1.0",
"DIFF TOTAL": 10000, //画面变动率
"DIFF MAX": 75, // 最高变化率
"TOTAL": 3, //边界框数量
"0": {
"x": 45,
"y": 18,
"w": 126,
"h": 72,
"area": 342 //该边界框内变化像素的数量
},
"1": {
"x": 0,
"y": 169,
"w": 130,
"h": 24,
"area": 173
},
"2": {
"x": 39,
"y": 204,
"w": 276,
"h": 34,
"area": 141
}
}
设置 JSON
{
"MOTION DETECT": 1.0, //功能标记,不可缺省
"mode": "COMPUTE_MODE_STATIC", //可缺省 "COMPUTE_MODE_STATIC" 静态检测模式 or "COMPUTE_MODE_DYNAMIC" 动态检测模式
"thr_w": 20, //可缺省 边界框宽阈值,[3,200]
"thr_h": 20, //可缺省 边界框长阈值,[3,200]
"stepx": 1, //可缺省 X扫描间隔,[0, 40],设置为0则关闭边界框检测
"stepy": 2, //可缺省 Y扫描间隔,[0, 40],设置为0则关闭边界框检测
"delta": 20, //可缺省 变化率阈值,[0, 99]
"merge": 10 //可缺省 边界框合并阈值,[0, 40]
}
目标追踪
设置追踪目标,实时获取目标对象处于画面中位置信息。
目标追踪 - 数据包格式
返回数据 JSON
{
"FUNC": "TARGET TRACKER V1.0",
"x": 282,
"y": 165,
"w": 13,
"h": 15
}
设置 JSON
{
"TARGET TRACKER": " V1.0",
"x": 282, //xywh均不可缺省
"y": 165,
"w": 13,
"h": 15
}
颜色追踪
设置 LAB 颜色阈值,追踪画面中符合阈值目标,并实时获取目标对象处于画面中位置信息。
颜色追踪 - 数据包格式
返回数据 JSON
{
"FUNC": "COLOR TRACKER V1.0",
"TOTAL": 3, //边界框数量
"0": {
"x": 45,
"y": 18,
"w": 126,
"h": 72,
"area": 342 //该边界框内变化像素的数量
},
"1": {
"x": 0,
"y": 169,
"w": 130,
"h": 24,
"area": 173
},
"2": {
"x": 39,
"y": 204,
"w": 276,
"h": 34,
"area": 141
}
}
设置 JSON
{
"COLOR TRACKER": 1.0, //功能标记,不可缺省
"thr_w": 20, //可缺省 边界框宽阈值,[3,200]
"thr_h": 20, //可缺省 边界框长阈值,[3,200]
"stepx": 1, //可缺省 X扫描间隔,[0, 40],设置为0则关闭边界框检测
"stepy": 2, //可缺省 Y扫描间隔,[0, 40],设置为0则关闭边界框检测
"merge": 10, //可缺省 边界框合并阈值,[0, 40]
"Lmin": 0, //可缺省 L阈值下限 [0, 100]
"Lmax": 0, //可缺省 L阈值上限 [0, 100]
"Amin": 0, //可缺省 A阈值下限 [0, 255]
"Amax": 0, //可缺省 A阈值上限 [0, 255]
"Bmin": 0, //可缺省 B阈值下限 [0, 255]
"Bmax": 0, //可缺省 B阈值上限 [0, 255]
}
人脸识别
识别画面中的人脸信息,并返回识别个数,对象坐标,置信率。
人脸识别 - 数据包格式
返回数据 JSON
{
"FUNC": "FACE DETECT", // 功能说明
"count": 3, // 识别到的人脸数量
"2": { // 人脸编号
"x": 97, // ROI
"y": 26,
"w": 64,
"h": 86,
"value": 0.859508, // 置信率
"classid": 0,
"index": 2,
"objnum": 3
},
"1": {
"x": 70,
"y": 157,
"w": 38,
"h": 63,
"value": 0.712100,
"classid": 0,
"index": 1,
"objnum": 3
},
"0": {
"x": 199,
"y": 145,
"w": 31,
"h": 40,
"value": 0.859508,
"classid": 0,
"index": 0,
"objnum": 3
}
}
二维码识别
识别画面中的二维码,并返回识别结果,以及版本。使用固件Find code
返回数据 JSON
{
"count": 1,
"FUNC": "FIND QRCODE",
"0": {
"x": 57,
"y": 16,
"w": 197,
"h": 198,
"payload": "m5stack", //二维码数据
"version": 1, //二维码版本
"ecc_level": 1, //二维码ECC水平
"mask": 2, //二维码掩码
"data_type": 4, //二维码数据类型
"eci": 0 //返回二维码的ECI。
}
}
条形码识别
识别画面中的条形码,并返回识别结果,以及版本。使用固件Find code
返回数据 JSON
{
"0": {
"x": 62,
"y": 90,
"w": 100,
"h": 45,
"payload": "123", //数据
"type": 15, //条码类别
"rotation": 0.000000, //条码旋转角度
"quality": 28 //条码在图像中被扫描的次数
},
"count": 1,
"FUNC": "FIND BARCODE"
}
Datamatrix 码识别
识别画面中的 Datamatrix 码,并返回识别结果,以及码旋转角度,坐标数据。使用固件Find code
返回数据 JSON
{
"0": {
"x": 20,
"y": 116,
"w": 96,
"h": 96,
"payload": "m5stack",
"rotation": 1.588250, //DM码旋转角度
"rows": 16, //DM码行数
"columns": 16, //DM码列数
"capacity": 12, //DM码容量(字节)
"padding": 1 //DM码剩余容量(字节)
},
"count": 1,
"FUNC": "FIND DATAMATRIX"
}
Apriltag 码识别
识别画面中的 Apriltag 码 (仅支持 Tag36H11 类型), 并获取其位置的偏移。使用固件Find code
返回数据 JSON
{
"0": {
"x": 71,
"y": 5,
"w": 85,
"h": 88,
"id": 1,
"family": 16,// AprilTag的类别
"cx": 115,
"cy": 49,
"rotation": 6.219228,// 返回以弧度计的AprilTag的旋度(int)。
"decision_margin": 0.451959,// AprilTag匹配的色饱和度(取值0.0 - 1.0),其中1.0为最佳。
"hamming": 0,// AprilTag的可接受的数位误差数值
"goodness": 0.000000, //AprilTag图像的色饱和度
"x_translation": 0.868200, //旋转后将图像移动到左侧或右侧的单位数
"y_translation": 0.245313,//旋转后将图像上移或下移的单位数
"z_translation": -2.725188,//是通过图像缩放的量。默认情况下1.0
"x_rotation": 3.093776,//x轴在帧缓冲器中旋转图像的度数
"y_rotation": 0.065489,//y轴在帧缓冲器中旋转图像的度数
"z_rotation": 6.219228 //z轴在帧缓冲器中旋转图像的度数
},
"count": 1,
"FUNC": "FIND APRILTAG"
}
识别模式设置 JSON
以上多个识别码功能,均使用同一个固件Find Code实现,用户可以通过发送下方 JSON 数据,配置模式切换。
{
"FIND CODE": 1.0,
"mode":"DATAMATRIX" //识别模式,可选QRCODE,APRILTAG,DATAMATRIX,BARCODE
}自定义标签识别
检测画面中的标签卡,并返回二进制序列。注:仅识别固定标签卡格式,请参考下方图片
自定义标签识别 - 数据包格式
返回数据 JSON
{
"FUNC": "TAG READER V2.0",
"TOTAL": 1,
"0": {
"x": 113,
"y": 65,
"w": 117,
"h": 105,
"p0x": 113, // p0x ~ p3y: TAG 4个顶点的坐标
"p0y": 77,
"p1x": 211,
"p1y": 65,
"p2x": 230,
"p2y": 156,
"p3x": 127,
"p3y": 170,
"rotation": 8, // TAG 的相对旋转角度
"rows": 8, // TAG 的行数(本数值不含定位框)
"columns": 8, // TAG 的列数(本数值不含定位框)
"size": 64, // TAG 实际内容的数据长度,该值 = 内容的行数 * 内容的列数 = (rows) * (columns)
"code": "0x003C42425A424200", // uint64_t类型的内容二进制代码,本键值最大编码64位(8 x 8)的TAG
"binstr": "0000000000111100010000100100001001011010010000100100001000000000" //二进制数据的字符串形式,本键值可以编码任意长宽的TAG
}
}
巡线
检测画面中指定的颜色线条,并返回偏移角度。
巡线 - 数据包格式
返回数据 JSON
{
"FUNC": "LINE TRACKER V1.0",
"angle": 3.8593475818634033 //小车转弯的角度
}
设置 JSON
{
"LINE TRACKER": 1.0, //功能标记,不可缺省
"thr_w": 20, //可缺省 边界框宽阈值,[3,200]
"thr_h": 20, //可缺省 边界框长阈值,[3,200]
"stepx": 1, //可缺省 X扫描间隔,[0, 40],设置为0则关闭边界框检测
"stepy": 2, //可缺省 Y扫描间隔,[0, 40],设置为0则关闭边界框检测
"merge": 10, //可缺省 边界框合并阈值,[0, 40]
"Lmin": 0, //可缺省 L阈值下限 [0, 100]
"Lmax": 0, //可缺省 L阈值上限 [0, 100]
"Amin": 0, //可缺省 A阈值下限 [0, 255]
"Amax": 0, //可缺省 A阈值上限 [0, 255]
"Bmin": 0, //可缺省 B阈值下限 [0, 255]
"Bmax": 0, //可缺省 B阈值上限 [0, 255]
"weight_0": 0.1, // 可缺省 权重
"weight_1": 0.3, // 可缺省 权重
"weight_2": 0.7 // 可缺省 权重
}
相关内容
常见问题
使用将从设备 (M5StickV/UnitV) 连接至主控后,主控端若存在数据获取不正常情况,请重启 M5StickV/UnitV。等待固件启动成功后重新尝试连接。