Arduino Quick Start
2. Devices & Examples
3. M5Unified
4. M5GFX
5. Extensions
Unit
Atomic
Tab5
IoT
Accessories
StickC-Plus IMU
Example
cpp
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50
#include <M5StickCPlus.h>
float accX = 0.0F;
float accY = 0.0F;
float accZ = 0.0F;
float gyroX = 0.0F;
float gyroY = 0.0F;
float gyroZ = 0.0F;
float pitch = 0.0F;
float roll = 0.0F;
float yaw = 0.0F;
void setup() {
M5.begin(); // Init M5StickC Plus
M5.Imu.Init(); // Init IMU
M5.Lcd.setRotation(3); // Rotate the screen
M5.Lcd.fillScreen(BLACK);
M5.Lcd.setTextSize(1);
M5.Lcd.setCursor(80, 15); // Set the cursor location
M5.Lcd.println("IMU TEST");
M5.Lcd.setCursor(30, 30);
M5.Lcd.println(" X Y Z");
M5.Lcd.setCursor(30, 70);
M5.Lcd.println(" Pitch Roll Yaw");
}
void loop() {
static float temp = 0;
M5.IMU.getGyroData(&gyroX, &gyroY, &gyroZ);
M5.IMU.getAccelData(&accX, &accY, &accZ);
M5.IMU.getAhrsData(&pitch, &roll, &yaw);
M5.IMU.getTempData(&temp);
M5.Lcd.setCursor(30, 40);
M5.Lcd.printf("%6.2f %6.2f %6.2f ", gyroX, gyroY, gyroZ);
M5.Lcd.setCursor(170, 40);
M5.Lcd.print("o/s");
M5.Lcd.setCursor(30, 50);
M5.Lcd.printf(" %5.2f %5.2f %5.2f ", accX, accY, accZ);
M5.Lcd.setCursor(170, 50);
M5.Lcd.print("G");
M5.Lcd.setCursor(30, 80);
M5.Lcd.printf(" %5.2f %5.2f %5.2f ", pitch, roll, yaw);
M5.Lcd.setCursor(30, 95);
M5.Lcd.printf("Temperature : %.2f C", temp);
delay(100);
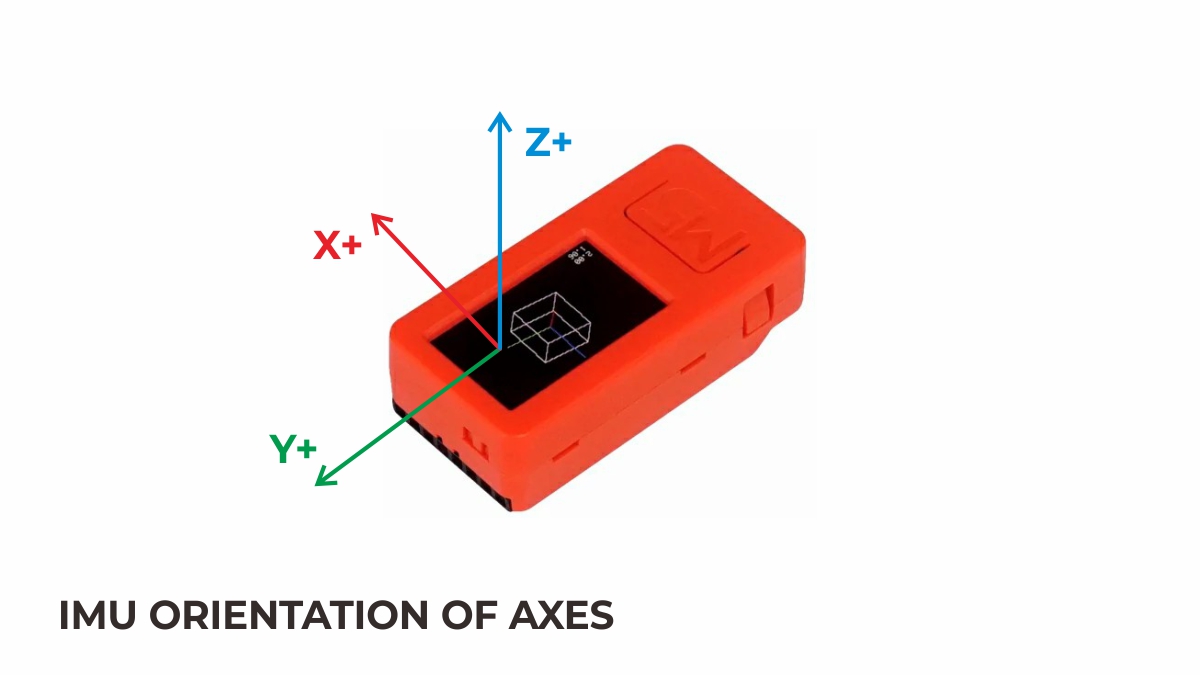
}IMU Triaxial Direction Schematic Diagram