


Home Assistant
Media Player
Expansion
Sensor
StackChan Home Assistant Integration

StackChan is a super cute AI desktop robot created jointly by M5Stack and the user community. It is powered by the M5Stack flagship IoT development kit CoreS3 with an ESP32-S3 main controller, a 240 MHz dual-core processor, 16MB flash, and 8MB PSRAM. It supports Wi-Fi and BLE. The host also includes a 2.0-inch tough glass capacitive touchscreen, 0.3 MP camera, proximity sensor, nine-axis motion sensor (accelerometer + gyroscope + geomagnetic), microSD card slot, 1W speaker, dual microphones, and power/reset buttons.
This article introduces how to integrate a variety of StackChan peripherals. If you need a ready-to-use voice assistant, please refer to:
If you need to download pre-built firmware yourself, check the GitHub Release.
Requirements
- A Home Assistant host.
- Install and enable ESPHome Builder in Home Assistant.
Quick Start
Click the button below to flash the firmware in one click. Follow the on-screen instructions to complete the setup and quickly experience StackChan integrated with Home Assistant. For details on one-click flashing and subsequent configuration, please refer to the tutorial.
2026.3 Initial firmware
Create the Device
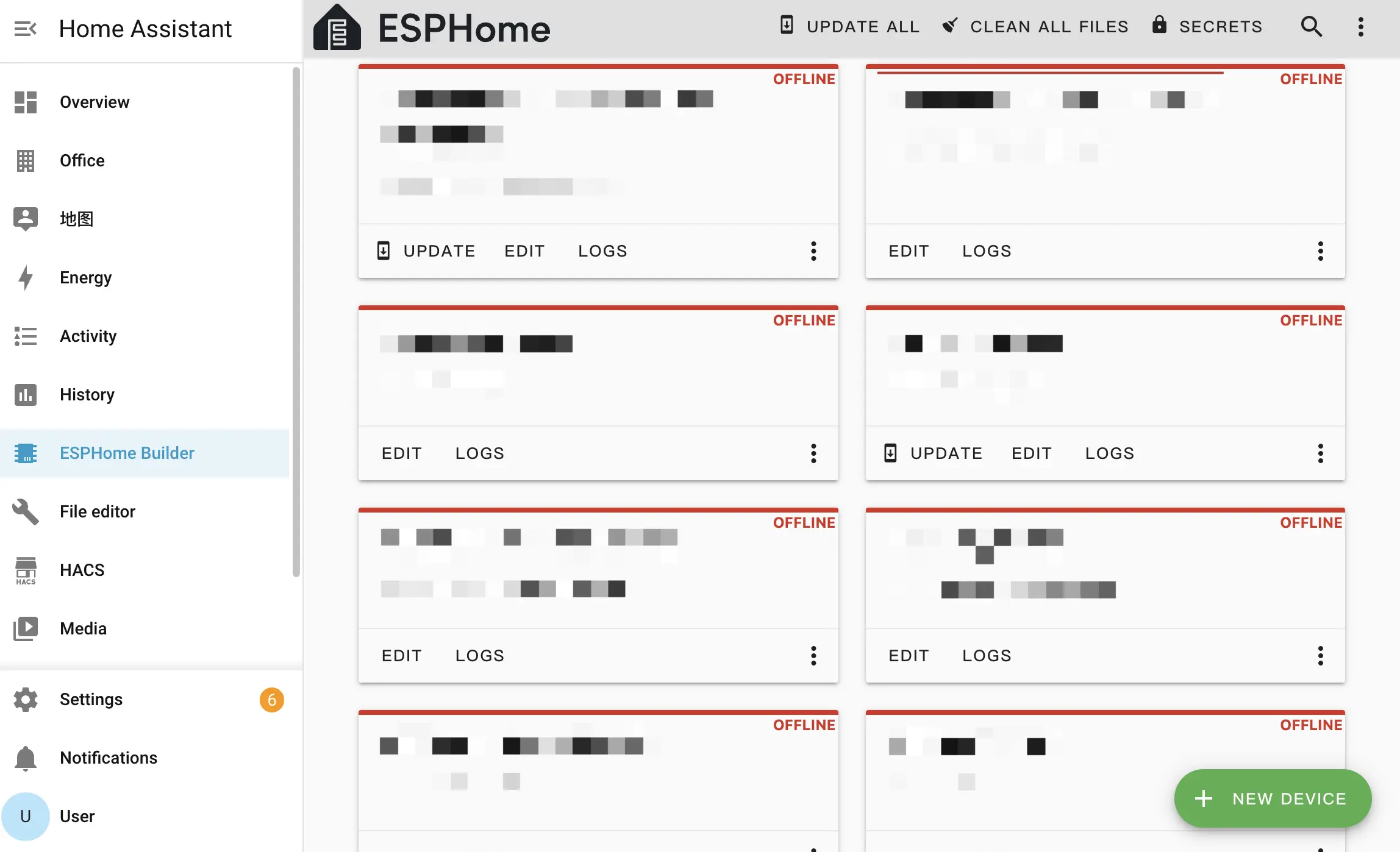
- Open ESPHome Builder in Home Assistant and create a configuration.
- Click the
NEW DEVICEbutton in the bottom right.
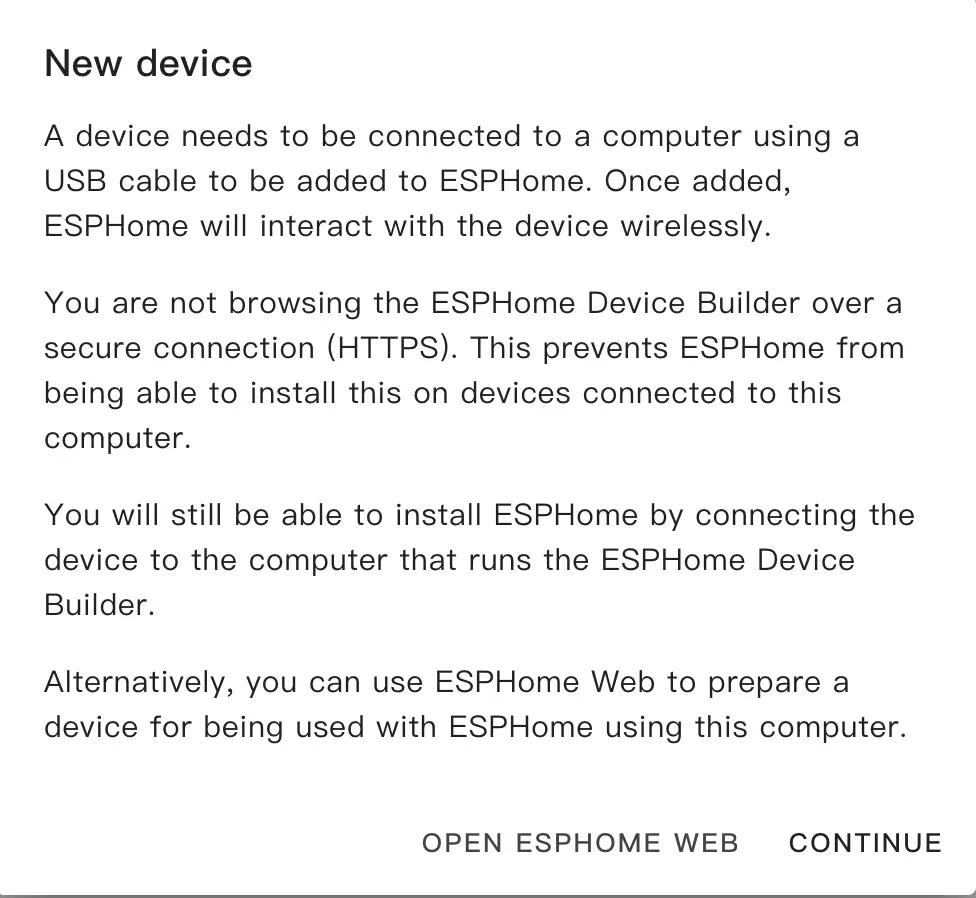
- Click
CONTINUEin the popup.
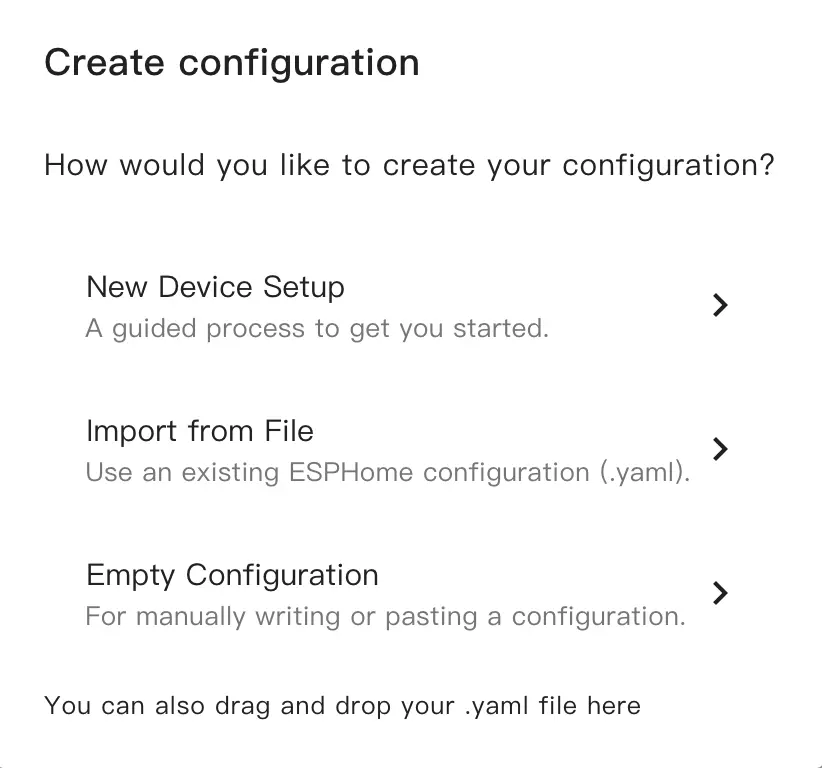
- Select
New Device Setup.
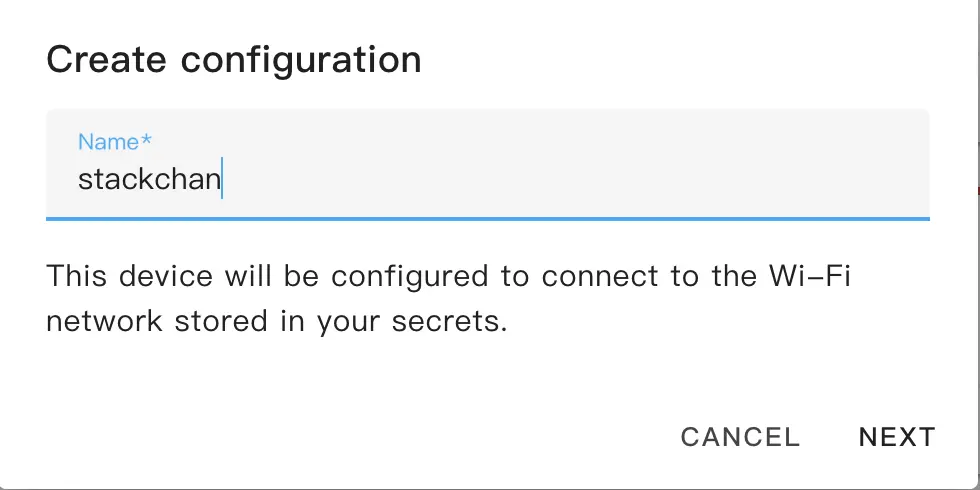
- Enter a name.
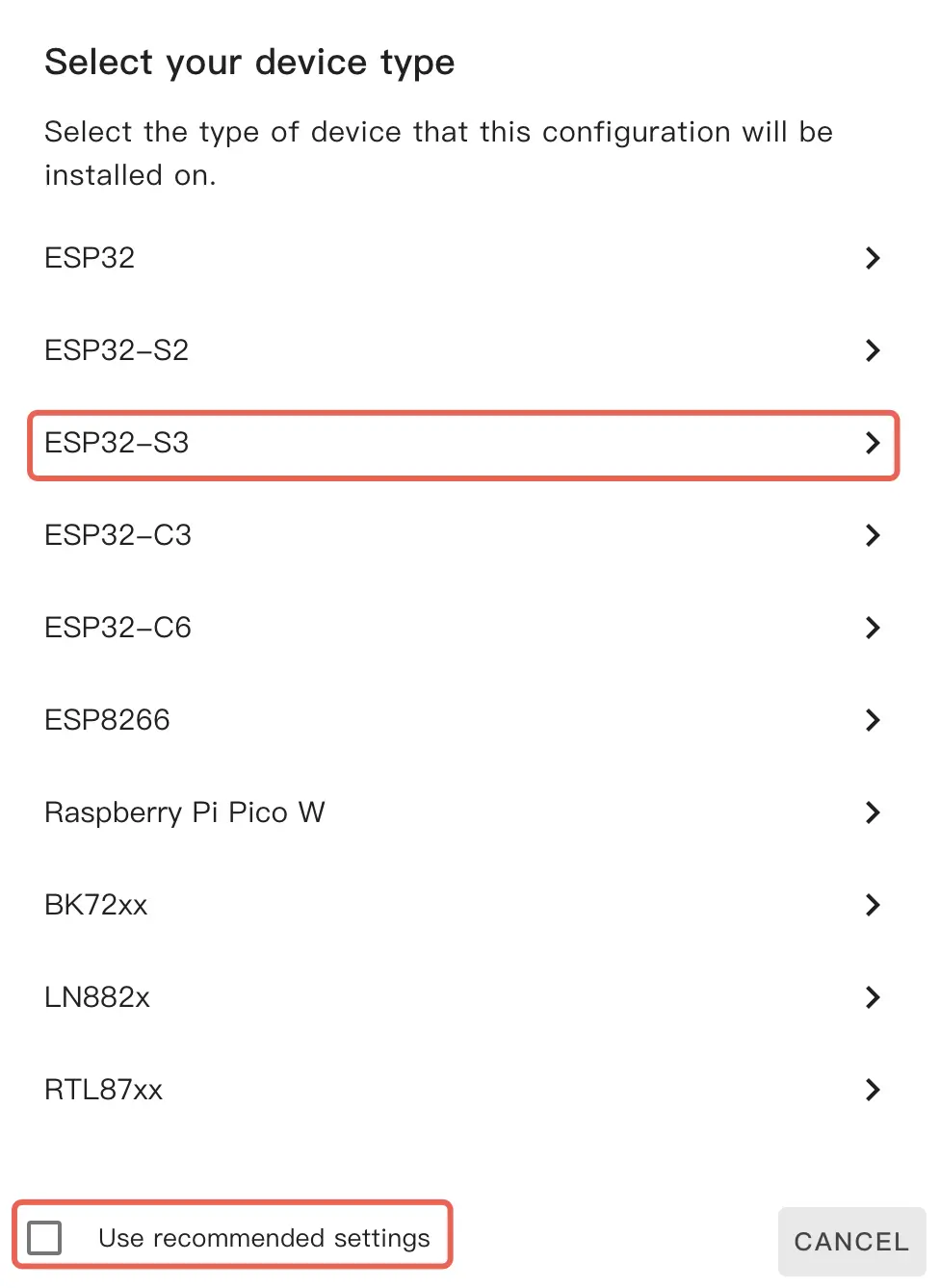
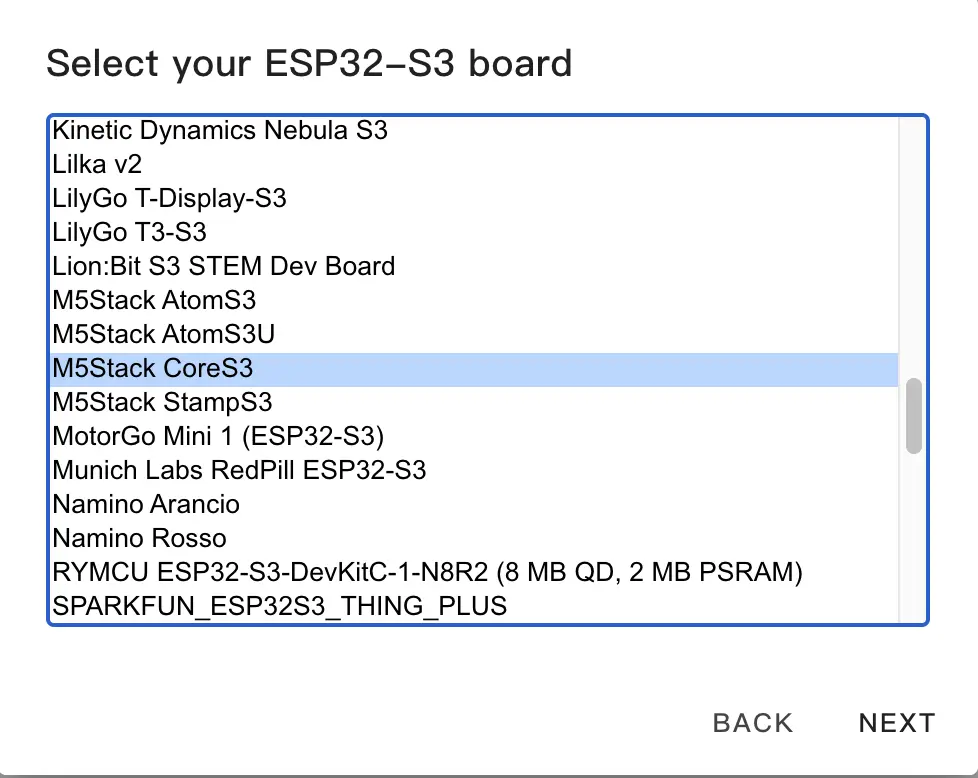
- Select device type. First uncheck
Use recommended settings, then clickESP32-S3and chooseM5Stack CoreS3from the list.
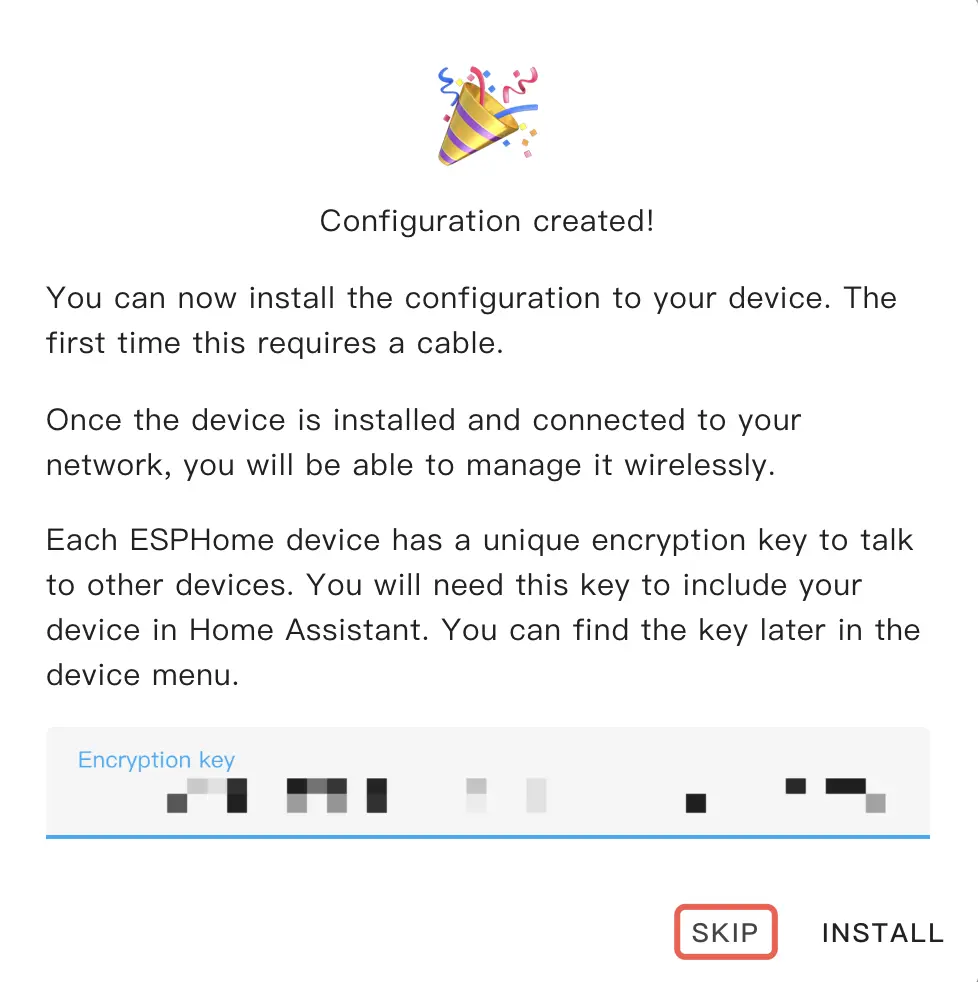
- Copy the API backup, then click
SKIP.
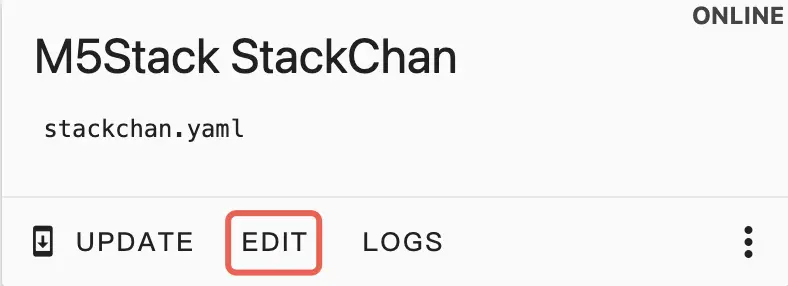
- Click
EDITon the newly generated configuration card.
- Add the package section at the end of the file.
packages:
remote_package_files:
url: https://github.com/m5stack/esphome-yaml
files: [examples/kit/stackchan-bsp.factory.yaml]
ref: main
refresh: 0s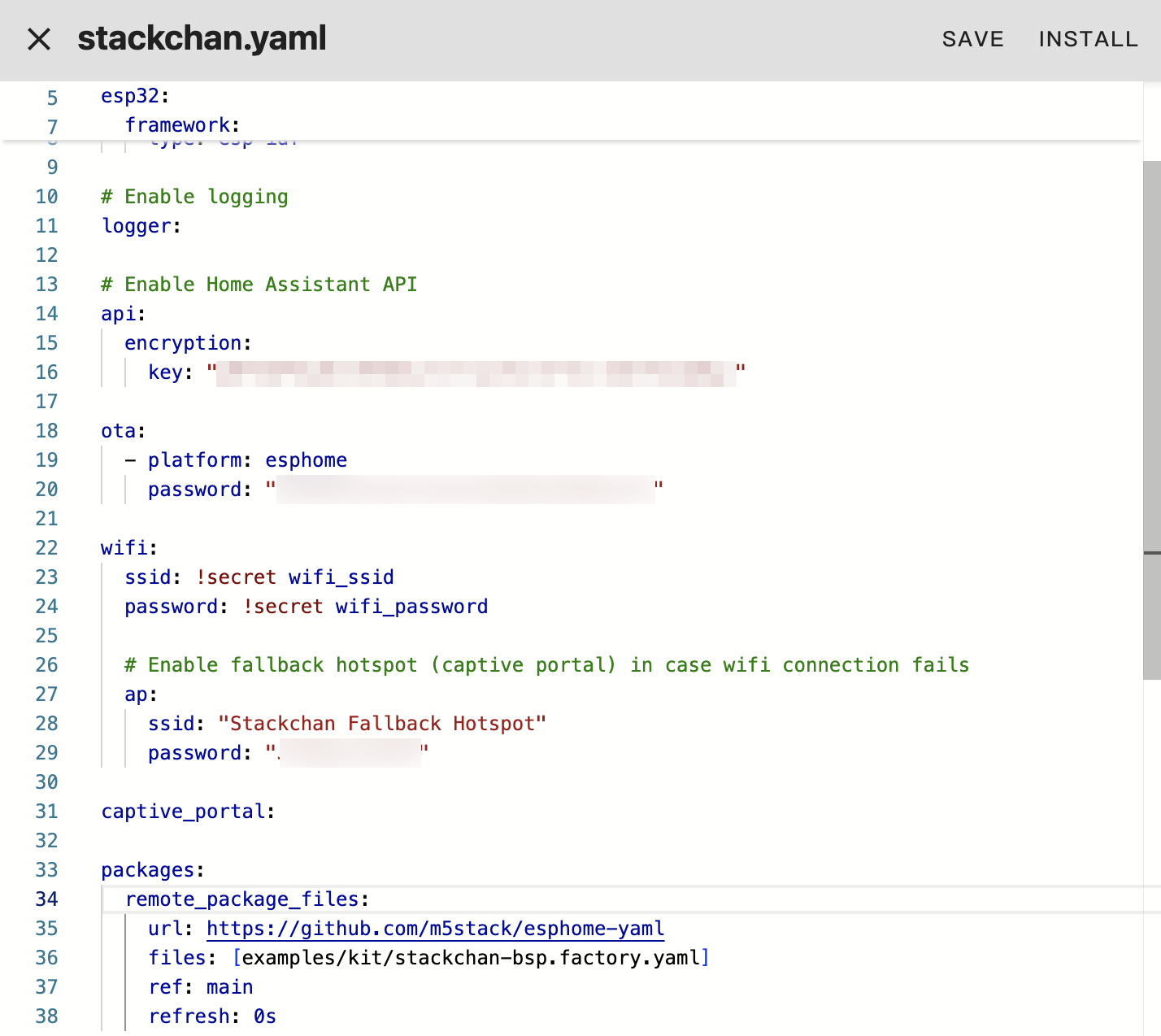
- Save the file and compile.
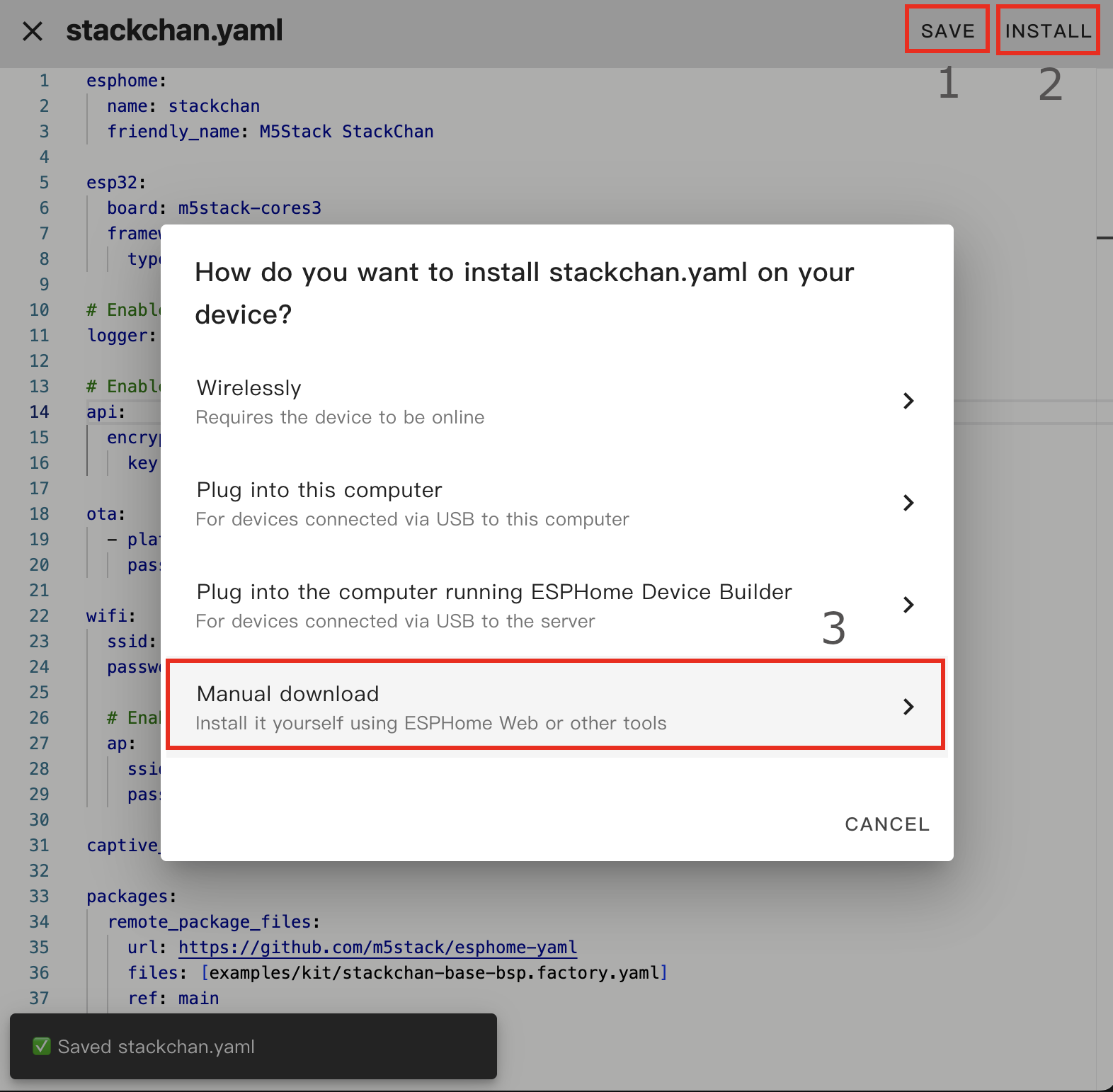
- Click
SAVEand thenINSTALLin the top right, chooseManual Downloadwhen prompted.
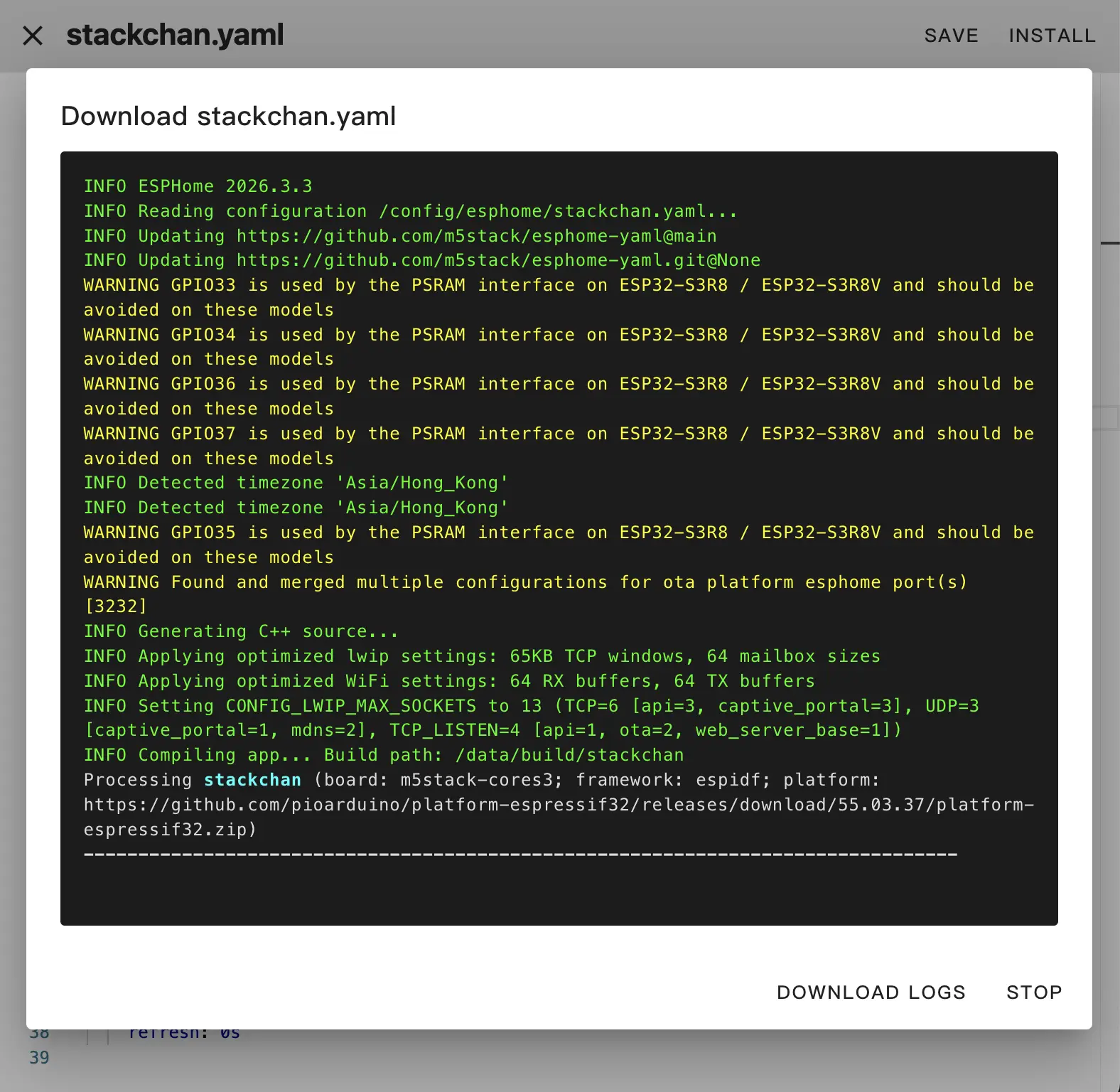
Download and Flash the Firmware
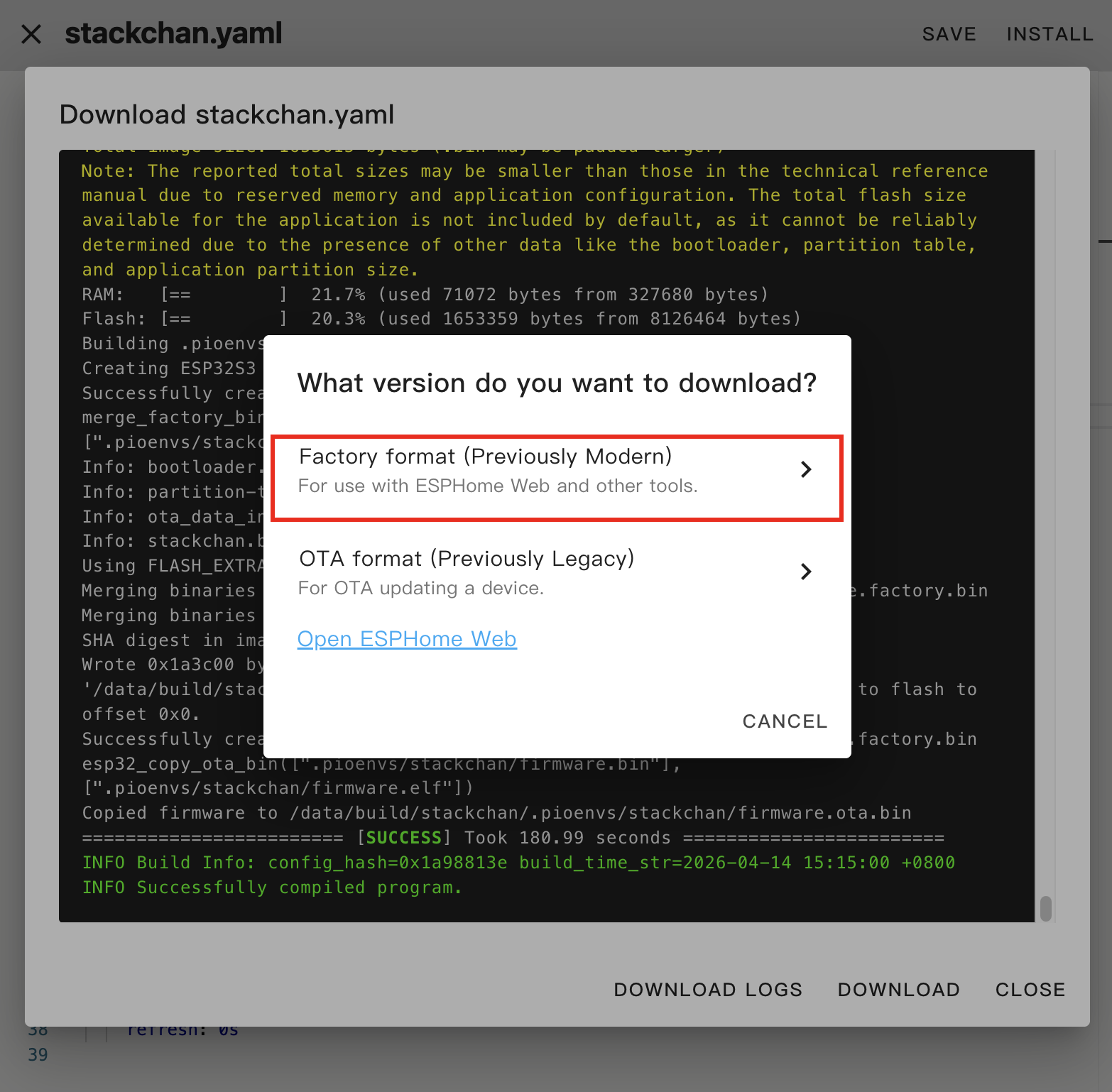
- After compilation completes, choose
Factory Formatand download the firmware.
- Flash the firmware using the web tool:
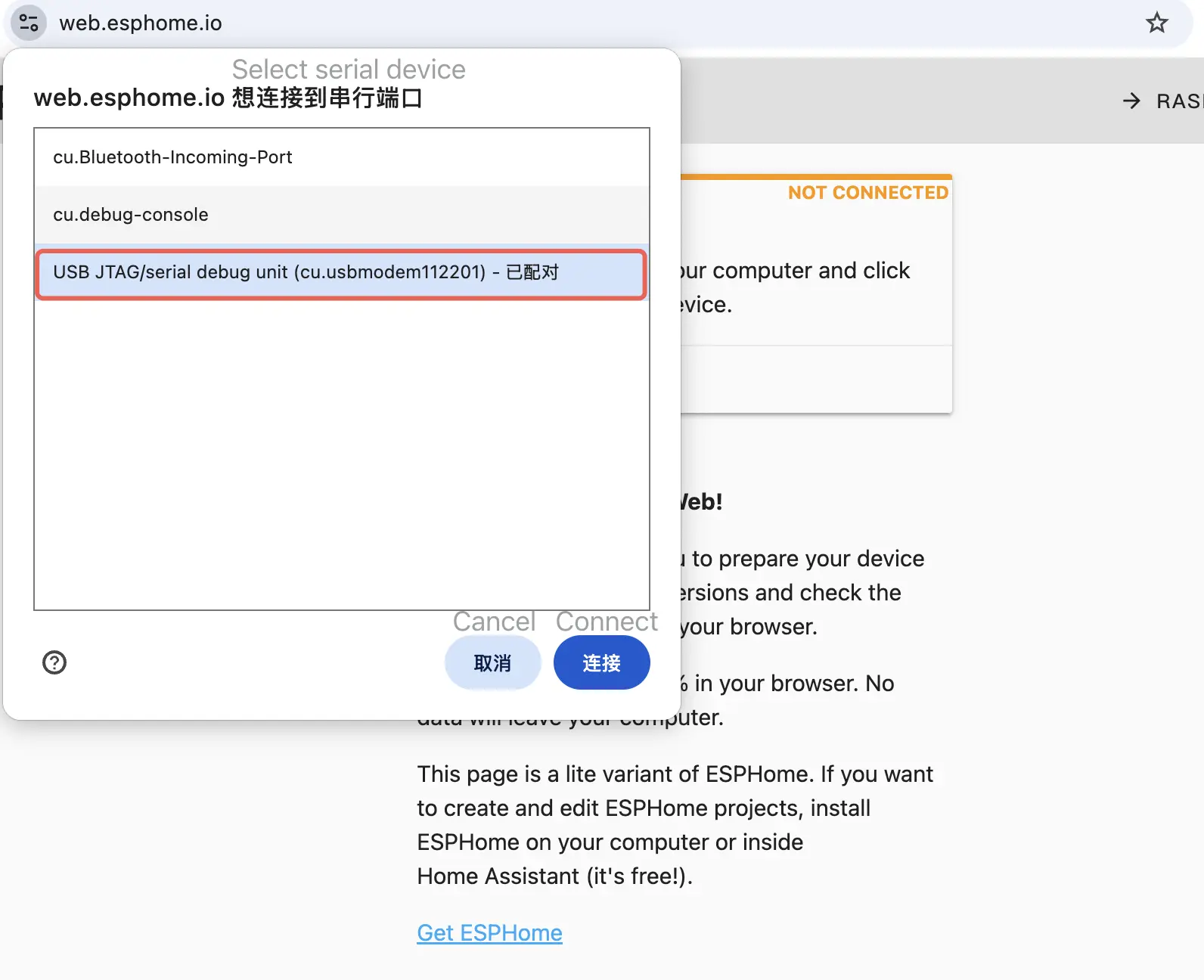
Connect StackChan to the computer via USB-C, hold the reset button until the green LED lights up, then release it to enter download mode.
Open ESPHome Web in the browser and click
CONNECTto connect the device.
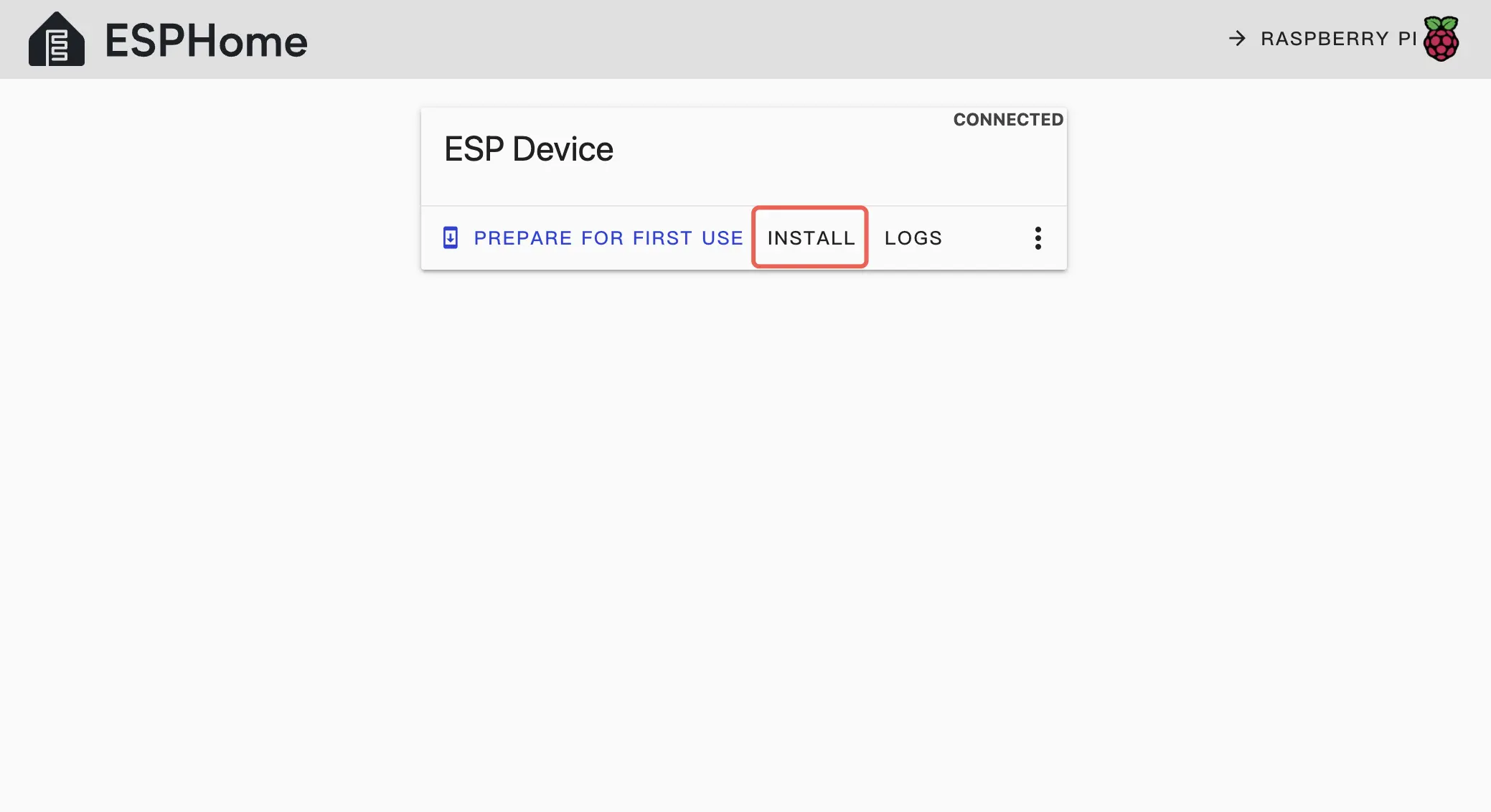
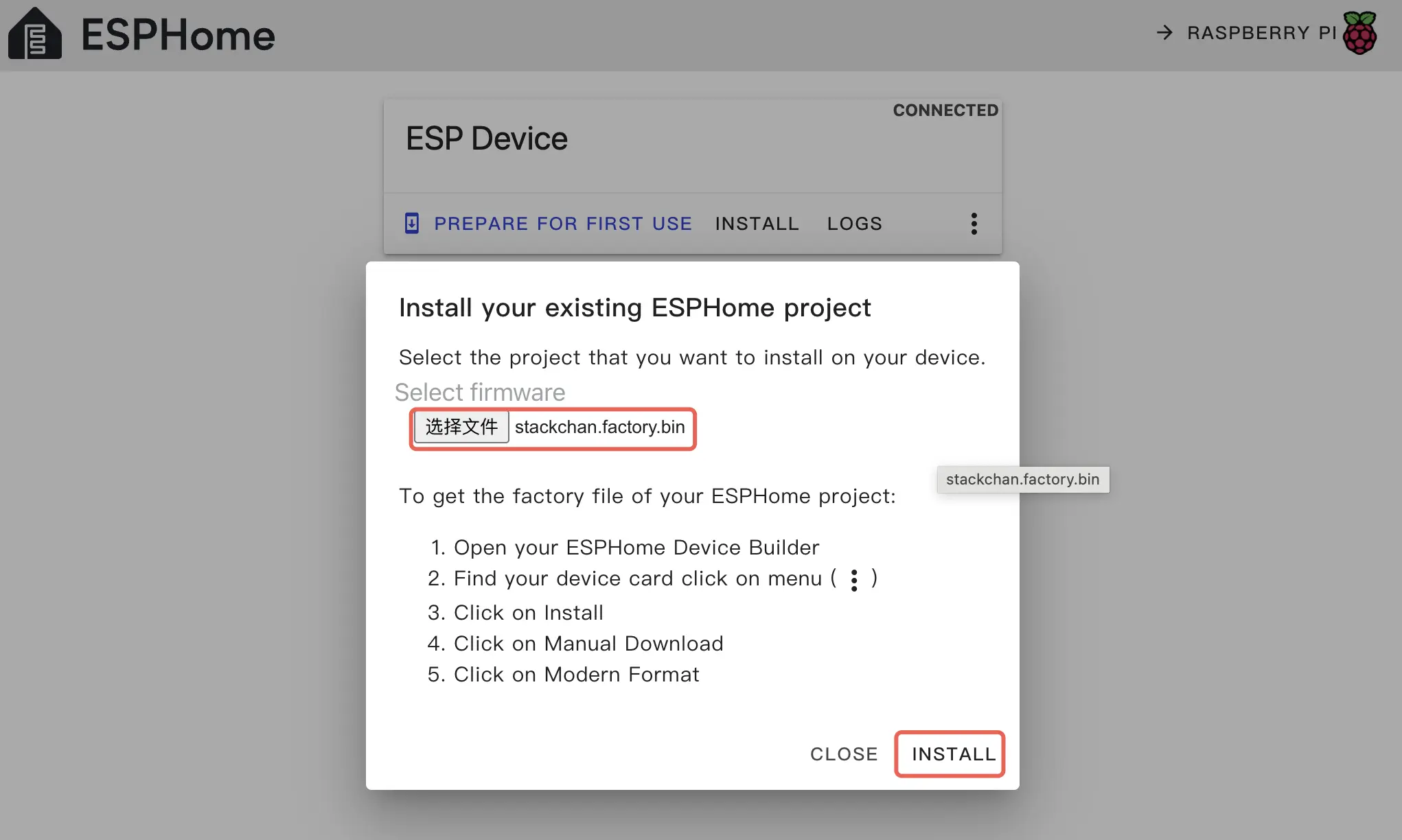
- Click
INSTALL, select the downloaded firmware, and clickINSTALLagain to flash it.
- Click
INSTALLagain to write the firmware to the device.
Wait for the flash to complete.
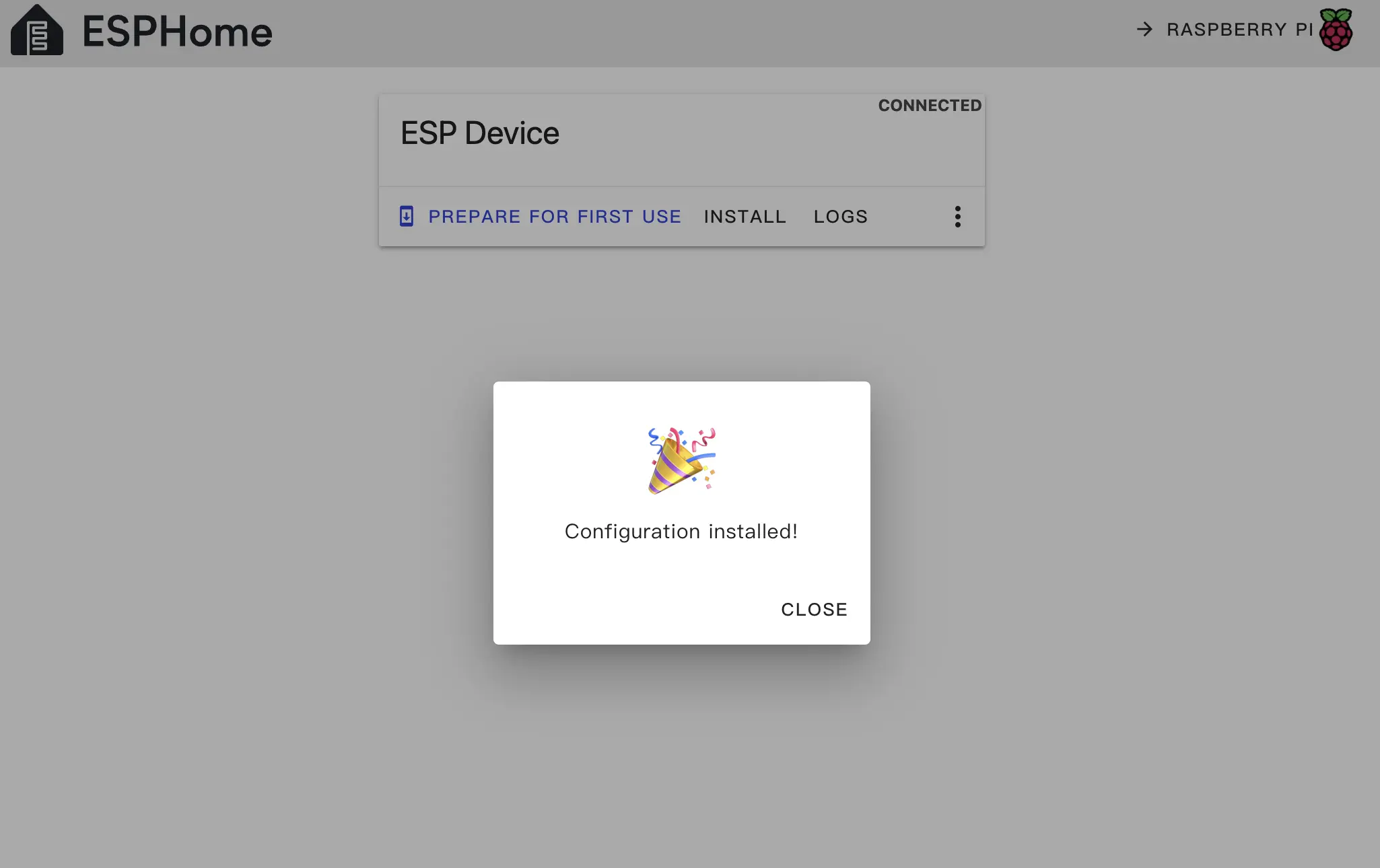
- After flashing, press the RESET button on StackChan to reboot.
Getting Started
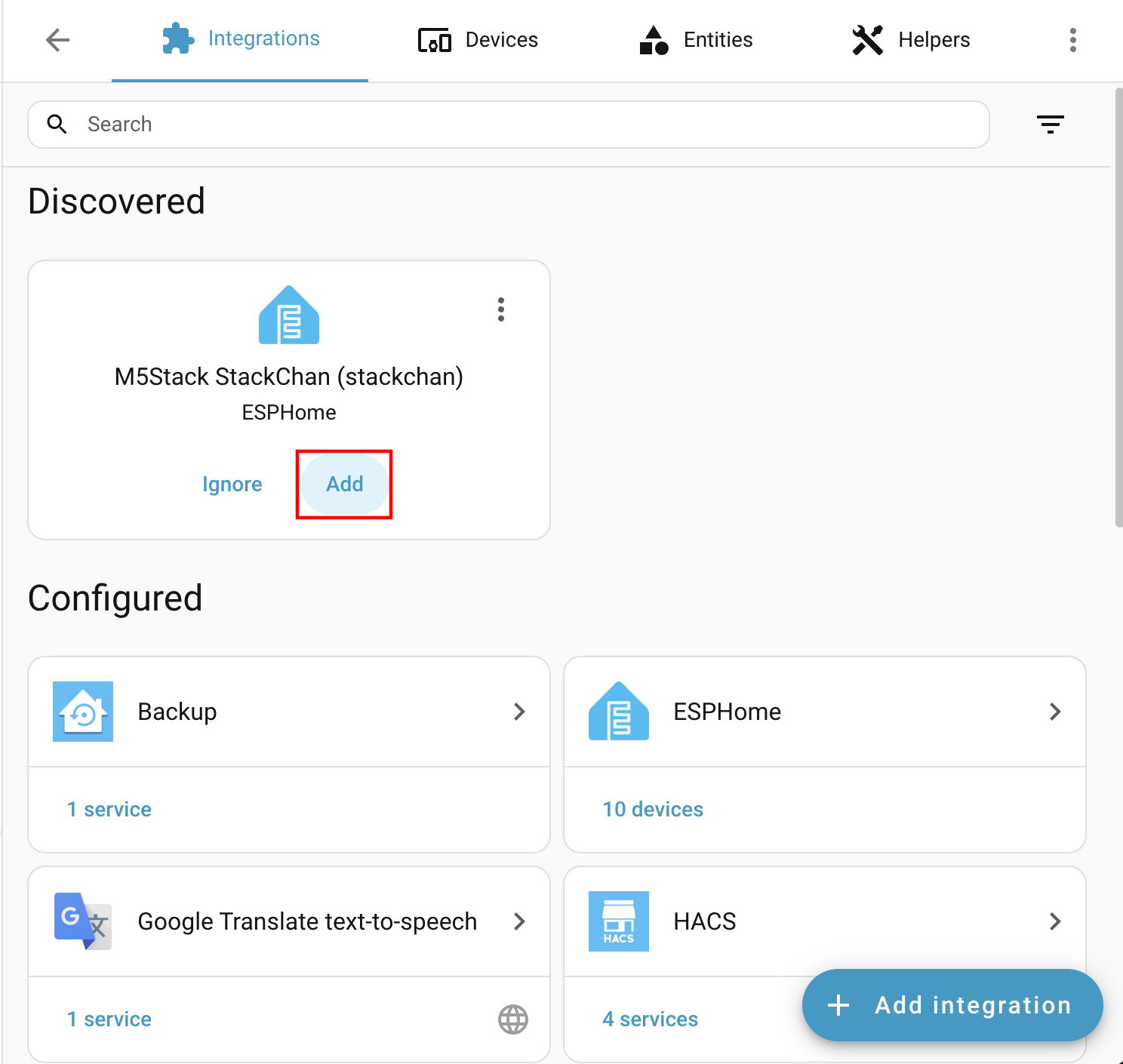
After flashing and rebooting, the device will automatically connect to Wi-Fi. Home Assistant on the same LAN should prompt a new device discovery. Check
Settings -> Devices & services.When the device is found:
- Click
Addon the discovery page.
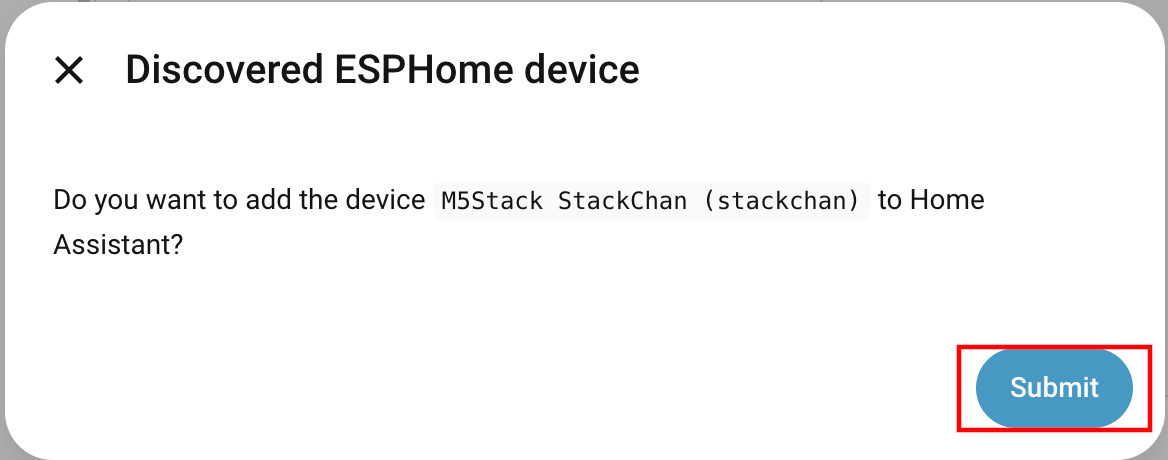
- Confirm the dialog by selecting
Submit.
- If you used an API key for encryption, enter it during validation; otherwise continue with the normal setup.
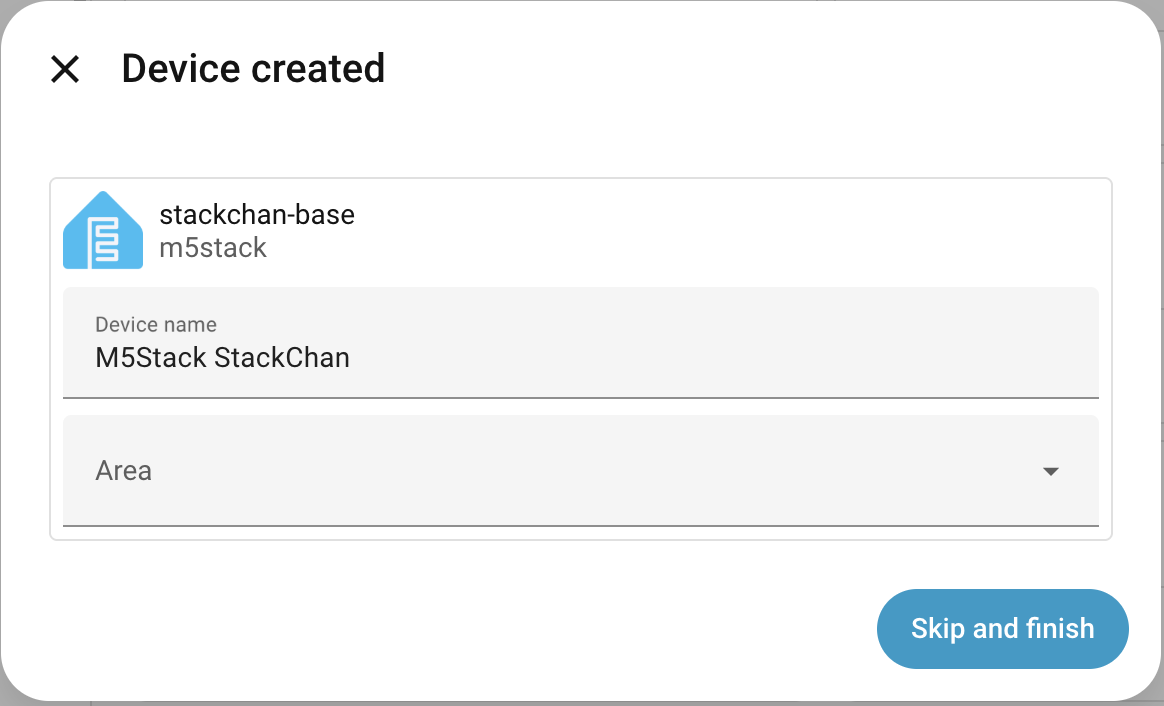
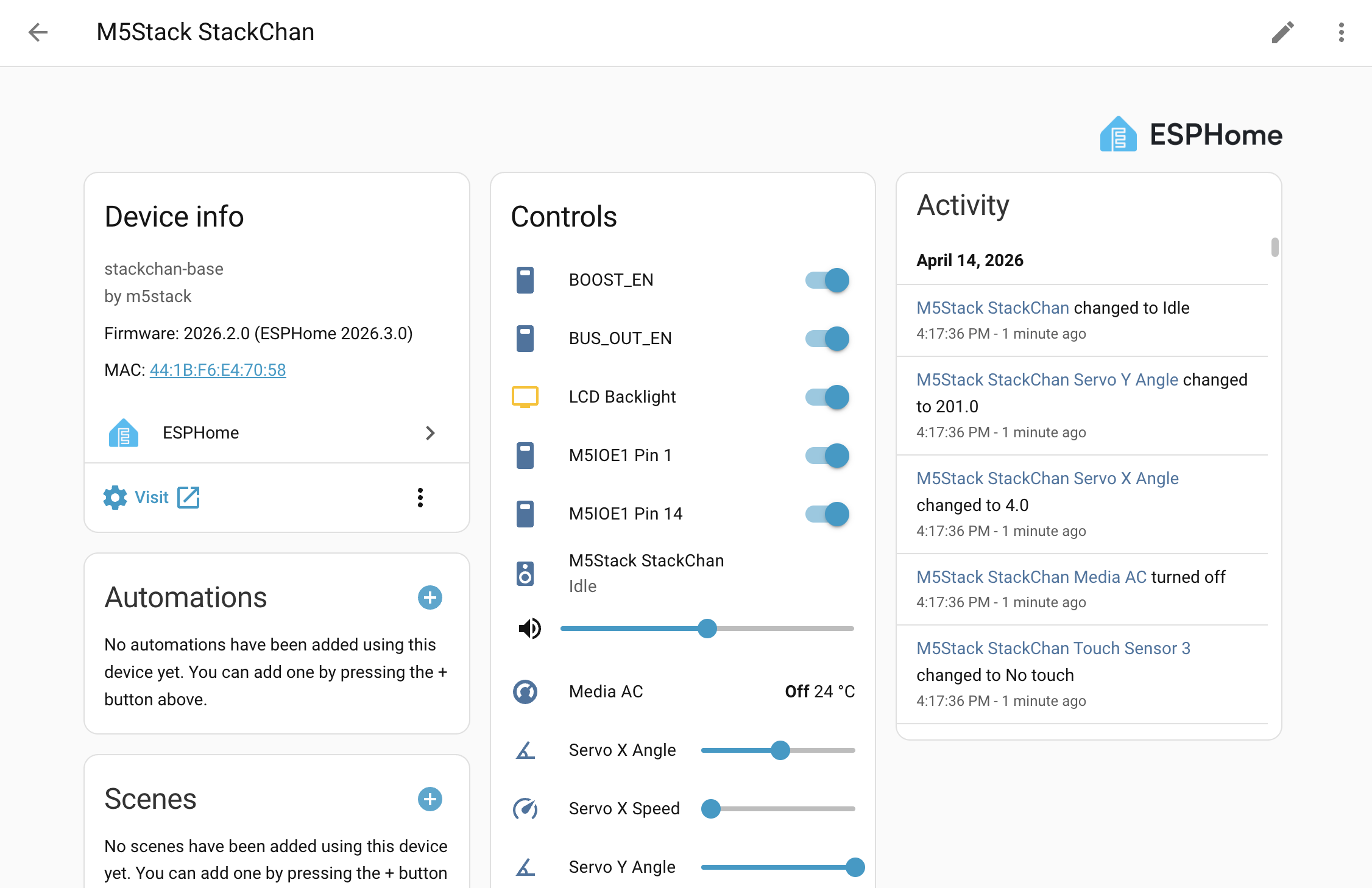
After adding, the device will appear under the ESPHome integration along with its entities and dashboard.
Peripheral Overview
This section describes the various StackChan components, mainly separated into CoreS3 host, Power Board, and Touch Board IC devices.
Main pin configuration:
i2s_audio:
id: i2s_audio_bus
i2s_lrclk_pin: GPIO33
i2s_bclk_pin: GPIO34
i2s_mclk_pin:
number: GPIO0
ignore_strapping_warning: true
i2c:
- id: bsp_bus
sda: GPIO12
scl: GPIO11
frequency: 100kHz
scan: true
spi:
- id: spi_bus
clk_pin: GPIO36
mosi_pin: GPIO37
uart:
tx_pin: GPIO6
rx_pin: GPIO7
baud_rate: 1000000PMIC AXP2101
This component requires I2C and uses the output component to configure LDOs:
axp2101:
id: axp2101_pmu
i2c_id: bsp_bus
output:
- platform: axp2101
type: range
channel: DLDO1
id: lcd_backlight_output
min_voltage: 2600
max_voltage: 3300
- platform: axp2101
channel: ALDO1
voltage: 1800
...IO Expander AW9523B
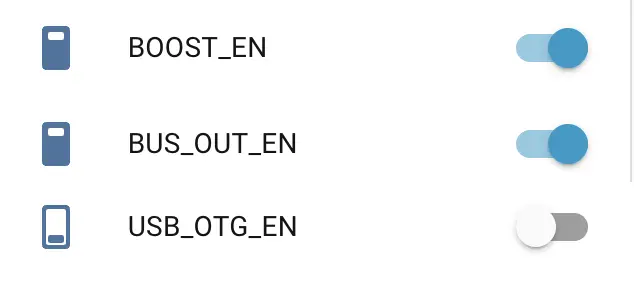
This component requires I2C and supports Pin Schema. It is mainly used for reset/power control. All switches used for reset signals are marked internal: true and are not exposed to the Home Assistant frontend. At the same time, BOOST_EN, BUS_OUT_EN, and USB_OTG_EN control power direction. See the power management example. When using it, enable BOOST_EN first; then BUS_OUT_EN and USB_OTG_EN can take effect.
aw9523b:
id: aw9523b_hub
i2c_id: bsp_bus
p0_drive_mode: PUSH_PULL
switch:
- platform: gpio
name: "AW RST P0_2"
pin:
aw9523b_id: aw9523b_hub
number: 2
internal: true
restore_mode: RESTORE_DEFAULT_ON
...
Audio ADC ES7210
This component requires I2C. If using the voice assistant, sample_rate must be 16000.
audio_adc:
- platform: es7210
id: es7210_adc
i2c_id: bsp_bus
bits_per_sample: 16bit
sample_rate: 16000
mic_gain: 36Microphone
This component requires I2S support. The microphone component can be used with the voice assistant and will not display in the HA frontend.
microphone:
- platform: i2s_audio
id: i2s_mic
i2s_din_pin: GPIO14
adc_type: external
sample_rate: 16000
bits_per_sample: 16bit
i2s_audio_id: i2s_audio_busAudio Amplifier AW88298
audio_dac:
- platform: aw88298
id: aw88298_dac
i2c_id: bsp_bus
sample_rate: 48000Speaker / Media Player
This component requires I2S. The media player can be used in the Home Assistant frontend to play audio.
speaker:
- platform: i2s_audio
i2s_audio_id: i2s_audio_bus
id: i2s_speaker
dac_type: external
i2s_dout_pin: GPIO13
audio_dac: aw88298_dac
media_player:
- platform: speaker
name: None
id: va_media_player
volume_min: 0.5
volume_max: 0.8
announcement_pipeline:
speaker: i2s_speaker
format: FLAC
sample_rate: 48000
num_channels: 1
LCD ILI9342C
This component requires SPI. The maximum data_rate can only be 40MHz. Set invert_colors to true to match the correct RGB colors.
display:
- platform: mipi_spi
model: M5CORE
dc_pin: GPIO35
reset_pin:
aw9523b_id: aw9523b_hub
number: 9
cs_pin:
number: GPIO3
ignore_strapping_warning: true
data_rate: 40MHz
invert_colors: true
id: m5cores3_lcd
show_test_card: true
Camera GC0308
This component requires I2C. Enabling it allows real-time video stream data to appear in the Home Assistant frontend.
esp32_camera:
name: "Camera"
i2c_id: bsp_bus
vsync_pin:
number: GPIO46
ignore_strapping_warning: true
href_pin: GPIO38
external_clock:
pin: GPIO2
frequency: 20MHz
pixel_clock_pin:
number: GPIO45
ignore_strapping_warning: true
data_pins: [GPIO39, GPIO40, GPIO41, GPIO42, GPIO15, GPIO16, GPIO48, GPIO47] # D0-D7
max_framerate: 15.0 fps
resolution: 320x240
frame_buffer_count: 1
pixel_format: RGB565
jpeg_quality: 6
agc_mode: manual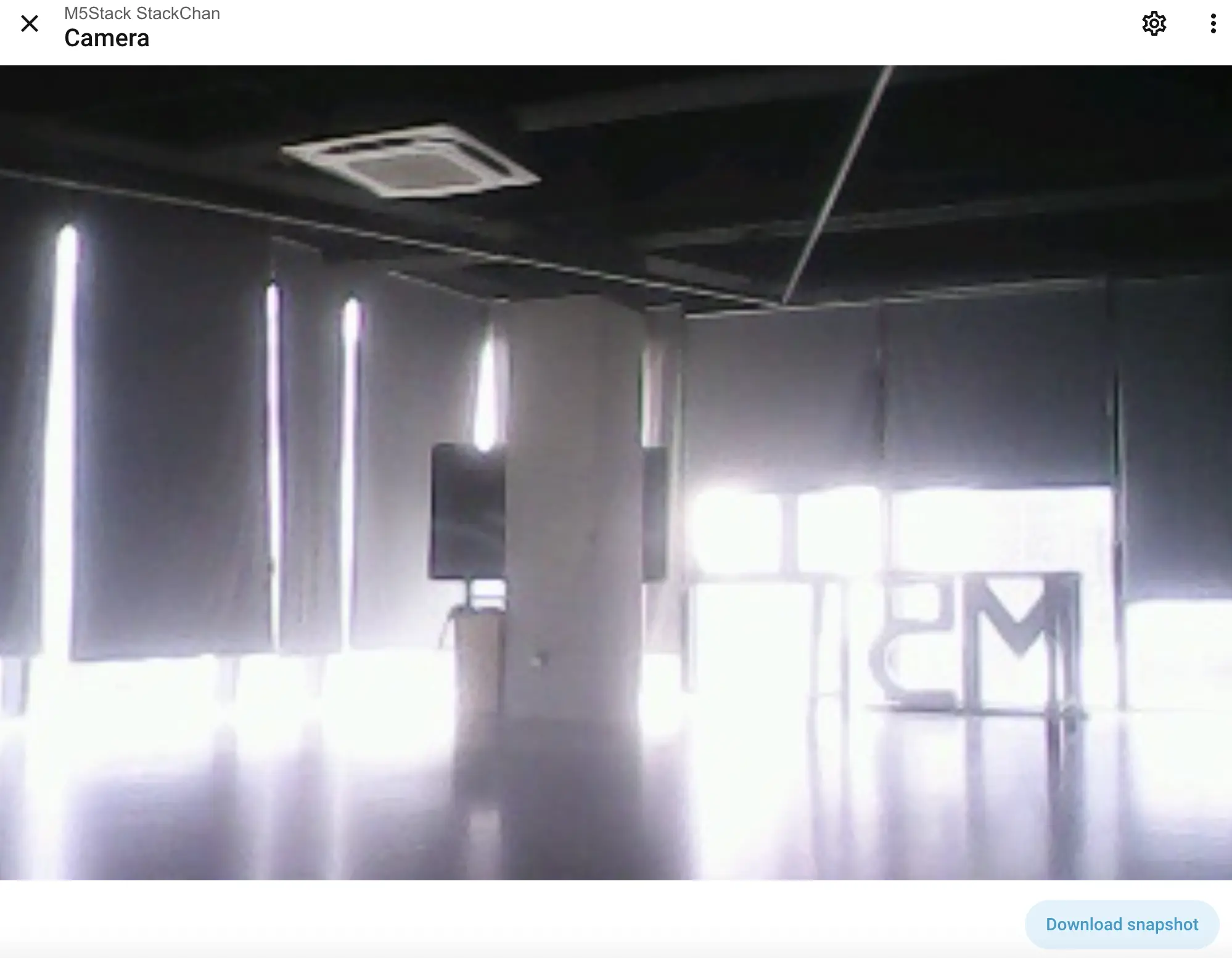
RTC BM8563
This component requires I2C. It can synchronize time with the internet or Home Assistant host:
esphome:
...
on_boot:
then:
# read the RTC time once when the system boots
bm8563.read_time:
time:
- platform: bm8563
i2c_id: bsp_bus
# repeated synchronization is not necessary unless the external RTC
# is much more accurate than the internal clock
update_interval: never
- platform: homeassistant
# instead try to synchronize via network repeatedly ...
on_time_sync:
then:
# ... and update the RTC when the synchronization was successful
bm8563.write_time:
The above data is only visible in serial logs.
Proximity Sensor LTR-553ALS-WA
This component requires I2C and can provide ambient light/proximity data:
sensor:
- platform: ltr_als_ps
address: 0x23
i2c_id: bsp_bus
update_interval: 10s
type: ALS_PS
ambient_light:
name: "Ambient light"
glass_attenuation_factor: 2.5
auto_mode: true
ps_cooldown: 5 s
ps_high_threshold: 500
# on_ps_high_threshold:
# then:
# - .... # do something - light up the screen for example
ps_counts: "Proximity counts"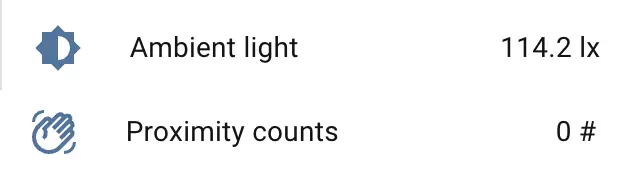
BMI270 6-axis Motion Sensor (WIP)
BMM150 3-axis Magnetometer (WIP)
M5IOE1 Multi-function IO Expander
This component requires I2C.
m5ioe1:
id: m5ioe1_hub
i2c_id: bsp_bus
reset: true
switch:
- platform: gpio
name: "M5IOE1 Pin 1"
pin:
m5ioe1_id: m5ioe1_hub
number: 0
mode:
output: true
pullup: true
restore_mode: RESTORE_DEFAULT_ON
...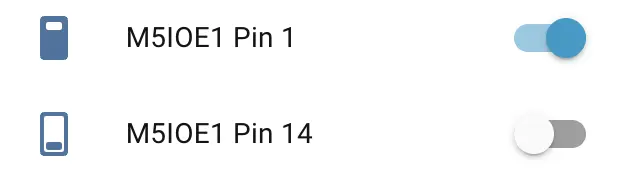
The M5IOE1 Pin 1 switch is used to power the servos. The M5IOE1 Pin 14 switch is enabled by default for NeoPixel-addressable LED strip control. No manual switching is required; the light component controls it automatically.
Power Monitor INA266
This component requires I2C and provides power monitoring (voltage/current). Note: AXP2101 can also monitor battery voltage.
sensor:
- platform: ina226
i2c_id: bsp_bus
address: 0x41
shunt_resistance: 0.01 ohm
max_current: 3.2A
# adc time used for both, Bus Voltage and Shunt Voltage
adc_time: 140us
adc_averaging: 128
update_interval: 60s
current:
name: "INA226 Current"
power:
name: "INA226 Power"
bus_voltage:
name: "INA226 Bus Voltage"
shunt_voltage:
name: "INA226 Shunt Voltage"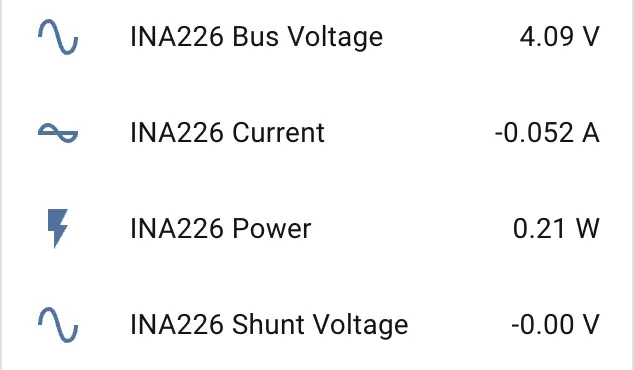
Servos
This component requires UART and provides left-right and up-down head movement for StackChan.
ftservo:
- platform: scs9009
address: 1
id: x_servo
- platform: scs9009
address: 2
id: y_servo
number:
- platform: ftservo
ftservo_id: x_servo
angle:
id: servo_x_angle
name: "Servo X Angle"
min_value: -164
max_value: 164
use_raw_angle: false
angle_offset: 164
step: 5
speed:
id: servo_x_speed
name: "Servo X Speed"
min_value: 100
max_value: 1500
step: 100
- platform: ftservo
ftservo_id: y_servo
angle:
id: servo_y_angle
name: "Servo Y Angle"
min_value: 0
max_value: 90
use_raw_angle: false
angle_offset: 239
step: 5
speed:
id: servo_y_speed
name: "Servo Y Speed"
min_value: 100
max_value: 1500
step: 100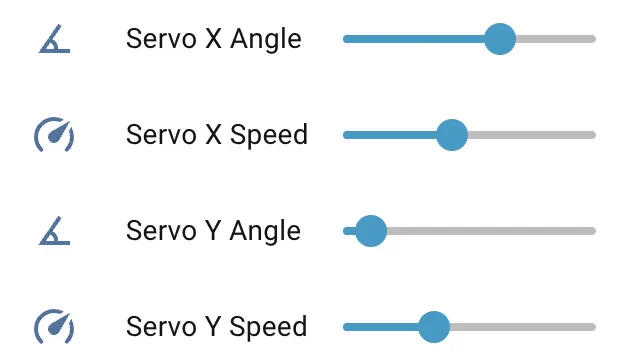
These angles are adjusted to fit StackChan's motion range. X motion is set from -165° to 165°, and Y motion is set from 0° to 90°. Zero refers to 0°.
For default step control, enable:
number:
- platform: ftservo
ftservo_id: x_servo
position:
id: servo_position
name: "Servo X Position"
min_value: 0
max_value: 1024The default step range is 0 to 1024. Adjusting the speed slider controls the servo speed in steps/s.
Servo Calibration
There are two template buttons available in the example YAML configrations:
button:
- platform: template
name: "Servo Calibration"
on_press:
- lambda: |-
ESP_LOGD("ftservo", "Start calibration");
float x_zero = id(servo_x_position).state;
float y_zero = id(servo_y_position).state;
// assign offset
float x_offset = x_zero / 2.844f;
float y_offset = y_zero / 2.844f;
// override default offset setting
id(servo_x_angle)->set_angle_offset(static_cast<int>(x_offset));
id(servo_y_angle)->set_angle_offset(static_cast<int>(y_offset));
// indicating we are using calibration value
id(use_calib_value) = true;
id(x_servo_zero_step) = static_cast<int>(x_zero);
id(y_servo_zero_step) = static_cast<int>(y_zero);
- delay: 1s
- lambda: |-
ESP_LOGD("ftservo", "Preferences sync requested");
global_preferences->sync(); // sync at once
ESP_LOGD("ftservo", "Done reading and saving zero position, X zero: %d, Y zero %d",
id(x_servo_zero_step), id(y_servo_zero_step));
- platform: template
name: "Clear Calibration"
on_press:
- lambda: |-
ESP_LOGD("ftservo", "Restore to default settings");
id(use_calib_value) = false;
id(x_servo_zero_step) = ${servo_x_angle_offset};
id(y_servo_zero_step) = ${servo_y_angle_offset};
- delay: 1s
- lambda: |-
ESP_LOGD("ftservo", "Preferences sync requested");
global_preferences->sync(); // sync at once
ESP_LOGD("ftservo", "Done clear calibration");
And serveral components rely on the calibration data:
esphome:
...
# Servo calibration data
- priority: -100
then:
- lambda: |-
if (id(use_calib_value)) {
ESP_LOGD("boot", "Restoring calibration: X=%d, Y=%d",
id(x_servo_zero_step),
id(y_servo_zero_step));
float x_offset = id(x_servo_zero_step) / 2.844f;
float y_offset = id(y_servo_zero_step) / 2.844f;
// override default offset setting
id(servo_x_angle)->set_angle_offset(static_cast<int>(x_offset));
id(servo_y_angle)->set_angle_offset(static_cast<int>(y_offset));
} else {
ESP_LOGD("boot", "No calibration data, using defaults.");
}
- platform: ftservo
id: x_servo_sensor
ftservo_id: x_servo
position:
id: servo_x_position
name: "Servo X Position"
filters:
- delta: 3.0
on_value:
- lambda: |-
if ( !id(use_calib_value) ) {
float val = ${servo_x_position_to_angle};
id(servo_x_angle).publish_state(roundf(val));
} else {
float x = id(servo_x_position).state;
float zero = static_cast<float>(id(x_servo_zero_step));
float val = (x - zero) * 0.3710f;
id(servo_x_angle).publish_state(roundf(val));
}
- platform: ftservo
id: y_servo_sensor
ftservo_id: y_servo
position:
id: servo_y_position
name: "Servo Y Position"
filters:
- delta: 3.0
on_value:
- lambda: |-
if ( !id(use_calib_value) ) {
float val = ${servo_y_position_to_angle};
id(servo_y_angle).publish_state(roundf(val)); // using angle
} else {
float x = id(servo_y_position).state;
float zero = static_cast<float>(id(y_servo_zero_step));
float val = (x - zero) * 90.0f / 260.0f;
id(servo_y_angle).publish_state(roundf(val));
}Connect the StackChan to Home Assistant, calibration steps:
- Move the StackChan to zero position:

Press the
Servo CalibrationbuttonWait for a second for zero position to store into the NVS of ESP32. (If you monitor the serial log, there are logs suggest the NVS writing operation as shown below)

- Try resetting the device, move the number slider slowly to check the calibration results.

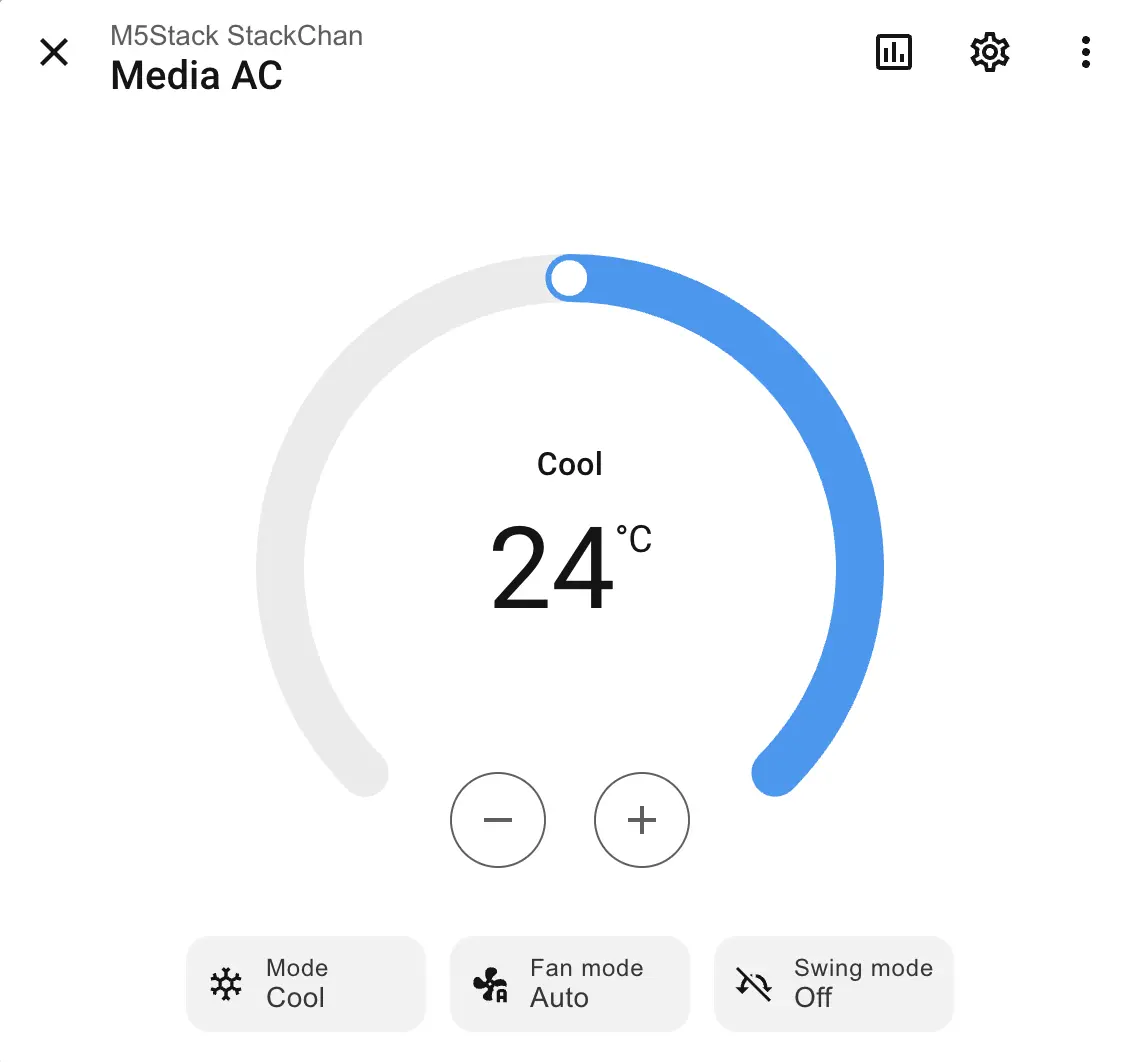
Infrared Transmitter
remote_transmitter:
pin: GPIO5
carrier_duty_percent: 50%
non_blocking: trueThe infrared component can be used to create IR environment control devices such as air conditioners. For example:
climate:
- platform: coolix
name: "Media AC"
visual:
min_temperature: 18
max_temperature: 30
temperature_step: 1
Capacitive Touch Sensor Si12T
This component requires I2C and can provide touch results when touching StackChan's head using text_sensor.
si12t:
id: touch_hub
i2c_id: bsp_bus
text_sensor:
- platform: si12t
name: "Touch Sensor 1"
channel: CH_1
update_interval: 1s
- platform: si12t
name: "Touch Sensor 2"
channel: CH_2
update_interval: 1s
- platform: si12t
name: "Touch Sensor 3"
channel: CH_3
update_interval: 1s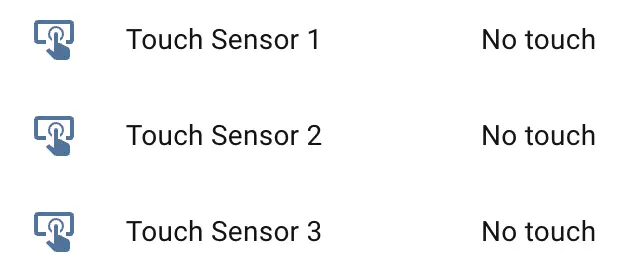
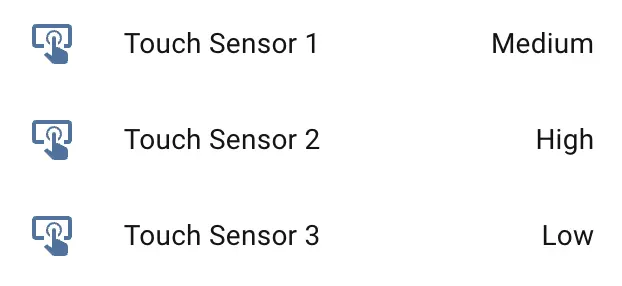
Touch results are reported to frontend sensors as HIGH, MEDIUM, and LOW, corresponding to high, medium, and low intensity. No touch means no touch was detected.
NFC ST25R3916 (WIP)
This feature requires I2C.
RGB Light Bar
This feature depends on the NeoPixel driver on the M5IOE1 board and must be enabled in M5IOE1:
light:
- platform: m5ioe1
id: stackchan_light_bar
name: "StackChan Light Bar"
icon: mdi:led-strip
num_led: 12
effects:
- random:
name: "Random"
transition_length: 1s
update_interval: 1s
- addressable_rainbow:
- addressable_rainbow:
name: Rainbow Effect With Custom Values
speed: 10
width: 50
- addressable_twinkle:
- addressable_twinkle:
name: Twinkle Effect With Custom Values
twinkle_probability: 5%
progress_interval: 4msIt also requires BUS power to supply 5V. Enable BOOST EN and BUS OUT EN switches (these GPIO switches are on the AW9523B IO expander):
switch:
- platform: gpio
name: "BOOST_EN"
pin:
aw9523b_id: aw9523b_hub
number: 15
restore_mode: RESTORE_DEFAULT_ON
- platform: gpio
name: "BUS_OUT_EN"
pin:
aw9523b_id: aw9523b_hub
number: 1
restore_mode: RESTORE_DEFAULT_ON
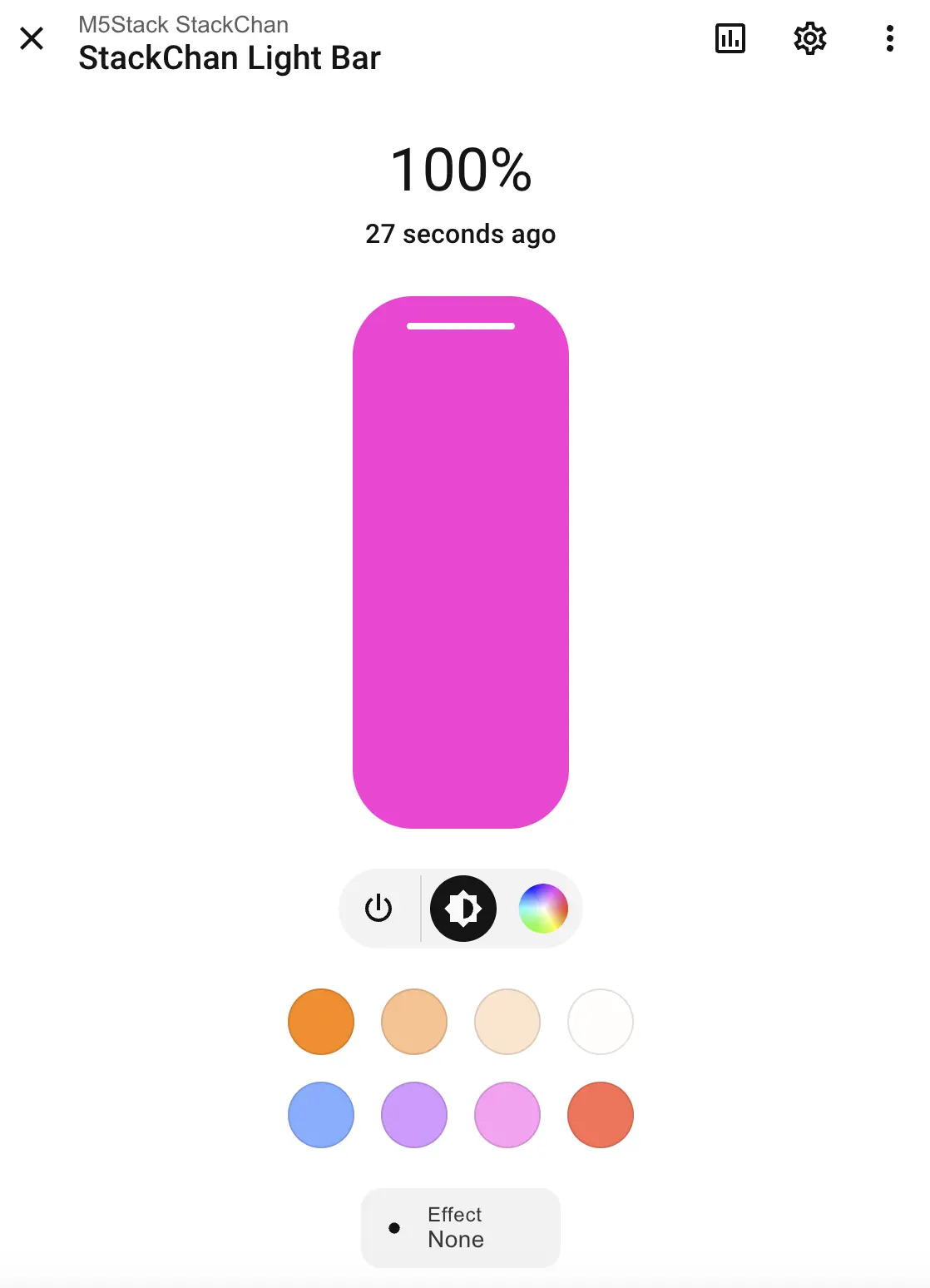
Enable light effects:
Infrared Receiver
remote_receiver:
pin: GPIO10If the controlled device supports feedback, use remote_receiver to receive and process it.