

UiFlow 使用教程
UiFlow1 快速上手
UiFlow1 Blockly
Event
UI
Unit
Module
Hat
UiFlow2 快速上手
2. 固件烧录 & 程序推送 2.0
UiFlow2 视频专栏
Hat BugC2
案例程序
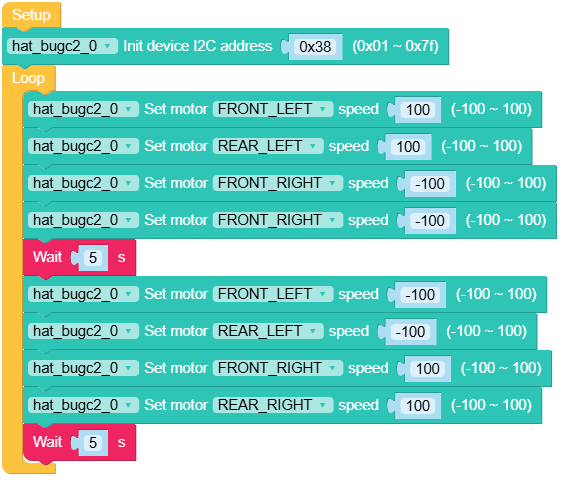
向前和向后交替运动
from m5stack import *
from m5ui import *
from uiflow import *
import time
import hat
setScreenColor(0x111111)
hat_bugc2_0 = hat.get(hat.BUGC2)
hat_bugc2_0.InitDeviceAddr(0x38)
while True:
hat_bugc2_0.SetMotorSpeed(0x00, 100)
hat_bugc2_0.SetMotorSpeed(0x02, 100)
hat_bugc2_0.SetMotorSpeed(0x01, -100)
hat_bugc2_0.SetMotorSpeed(0x01, -100)
wait(5)
hat_bugc2_0.SetMotorSpeed(0x00, -100)
hat_bugc2_0.SetMotorSpeed(0x02, -100)
hat_bugc2_0.SetMotorSpeed(0x01, 100)
hat_bugc2_0.SetMotorSpeed(0x03, 100)
wait(5)
wait_ms(2)功能说明

hat_bugc2_0.InitDeviceAddr(0x38)- 初始化设备的 I2C 地址,设置为 0x38

hat_bugc2_0.GetAdcValue(8)- 获取 8位 ADC 原始值(返回整数)

hat_bugc2_0.GetBatVoltage- 获取电池电压(单位为毫伏,返回整数)

hat_bugc2_0.GetDeviceSpec(0xFE)- 获取设备固件版本的详细信息(返回整数)

hat_bugc2_0.SetRxCb(hat_bugc2_0_rx_cb)- 红外 NEC 接收回调函数,用于处理接收到的数据和地址

hat_bugc2_0.SetI2cAddress(0x38)- 设置前左电机的速度,当前速度值为 50,范围是 -100 到 100

hat_bugc2_0.SetMotorSpeed(0x00, 50)- 设置前左电机的速度,当前速度设置为 50,速度范围是 -100 到 100

hat_bugc2_0.SetRGBColor(0x00, 0xff0000)- 设置轮子 RGB 颜色,当前颜色设置为红色
Page Tools