

UiFlow Tutorial
UiFlow1 Quick Start
2. Firmware & Program 1.0
UiFlow1 Development Guide
Project Management
Use LTE network
UiFlow1 Blockly
Event
UI
Unit
Module
Hat
UiFlow2 Quick Start
2. Firmware & Program 2.0
UiFlow2 Development Guide
UI Editor
Device Security & Sharing
UiFlow2 Video Column
Hat BugC2
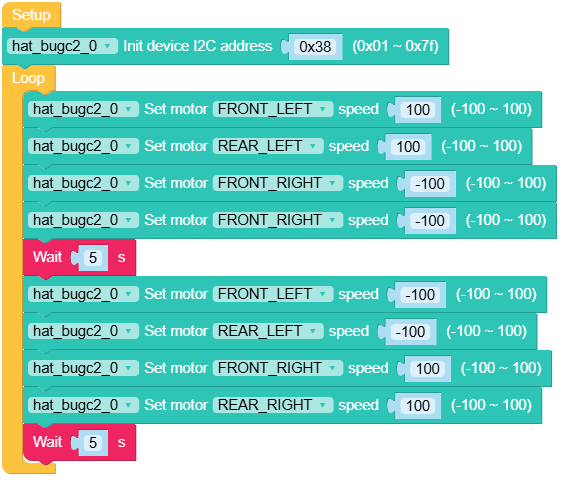
Example
Alternates between moving forward and backward.
from m5stack import *
from m5ui import *
from uiflow import *
import time
import hat
setScreenColor(0x111111)
hat_bugc2_0 = hat.get(hat.BUGC2)
hat_bugc2_0.InitDeviceAddr(0x38)
while True:
hat_bugc2_0.SetMotorSpeed(0x00, 100)
hat_bugc2_0.SetMotorSpeed(0x02, 100)
hat_bugc2_0.SetMotorSpeed(0x01, -100)
hat_bugc2_0.SetMotorSpeed(0x03, -100)
wait(5)
hat_bugc2_0.SetMotorSpeed(0x00, -100)
hat_bugc2_0.SetMotorSpeed(0x02, -100)
hat_bugc2_0.SetMotorSpeed(0x01, 100)
hat_bugc2_0.SetMotorSpeed(0x03, 100)
wait(5)
wait_ms(2)API

hat_bugc2_0.InitDeviceAddr(0x38)- Initialize the device I2C address, set to 0x38.

hat_bugc2_0.GetAdcValue(8)- Get the raw 8-bit ADC value (returns an integer).

hat_bugc2_0.GetBatVoltage- Get the battery voltage in millivolts (returns an integer).

hat_bugc2_0.GetDeviceSpec(0xFE)- Retrieve detailed firmware version information (returns an integer).

hat_bugc2_0.SetRxCb(hat_bugc2_0_rx_cb)- NEC infrared reception callback function, used to process received data and address.

hat_bugc2_0.SetI2cAddress(0x38)- Set the I2C address of the device.

hat_bugc2_0.SetMotorSpeed(0x00, 50)- Set the speed of the front-left motor. The current speed is set to 50, with a range of -100 to 100.

hat_bugc2_0.SetRGBColor(0x00, 0xff0000)- Set the RGB color of the wheel lights, currently set to red.
Page Tools