

Product Guide
Linux PC
CardputerZero
AI アクセラレーターカード
LLM-8850 カード
AI & Agent
リアルタイム音声アシスタント
XiaoZhi ボイスアシスタント
AtomS3R-M12 Volcengine Kit
Industrial Control
IoT Measuring Instruments
Air Quality
PowerHub
Module13.2 PPS
VAMeter
T-Lite
Ethernet Camera
PoECAM
Wi-Fi Camera
Unit CamS3/-5MP
AI Camera
LoRa & LoRaWAN
Motor Control
ファームウェアの初期化
ディップスイッチ&ピン切り替え
Frigate
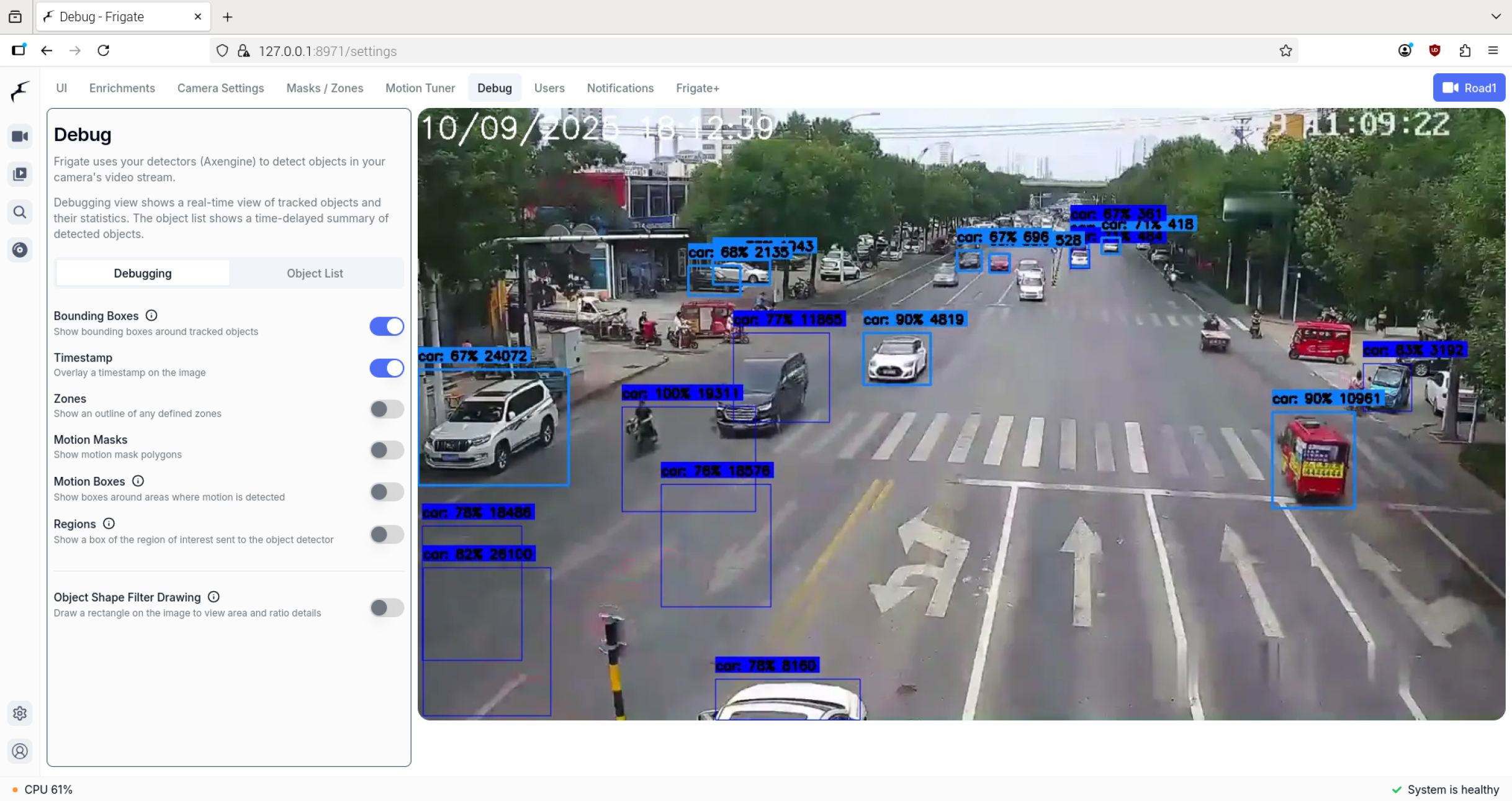
Frigate は、リアルタイム AI 物体検出に基づいて構築されたオープンソースの NVR です。すべての処理はお客様自身のハードウェア上でローカルに実行され、カメラの映像ストリームがご自宅から外に出ることはありません。
- プログラムを手動でダウンロード して raspberrypi5 にアップロードするか、以下のコマンドでモデルリポジトリを取得します。
ヒント
git lfs がインストールされていない場合は、git lfs インストール手順を参照して先にインストールしてください。
git clone -b rpi-axcl https://huggingface.co/AXERA-TECH/frigate-resourceファイル説明:
m5stack@raspberrypi:~/rsp/frigate-resource $ ls -lh
total 2.8G
-rw-rw-r-- 1 m5stack m5stack 48M Oct 9 16:46 axcl_host_aarch64_V3.6.5_20250908154509_NO4973.deb
-rw-rw-r-- 1 m5stack m5stack 648 Oct 9 16:41 docker-compose.yml
-rw-rw-r-- 1 m5stack m5stack 2.8G Oct 9 16:46 frigate-rpi-axcl-f8f387a.tar
-rw-rw-r-- 1 m5stack m5stack 3.7K Oct 9 16:41 README.md- docker イメージをインポートする
ヒント
docker がインストールされていない場合は、RaspberryPi docker インストール手順を参照して先にインストールしてください。
docker load -i frigate-resource/frigate-rpi-axcl-f8f387a.tar # イメージファイルはアップデートされる可能性があるため、実際のファイル名を使用してください。- 作業ディレクトリを準備する
mkdir -p ~/frigate-runtime/{config,storage}
cp frigate-resource/docker-compose.yml ~/frigate-runtime/- コンテナを起動する
cd ~/frigate-runtime/
docker compose up -d- https://server_ip:8971 から Frigate 管理 Web にアクセスする
ヒント
デフォルトのユーザー名 admin デフォルトのパスワード axera123456
- 設定をクリックし、パラメータを構成します。go2rtc 部分を自分の IP カメラのアドレスに変更し、保存して再起動します。
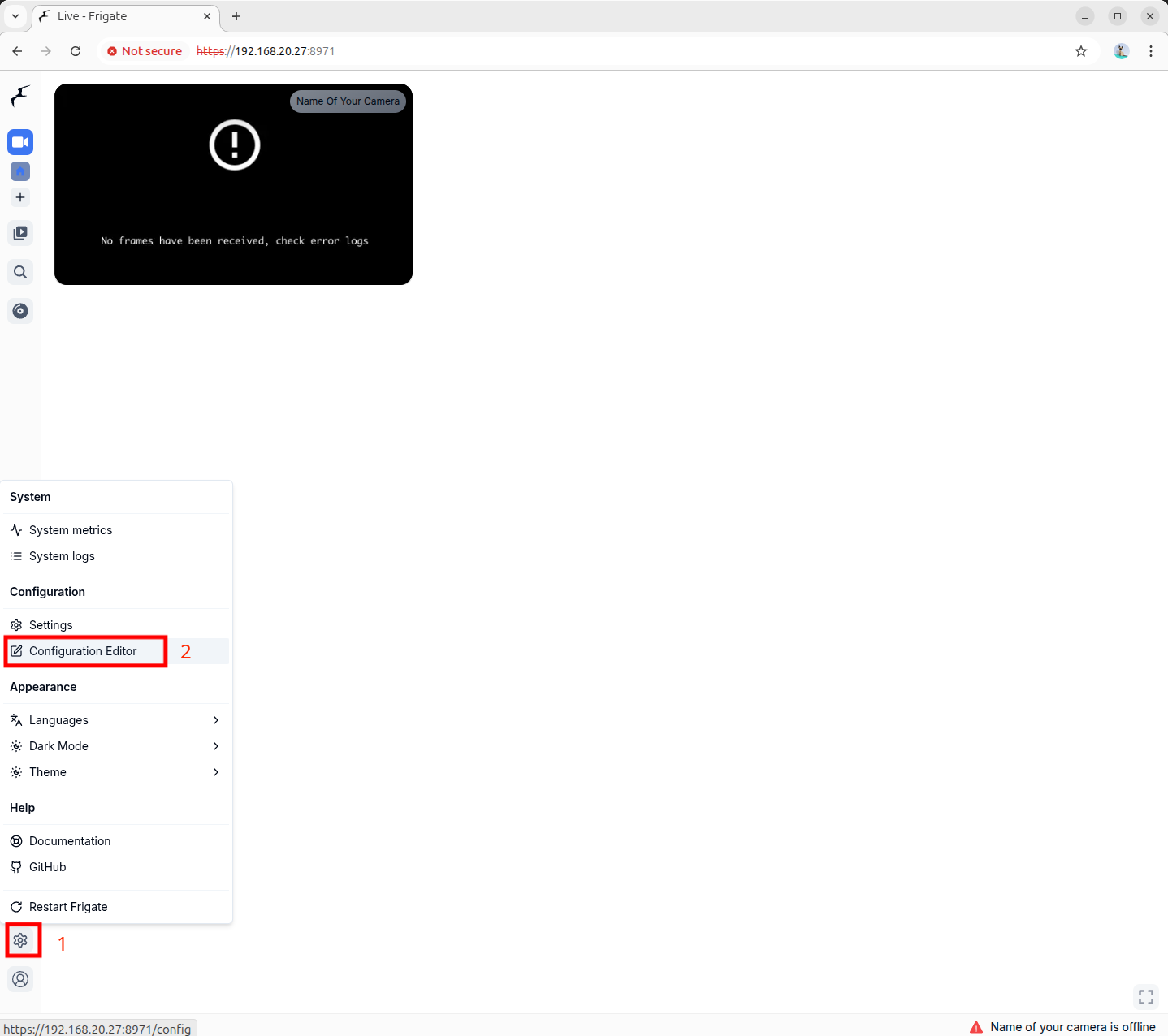
設定例
#ffmpeg グローバル変数、必須
ffmpeg:
global_args: ["-hide_banner", "-loglevel", "warning", "-threads", "1"]
output_args:
detect: ["-threads", "1", "-f", "rawvideo", "-pix_fmt", "yuv420p"]
mqtt:
enabled: false
go2rtc:
streams:
#メインストリーム
road1:
- rtsp://192.168.20.57:8554/road1.264
#サブストリーム
road1_sub:
- rtsp://192.168.20.57:8554/road1_sub.264
cameras:
road1:
enabled: true
ffmpeg:
inputs:
#録画ストリームのパス。ここでは go2rtc で設定したメインストリームを使用
#デバッグ段階ではローカルストリームファイルを使用可能
- path: rtsp://127.0.0.1:8554/road1
roles:
- record
#検出ストリームのパス。ここでは go2rtc で設定したサブストリームを使用
#デバッグ段階ではローカルストリームファイルを使用可能
- path: rtsp://127.0.0.1:8554/road1_sub
roles:
- detect
#preset-rpi-64-h264 は h264 ストリームのデコード用
#preset-rpi-64-h265 は h265 ストリームのデコード用
hwaccel_args: preset-rpi-64-h264
record:
enabled: true
#検出機能を有効化
#検出の幅と高さを設定しない場合はデフォルトで検出ストリームのネイティブ解像度を使用
detect:
enabled: true
width: 1280
height: 720
fps: 5
#検出エンジンに axengine を使用する設定
detectors:
axengine:
type: axengine
#axengine の物体検出モデルを設定
model:
path: yolov5s_320
width: 320
height: 320
input_pixel_format: bgr
labelmap_path: /labelmap/coco-80.txt
#追跡する対象の種類
objects:
track:
- person
- car
- bicycle
- motorcycle
version: 0.16-0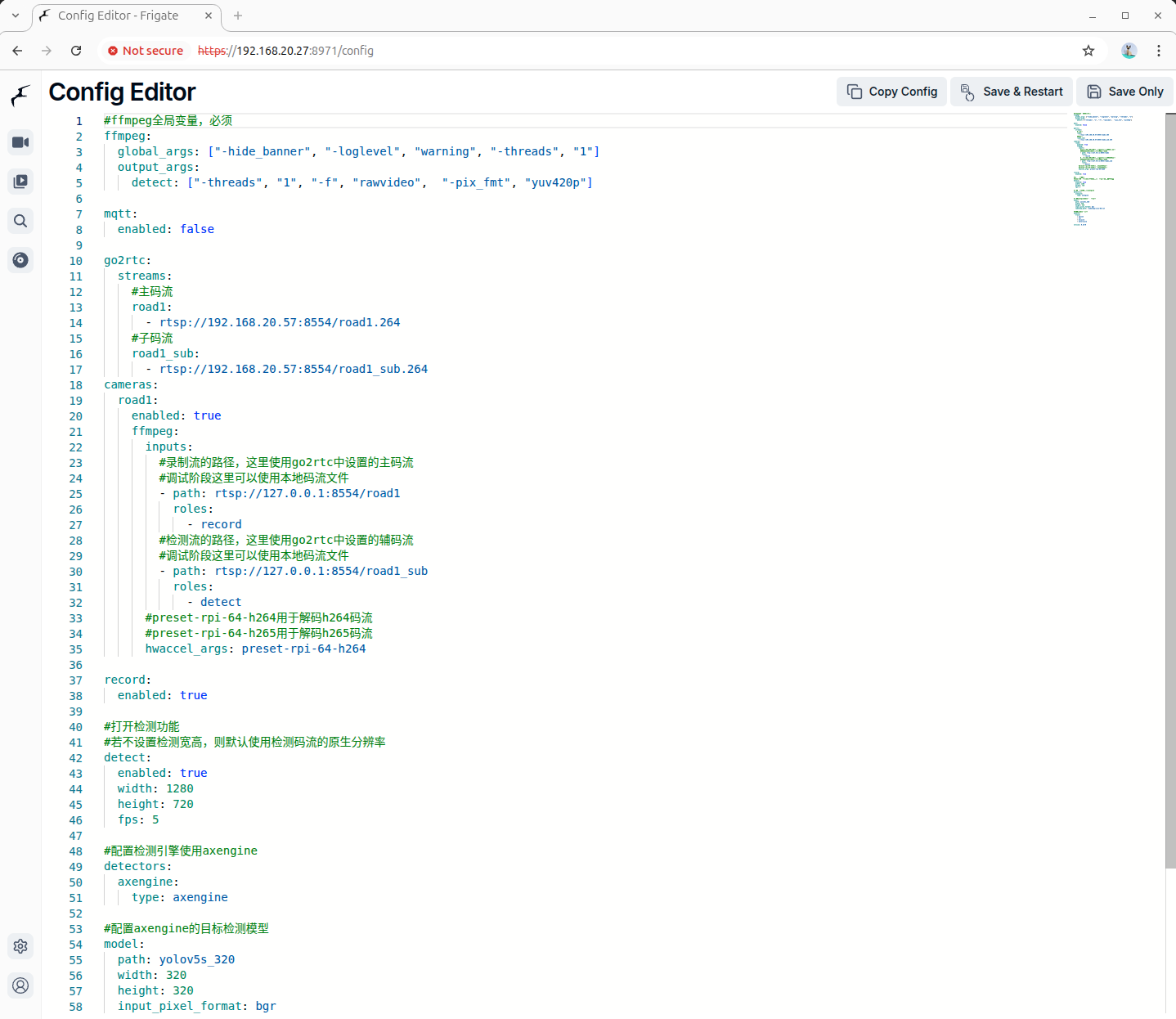
設定画面で構成をプレビュー可能
Page Tools