


Arduino 上手教程
2. 设备开发 & 案例程序
3. M5Unified
4. M5GFX
5. 拓展模块
Unit
Base
IoT
Unit UWB Arduino 使用教程
1. 准备工作
环境配置: 参考 Arduino IDE 上手教程完成 IDE 安装,并根据实际使用的开发板安装对应的板管理,与需要的驱动库。
使用到的驱动库:
使用到的硬件产品:


2. 注意事项
注意
该设备需要 2 个及以上才能实现测距或定位,如一个设备作 Tag 多个设备作 Anchor (想了解详细原理的可自行搜索)。
引脚兼容性
由于每款主机的引脚配置不同,使用前请参考产品文档中的引脚兼容表,并根据实际引脚连接情况修改案例程序。
3. 案例程序
本教程中使用的主控设备为一款 CoreS3 和两款 AtomS3 ,搭配三个 Unit UWB。本 Unit UWB 模块采用串口的方式通讯,根据实际的电路连接修改程序中的引脚定义,CoreS3 和 AtomS3 与模块连接后对应的串口 IO 均为
G1 (RX),G2 (TX)。本 Unit UWB 模块例程在 Anchor 的设置部分提供了基站编号设置的枚举
UWB_Anchor_num,用户根据实际需要修改函数setupmode()中的值即可( Tag 模式下任意编号均可)。Tag 部分程序:
cpp
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58
/*
* SPDX-FileCopyrightText: 2025 M5Stack Technology CO LTD
*
* SPDX-License-Identifier: MIT
*
*
* @Hardwares: M5CoreS3 + Unit UWB
* @Dependent Library:
* M5Unified: https://github.com/m5stack/M5Unified
* M5Unit_UWB: https://github.com/m5stack/M5Unit-UWB
*/
#include <M5Unified.h>
#include "M5_UWB.h"
M5_UWB Unit_UWB;
UWB_Mode Unit_UWB_Mode = UWB_Mode_Tag;
UWB_Anchor_num Unit_UWB_Tag = UWB_Anchor_0; // Select the anchor
bool Uwb_Init = 0;
uint8_t Tag_num = 0;
uint8_t UI_Init_flag = 0;
void UWB_UI_display();
void setup(){
M5.begin();
Serial.begin(115200);
Unit_UWB.begin(&Serial2, 22, 21, 115200);
Uwb_Init = Unit_UWB.setupmode(Unit_UWB_Mode, Unit_UWB_Tag, (char *)"5"); // Set the UWB mode and distance value
if(Uwb_Init){
Serial.println("UWB Init Success");
} else {
Serial.println("UWB Init Failed");
}
M5.Display.fillScreen(WHITE);
M5.Display.setTextColor(BLACK);
M5.Display.setFont(&fonts::FreeMonoBold9pt7b);
delay(100);
}
void loop(){
Tag_num = Unit_UWB.readstring();
UWB_UI_display();
delay(100);
}
void UWB_UI_display(){
if(UI_Init_flag == 0){
M5.Display.fillScreen(WHITE);
M5.Display.setCursor(0, 0);
M5.Display.println("UWB Test");
M5.Display.println("Tag Model, Distance: \r\n(uint: m)\r\n");
UI_Init_flag = 1;
}
M5.Display.fillRect(0, 60, 340, 240, WHITE);
M5.Display.setCursor(0, 60);
M5.Display.print(Unit_UWB.DATA);
Serial.println(Unit_UWB.DATA);
}- Anchor 部分程序:
cpp
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71
/*
* SPDX-FileCopyrightText: 2025 M5Stack Technology CO LTD
*
* SPDX-License-Identifier: MIT
*
*
* @Hardwares: AtomS3 + Unit UWB
* @Platform Version: Arduino M5Stack Board Manager v2.1.3
* @Dependent Library:
* M5Unified: https://github.com/m5stack/M5Unified
* M5Unit_UWB: https://github.com/m5stack/M5Unit-UWB
*/
#include <M5Unified.h>
#include "M5_UWB.h"
M5_UWB Unit_UWB;
UWB_Mode Unit_UWB_Mode = UWB_Mode_Base;
UWB_Anchor_num Unit_UWB_Anchor = UWB_Anchor_1; // Select the anchor point
bool Uwb_Init = 0;
uint8_t Tag_num = 0;
uint8_t UI_Init_flag = 0;
void UWB_UI_display();
const char* getAnchornNum(UWB_Anchor_num Num) {
switch (Num) {
case UWB_Anchor_0: return "Base_0";
case UWB_Anchor_1: return "Base_1";
case UWB_Anchor_2: return "Base_2";
case UWB_Anchor_3: return "Base_3";
case UWB_Anchor_4: return "Base_4";
default: return "Unknown";
}
}
void setup(){
M5.begin();
Serial.begin(115200);
Unit_UWB.begin(&Serial2, 1, 2, 115200);
Uwb_Init = Unit_UWB.setupmode(Unit_UWB_Mode, Unit_UWB_Anchor, (char *)"5"); // Set the UWB mode and distance value
if(Uwb_Init){
Serial.println("UWB Init Success");
} else {
Serial.println("UWB Init Failed");
}
M5.Display.fillScreen(WHITE);
M5.Display.setTextColor(BLACK);
M5.Display.setFont(&fonts::FreeMonoBold9pt7b);
delay(100);
}
void loop(){
Tag_num = Unit_UWB.readstring();
UWB_UI_display();
delay(100);
}
void UWB_UI_display(){
if(UI_Init_flag == 0){
M5.Display.fillScreen(WHITE);
M5.Display.setCursor(0, 0);
M5.Display.println("UWB Test");
M5.Display.println("Base Model");
const char * current_num = getAnchornNum(Unit_UWB_Anchor);
M5.Display.printf("Anchor: %s", current_num);
UI_Init_flag = 1;
}
M5.Display.setCursor(0, 80);
M5.Display.print(Unit_UWB.DATA);
Serial.println(Unit_UWB.DATA);
}3. 编译上传
下载模式:不同设备进行程序烧录前需要进入下载模式,不同的主控设备该步骤可能有所不同。详情可参考 Arduino IDE上手教程 页面底部的设备程序下载教程列表,查看具体的操作方式。
CoreS3,AtomS3 的烧录方式一致:长按复位按键 (大约 2 秒) 直到内部绿色 LED 灯亮起,便可松开,此时设备已进入下载模式,等待烧录。

.gif)
- 选中设备端口,点击 Arduino IDE 左上角编译上传按钮,等待程序完成编译并上传至设备。

4. 室内测距
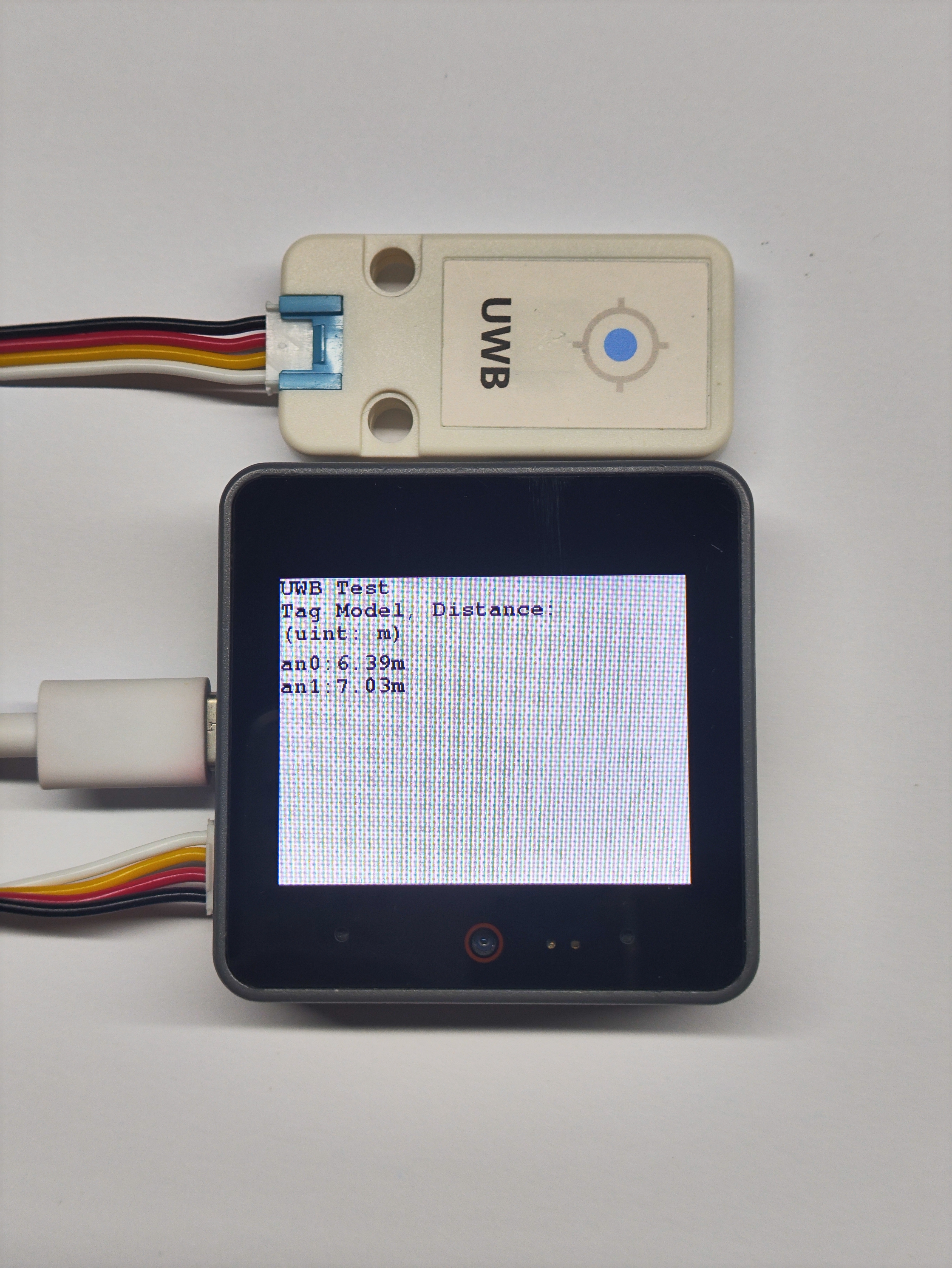
这里分别将两个 AtomS3 连接 Unit UWB 模块作为 Anchor,一个 CoreS3 连接 Unit UWB 模块作为 Tag(需要注意的是 Anchor 和 Tag 之间的距离最好在 5 - 50m 左右)
Tag 运行效果:
- Anchor 运行效果:

