产品上手指引
Linux PC
CardputerZero
AI 加速卡
LLM-8850 Card
AI 智能体
实时 AI 语音助手
火山引擎语音助手
工业控制
Ethernet 摄像头
PoECAM
Wi-Fi 摄像头
Unit CamS3/-5MP
AI 摄像头
LoRa & LoRaWAN
电机驱动
恢复出厂固件教程
拨码开关&引脚切换
Frigate
Frigate 是一个开源的 NVR,基于实时 AI 物体检测构建。所有处理均在您自己的硬件上本地执行,您的摄像头视频流从不会离开您的家。
- 手动下载程序 并上传到 raspberrypi5,或者通过以下命令拉取模型仓库。
提示
如果没有安装 git lfs,先参考git lfs 安装说明进行安装。
git clone -b rpi-axcl https://huggingface.co/AXERA-TECH/frigate-resource文件说明:
m5stack@raspberrypi:~/rsp/frigate-resource $ ls -lh
total 2.8G
-rw-rw-r-- 1 m5stack m5stack 48M Oct 9 16:46 axcl_host_aarch64_V3.6.5_20250908154509_NO4973.deb
-rw-rw-r-- 1 m5stack m5stack 648 Oct 9 16:41 docker-compose.yml
-rw-rw-r-- 1 m5stack m5stack 2.8G Oct 9 16:46 frigate-rpi-axcl-f8f387a.tar
-rw-rw-r-- 1 m5stack m5stack 3.7K Oct 9 16:41 README.md- 导入 docker 镜像
提示
如果没有安装 docker,先参考RaspberryPi docker 安装说明进行安装。
docker load -i frigate-resource/frigate-rpi-axcl-f8f387a.tar # 镜像文件可能升级,以实际文件名为准。- 准备工作目录
mkdir -p ~/frigate-runtime/{config,storage}
cp frigate-resource/docker-compose.yml ~/frigate-runtime/- 启动容器
cd ~/frigate-runtime/
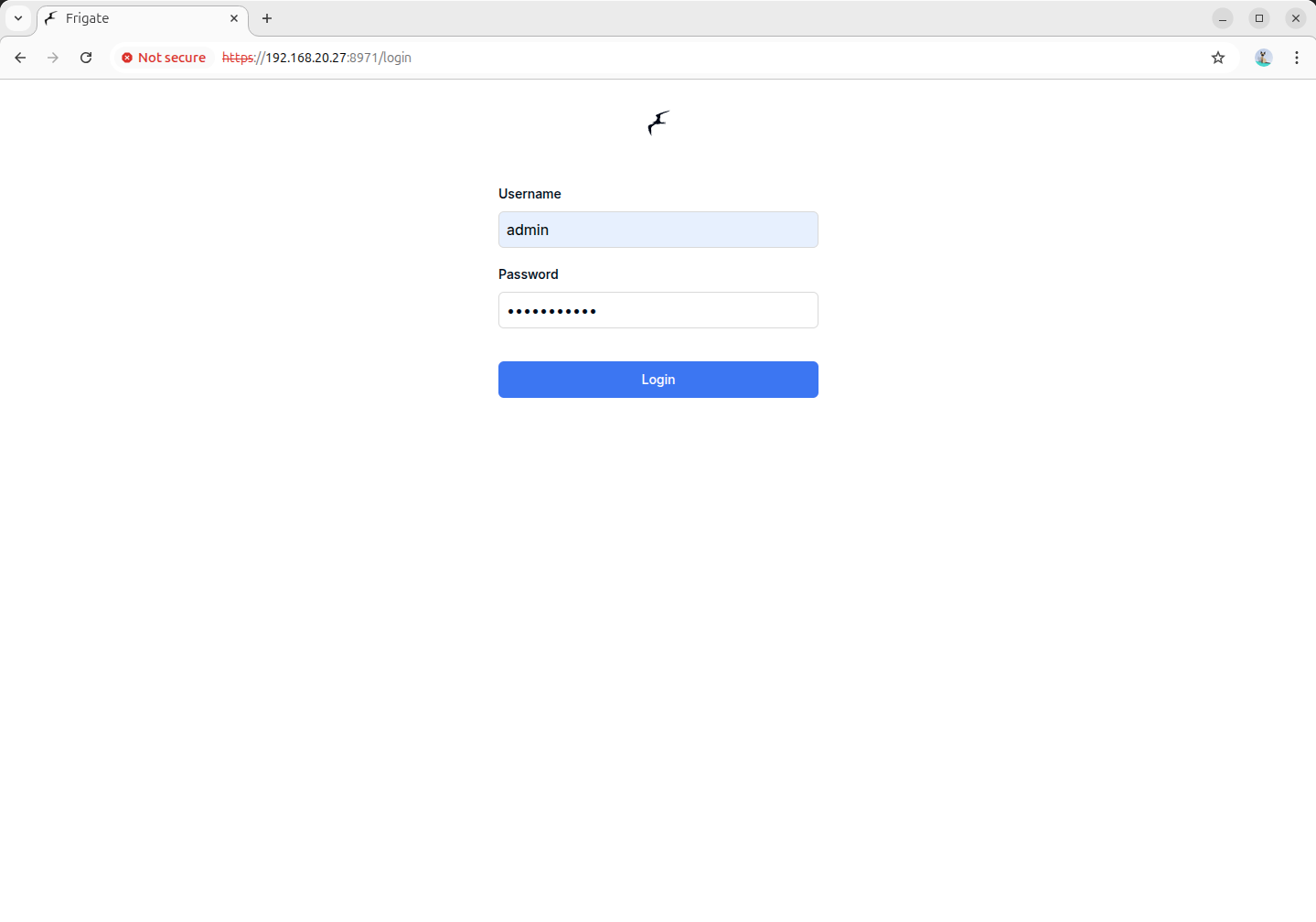
docker compose up -d- 通过 https://server_ip:8971 访问 Frigate 管理 Web
提示
默认用户名 admin 默认密码 axera123456
- 点击设置,配置参数,填入以下内容。go2rtc:部分修改为自己的 IP Camera 地址,保存并重启。
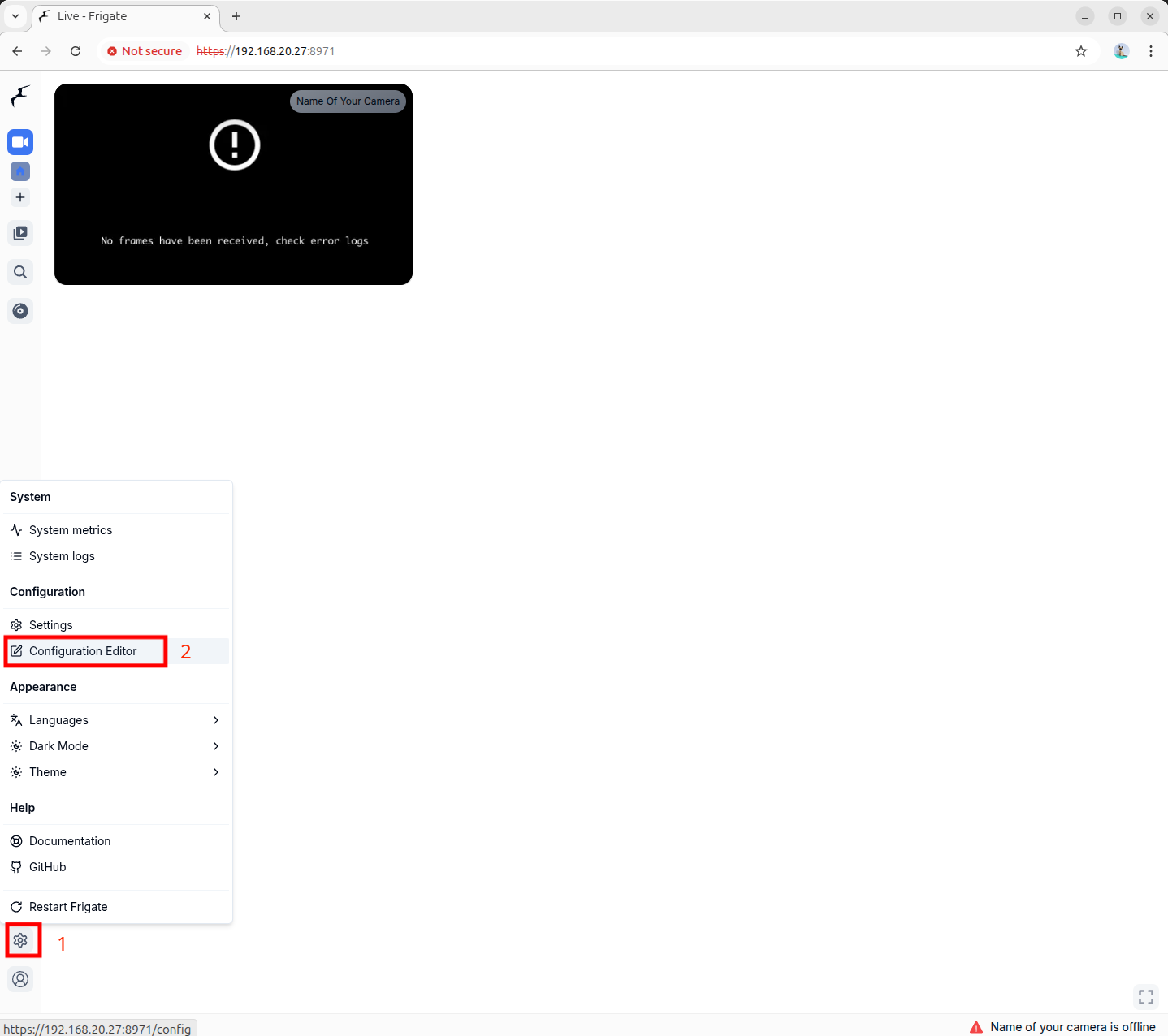
配置示例
#ffmpeg全局变量,必须
ffmpeg:
global_args: ["-hide_banner", "-loglevel", "warning", "-threads", "1"]
output_args:
detect: ["-threads", "1", "-f", "rawvideo", "-pix_fmt", "yuv420p"]
mqtt:
enabled: false
go2rtc:
streams:
#主码流
road1:
- rtsp://192.168.20.57:8554/road1.264
#子码流
road1_sub:
- rtsp://192.168.20.57:8554/road1_sub.264
cameras:
road1:
enabled: true
ffmpeg:
inputs:
#录制流的路径,这里使用go2rtc中设置的主码流
#调试阶段这里可以使用本地码流文件
- path: rtsp://127.0.0.1:8554/road1
roles:
- record
#检测流的路径,这里使用go2rtc中设置的辅码流
#调试阶段这里可以使用本地码流文件
- path: rtsp://127.0.0.1:8554/road1_sub
roles:
- detect
#preset-rpi-64-h264用于解码h264码流
#preset-rpi-64-h265用于解码h265码流
hwaccel_args: preset-rpi-64-h264
record:
enabled: true
#打开检测功能
#若不设置检测宽高,则默认使用检测码流的原生分辨率
detect:
enabled: true
width: 1280
height: 720
fps: 5
#配置检测引擎使用axengine
detectors:
axengine:
type: axengine
#配置axengine的目标检测模型
model:
path: yolov5s_320
width: 320
height: 320
input_pixel_format: bgr
labelmap_path: /labelmap/coco-80.txt
#要跟踪的目标类型
objects:
track:
- person
- car
- bicycle
- motorcycle
version: 0.16-0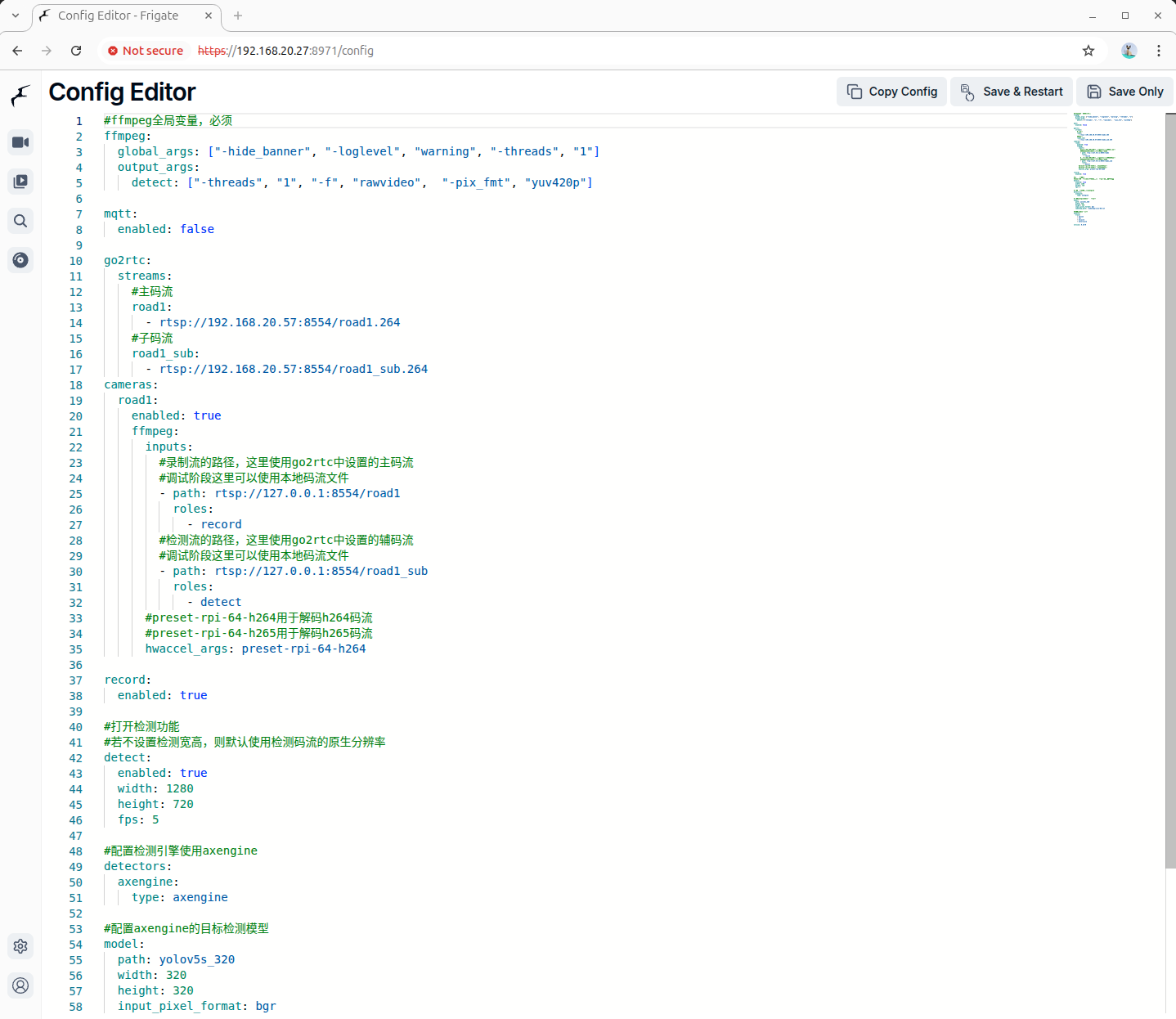
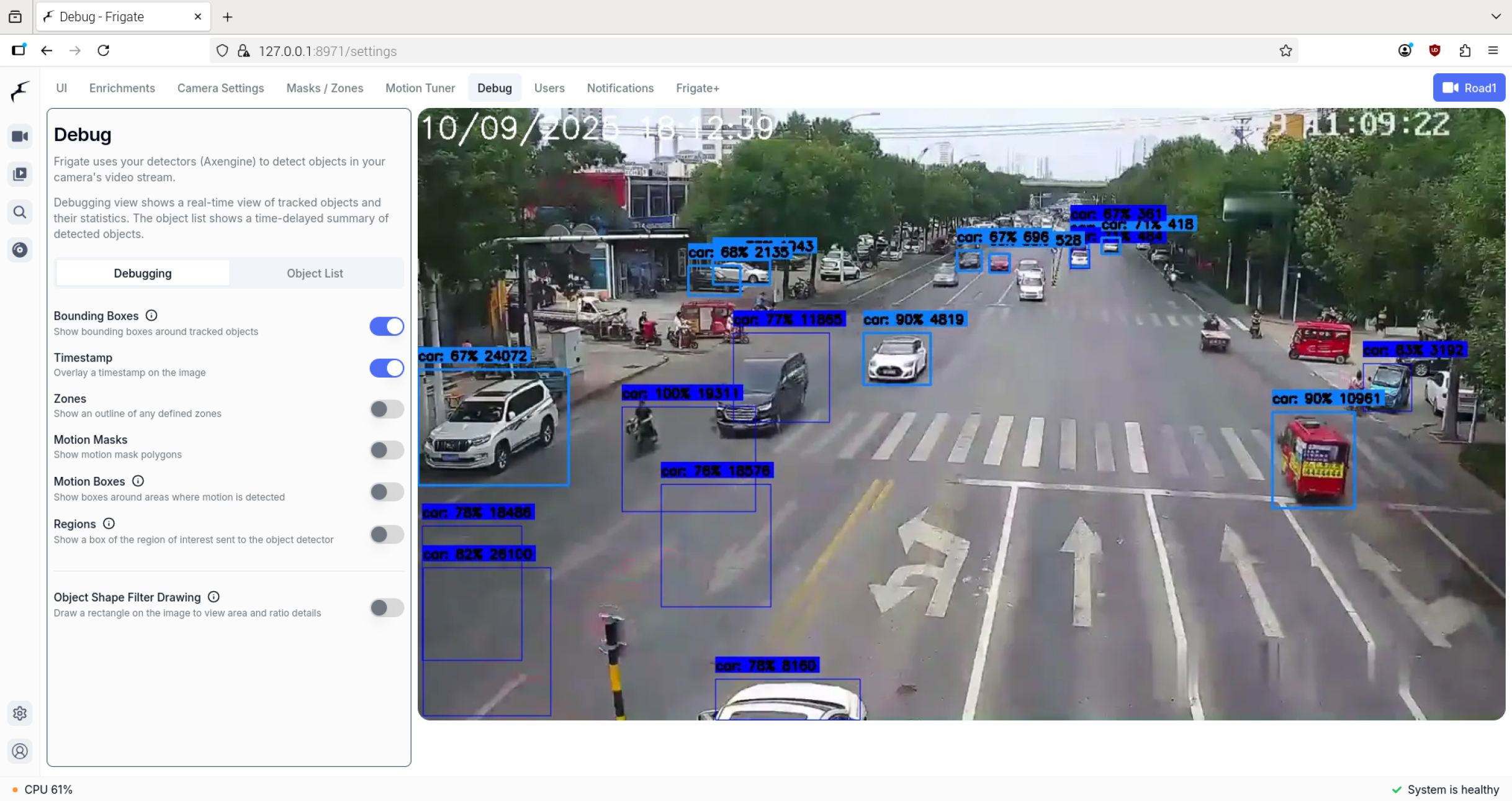
可以在设置中预览配置