Product Guide
Linux PC
AI アクセラレーターカード
LLM-8850 カード
LLM
リアルタイム音声アシスタント
XiaoZhi ボイスアシスタント
AtomS3R-M12 Volcengine Kit
Industrial Control
IoT Measuring Instruments
Air Quality
PowerHub
Module13.2 PPS
VAMeter
T-Lite
Ethernet Camera
PoECAM
Wi-Fi Camera
Unit CamS3/-5MP
AI Camera
LoRa & LoRaWAN
Motor Control
ファームウェアの初期化
ディップスイッチ&ピン切り替え
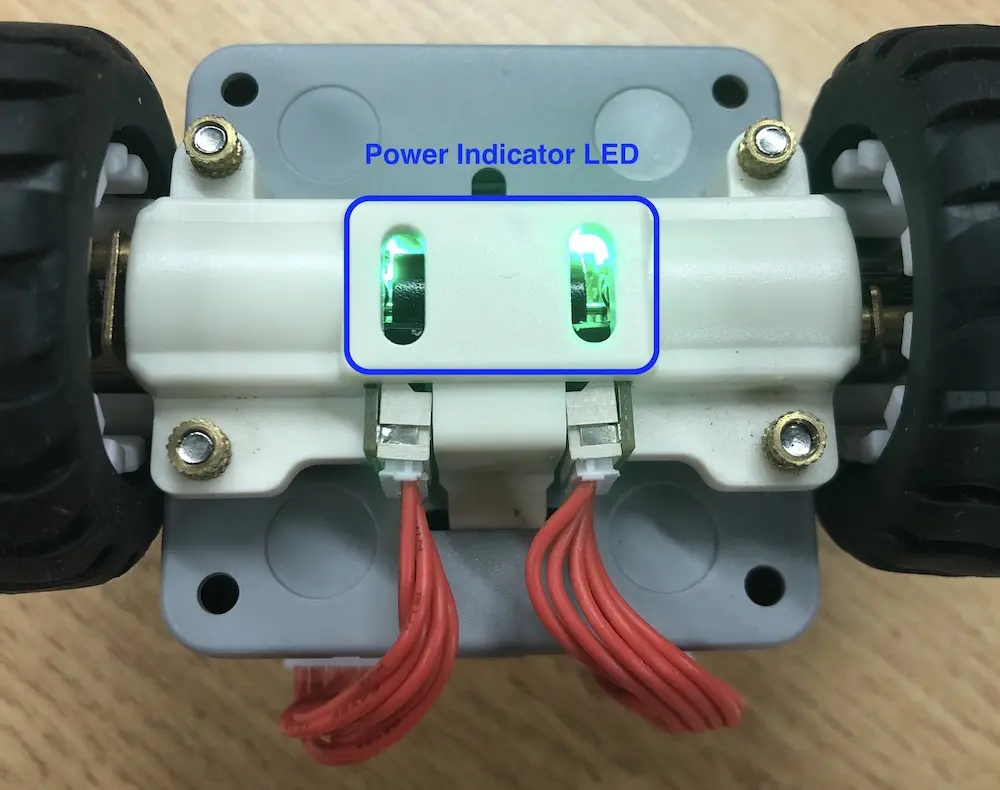
BALA 初心者ガイド
M5Balaの使用には、M5Stack FIREまたはM5GO(白色)が必要です。

開発環境です
UIFlow編集
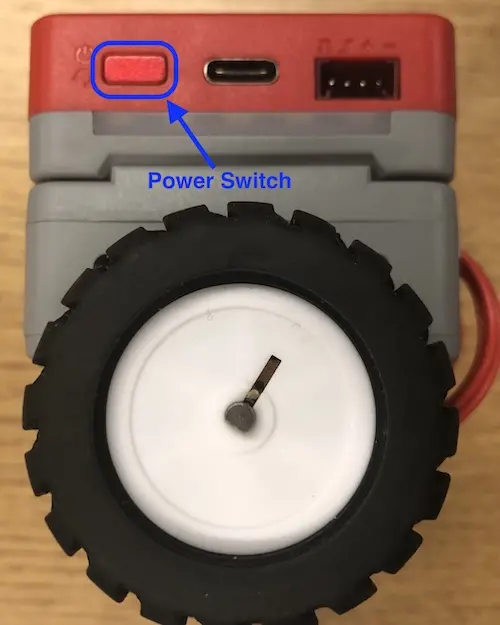
- M5Coreの側面の赤いボタンを押して電源を入力(速やかに二度押すと電源を切ります)。
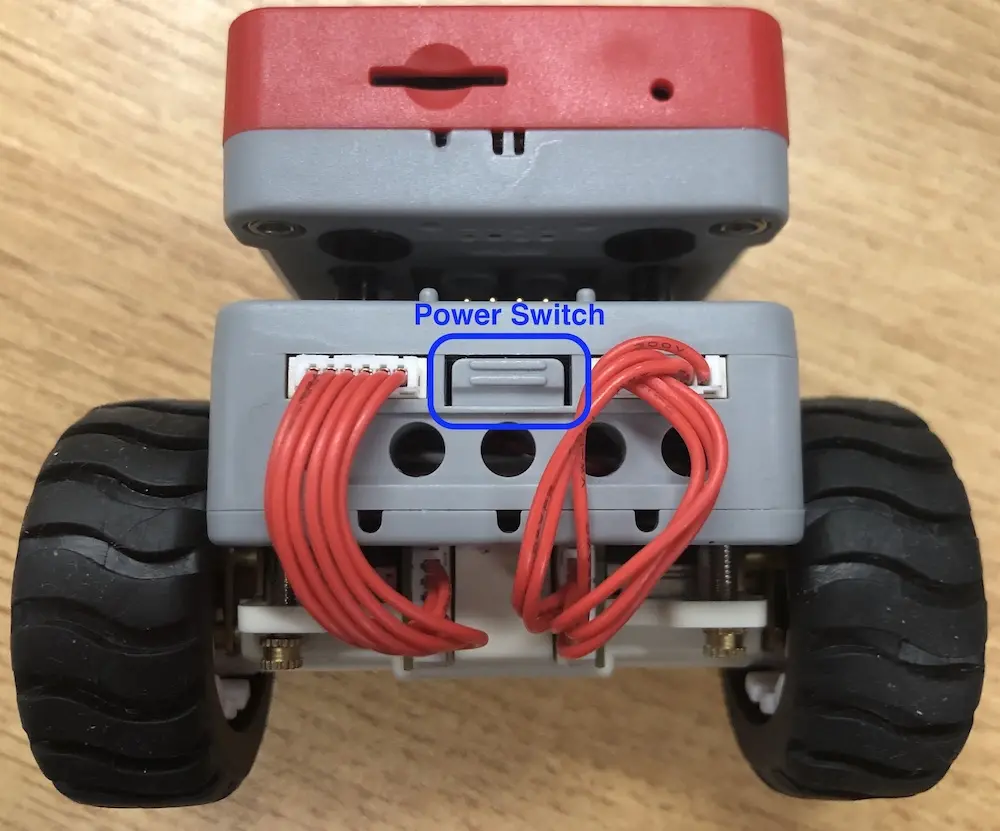
- M5Balaのベースのボタンを押して電源を入力(連続で二度押すと電源を切ります)。
- UIFlowにアクセスし、プログラミングモードのBlocklyをPythonに切り替えます。
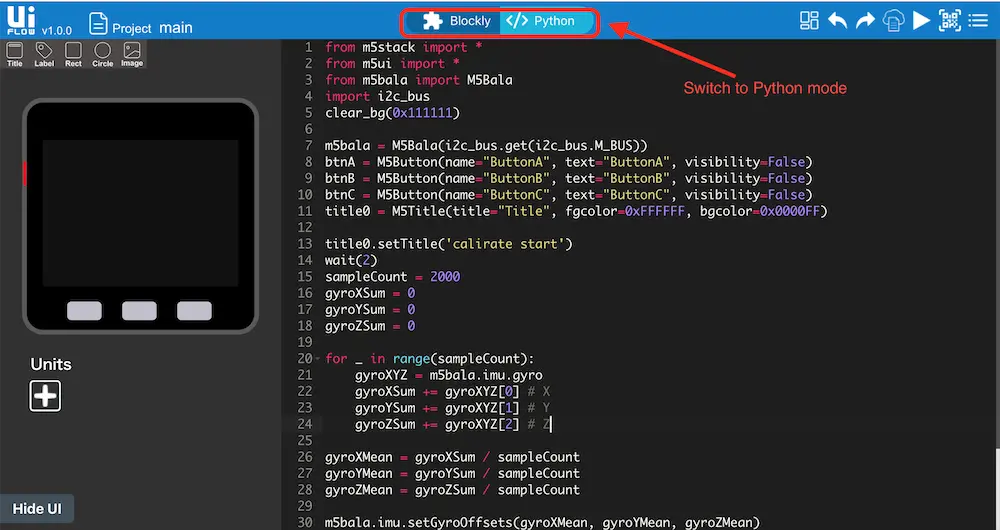
- 以下のコードをコピー&ペーストし、プログラムを実行します。
from m5stack import *
from m5ui import *
from m5bala import M5Bala
import i2c_bus
clear_bg(0x111111)
m5bala = M5Bala(i2c_bus.get(i2c_bus.M_BUS))
btnA = M5Button(name="ButtonA", text="ButtonA", visibility=False)
btnB = M5Button(name="ButtonB", text="ButtonB", visibility=False)
btnC = M5Button(name="ButtonC", text="ButtonC", visibility=False)
title0 = M5Title(title="Title", fgcolor=0xFFFFFF, bgcolor=0x0000FF)
title0.setTitle('calirate start')
wait(2)
sampleCount = 2000
gyroXSum = 0
gyroYSum = 0
gyroZSum = 0
for _ in range(sampleCount):
gyroXYZ = m5bala.imu.gyro
gyroXSum += gyroXYZ[0] # X
gyroYSum += gyroXYZ[1] # Y
gyroZSum += gyroXYZ[2] # Z
gyroXMean = gyroXSum / sampleCount
gyroYMean = gyroYSum / sampleCount
gyroZMean = gyroZSum / sampleCount
m5bala.imu.setGyroOffsets(gyroXMean, gyroYMean, gyroZMean)
title0.setTitle('balance start')
while True:
m5bala.balance()
wait(0.001)Arduino IDE编辑
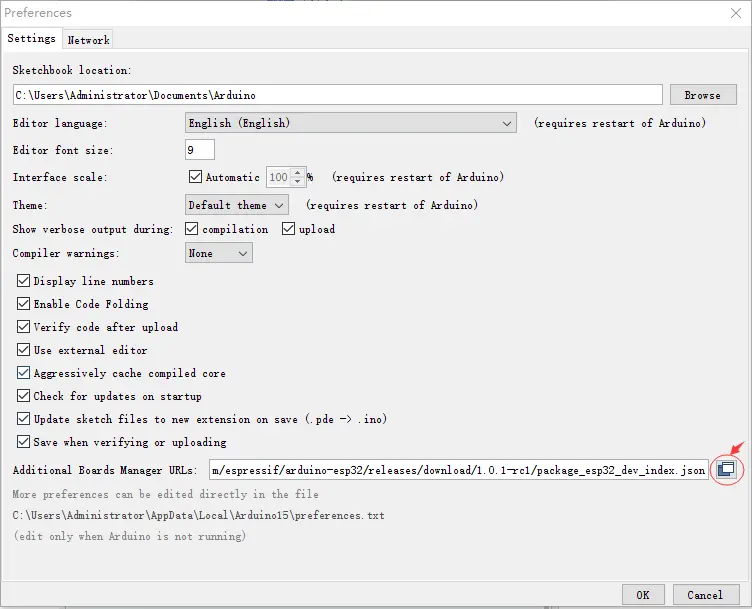
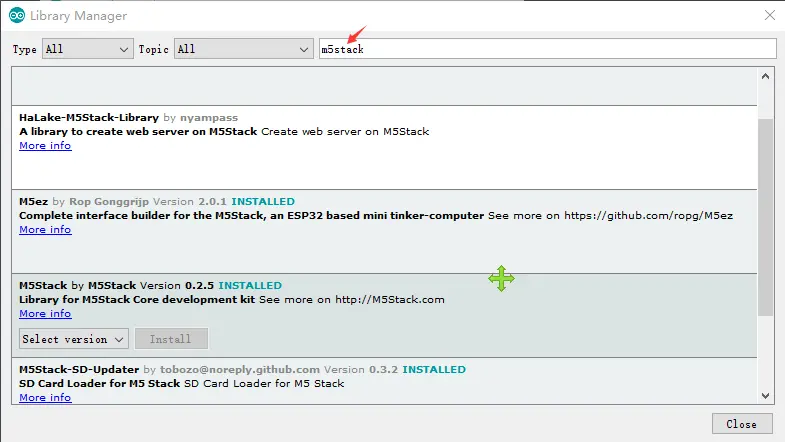
- Arduino IDEのライブラリ管理からm5stackライブラリをインストール
- Arduino IDEのライブラリ管理からNeoPixelBusライブラリをインストール
- Arduino IDEのライブラリ管理からMPU6050_tocknライブラリをインストール
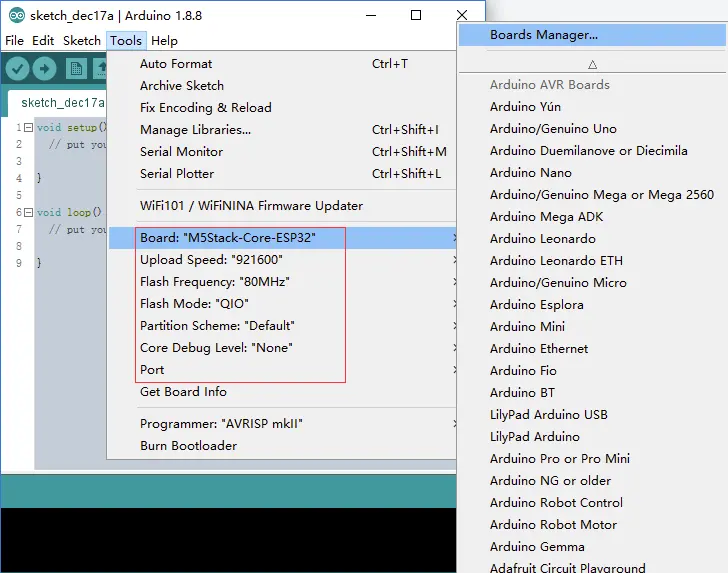
M5Coreをコンピュータに接続。Tools->Portで使用するシリアルポートを選択。
開発板Boardの選択肢からM5Stack-Core-ESP32またはM5Stack-Fireを選択。
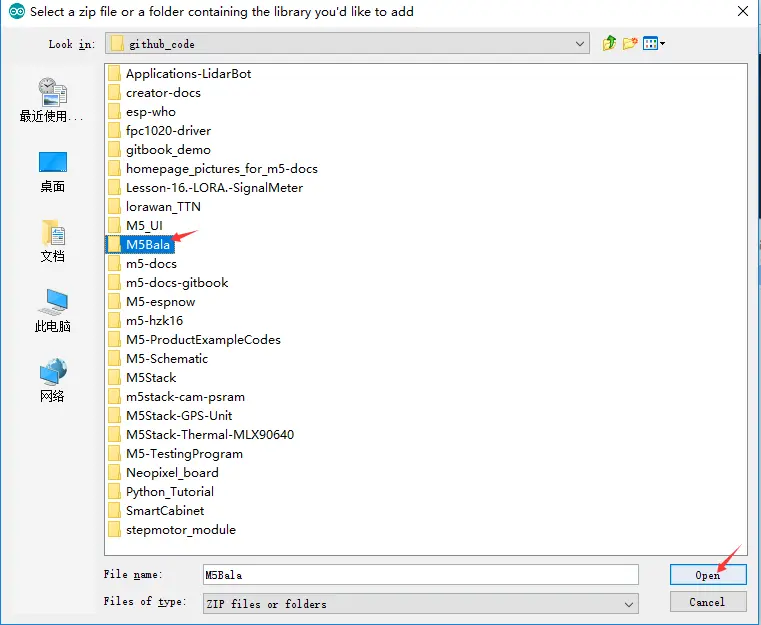
- をShellコマンドでダウンロード M5Balaのサンプルプログラム . Gitが未インストールの場合は、, ここをクリック 进してダウンロードを行ってください。.
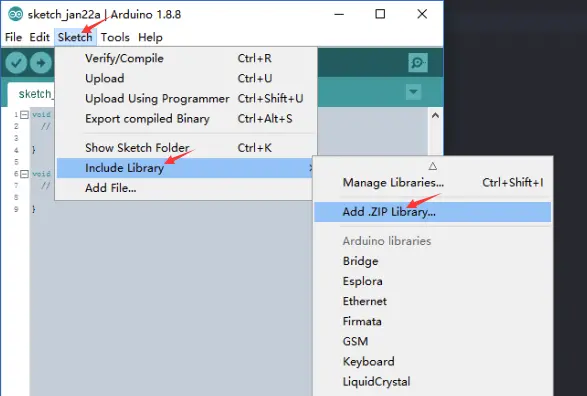
git clone --recursive https://github.com/m5stack/M5Bala.git- Sketch -> Include Library -> Add .ZIP Library...をクリック。ダウンロードしたM5Balaのファイルを選択。
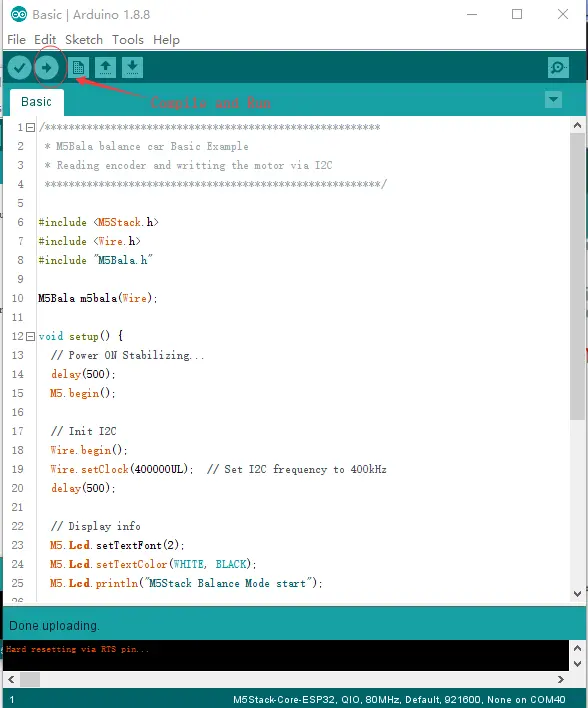
- BALAのプログラムサンプルを開く:File -> Examples -> M5Bala -> Basicをクリック。
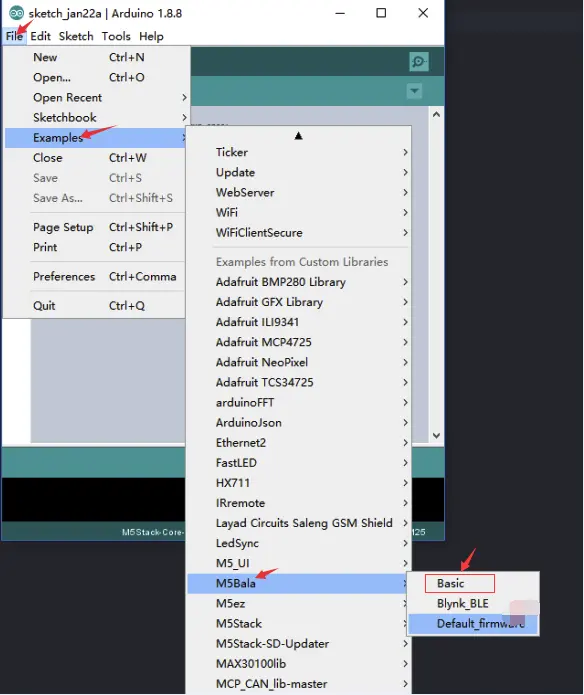
- プログラムをコンパイルし、アップロード。