

Arduino入門
2. デバイス&サンプル
3. M5Unified
4. M5GFX
5. 拡張モジュール&サンプル
Unit
Atomic
Tab5
IoT
アクセサリー
Paper Touch タッチスクリーン
Paper のタッチスクリーンに関連する API とサンプルプログラムです。
サンプルプログラム
コンパイル要件
- M5Stack ボードマネージャのバージョン >= 2.1.4
- 使用ボード = M5Paper
- M5Unified ライブラリのバージョン >= 0.2.5
- M5GFX ライブラリのバージョン >= 0.2.7
cpp
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29
#include <M5Unified.h>
#include <M5GFX.h>
m5::touch_detail_t touchDetail;
uint16_t color;
void setup() {
M5.begin();
M5.Display.setRotation(0);
M5.Display.setFont(&fonts::DejaVu40);
M5.Display.setEpdMode(epd_fastest); // epd_quality, epd_text, epd_fast, epd_fastest
color = random(65535);
Serial.begin(115200);
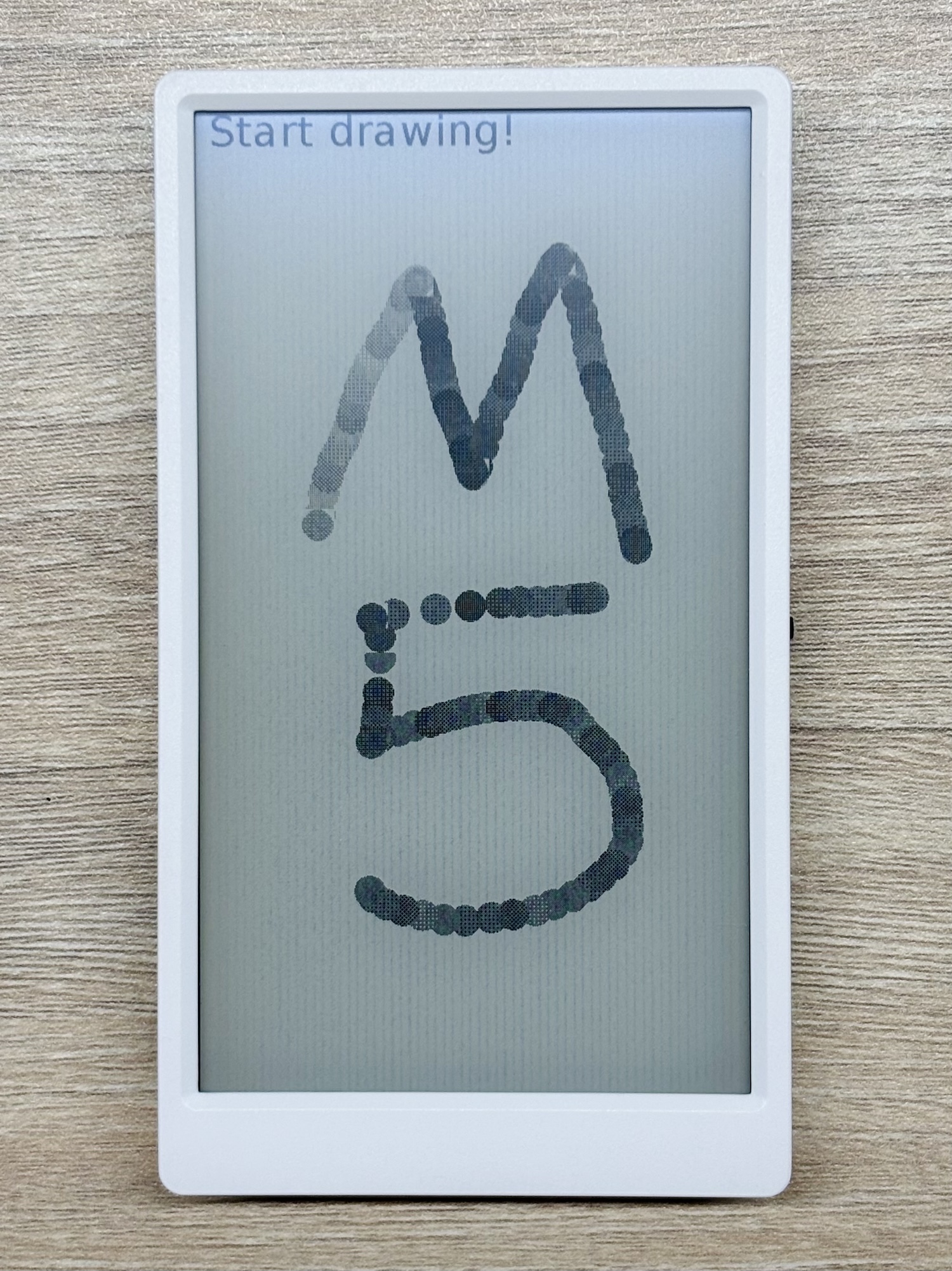
Serial.println("Start drawing!");
M5.Display.print(" Start drawing! ");
}
void loop() {
M5.update();
touchDetail = M5.Touch.getDetail();
if (touchDetail.isPressed()) {
Serial.printf("x:%d, y:%d\r\n", touchDetail.x, touchDetail.y);
color = (color + 5) % 65536;
M5.Display.fillCircle(touchDetail.x, touchDetail.y, 15, color);
}
}このプログラムの主な機能は、指で画面に触れると、タッチポイントの座標をシリアル経由でパソコンに出力し、その位置に異なるグレースケールの円を描画することです。プログラムではタッチポイントを1つだけ読み取りますが、以下の API を使用して Paper の2点マルチタッチ機能を開発することもできます。
API
Paper のタッチスクリーンは M5Unified ライブラリの Touch_Class を使用しています。さらに詳しい API 情報は、以下のドキュメントをご参照ください:
Page Tools