

Arduino入門
2. デバイス&サンプル
3. M5Unified
4. M5GFX
5. 拡張モジュール&サンプル
Unit
Atomic
Tab5
IoT
アクセサリー
Fire IMU 六軸姿勢センサー
Fire IMU 六軸姿勢センサーに関連する API とサンプルプログラムです。
サンプルプログラム
コンパイル要件
- M5Stack ボードマネージャーバージョン >= 3.2.2
- ボードオプション = M5Fire
- M5Unified ライブラリバージョン >= 0.2.8
- M5GFX ライブラリバージョン >= 0.2.11
cpp
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23
#include <M5Unified.h>
m5::imu_data_t imuData;
void setup() {
M5.begin();
M5.Display.setFont(&fonts::FreeMonoBold9pt7b);
M5.Display.clear();
M5.Display.setCursor(0, 0);
M5.Display.print("IMU Live Data");
}
void loop() {
M5.Imu.update();
imuData = M5.Imu.getImuData();
M5.Display.setCursor(0, 30);
M5.Display.println(" x y z");
M5.Display.printf("Acce % 6.2f, % 6.2f, % 6.2f\n", imuData.accel.x, imuData.accel.y, imuData.accel.z);
M5.Display.printf("Gyro % 6.2f, % 6.2f, % 6.2f\n", imuData.gyro.x, imuData.gyro.y, imuData.gyro.z);
delay(100);
}実行結果:

API
Fire IMU 六軸姿勢センサーは M5Unified ライブラリの IMU_Class を使用しています。さらに関連する API については、以下のドキュメントを参照してください:
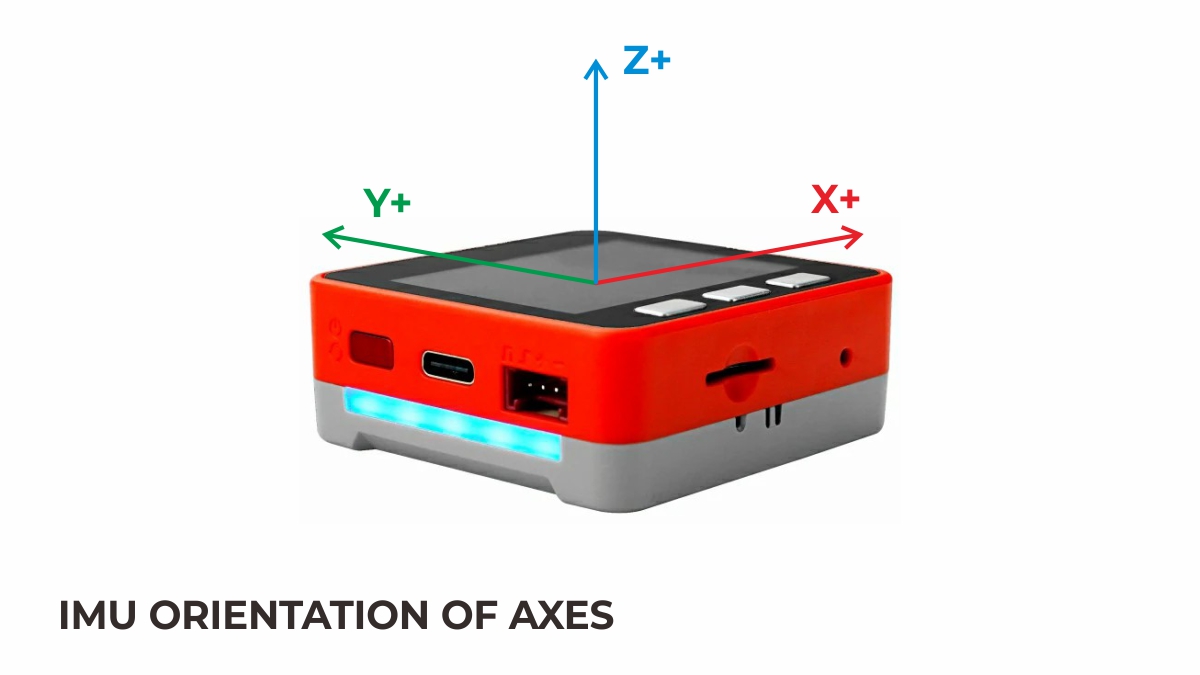
IMU 三軸方向模式図
- Fire v2.7:
Page Tools