

Arduino Quick Start
2. Devices & Examples
3. M5Unified
4. M5GFX
5. Extensions
Unit
Atomic
Tab5
IoT
Accessories
Cap LoRa868 / LoRa-1262 Arduino Tutorial
This tutorial applies to Cap LoRa868 and Cap LoRa-1262.
1. Preparation
- Environment setup: Refer to Arduino IDE Getting Started Tutorial to complete the IDE installation, and install the corresponding board manager and required driver libraries according to the actual development board used.
- Required driver libraries:
- Required hardware products:


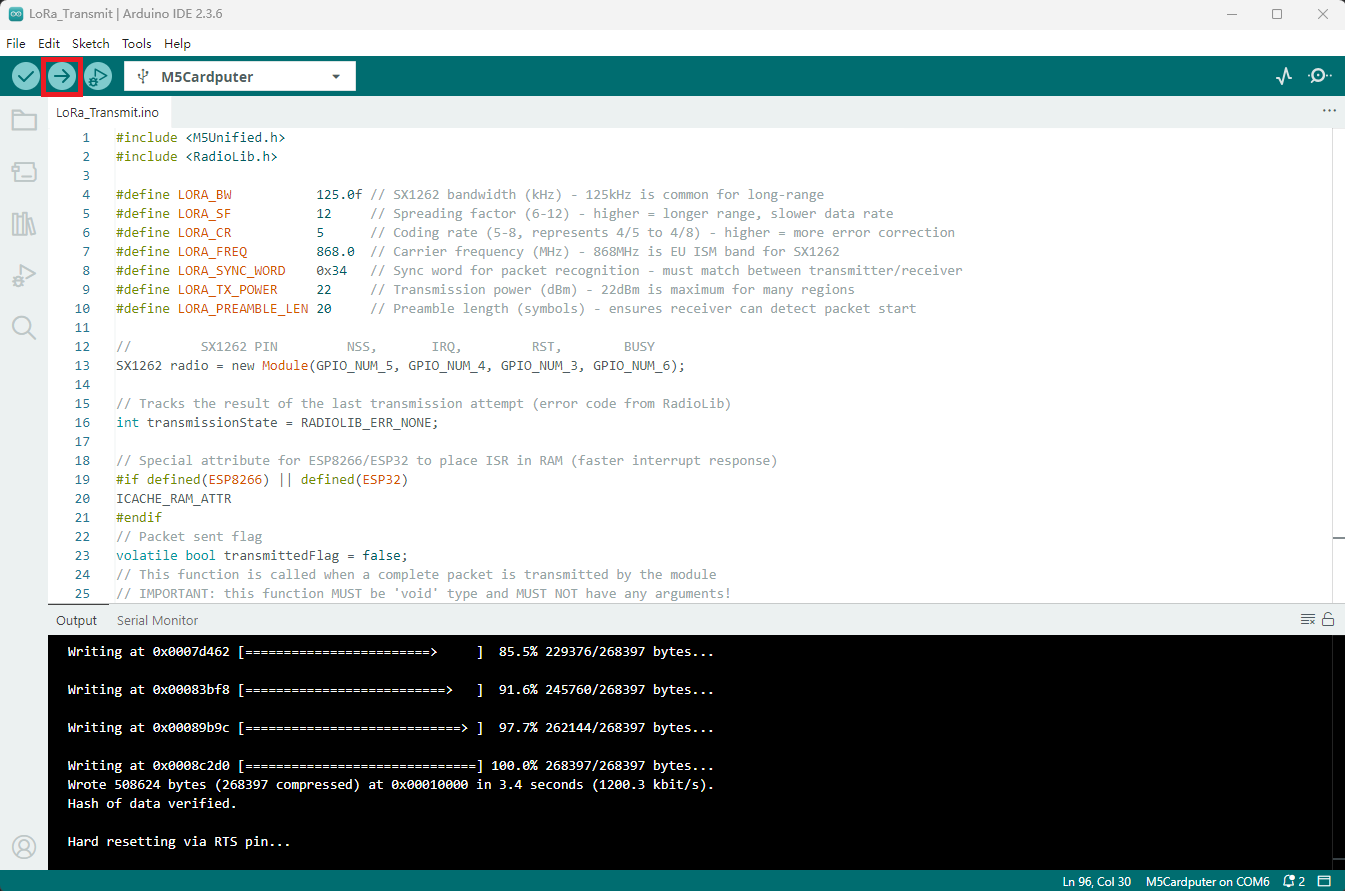
2. Compile & Upload
- Set the power switch on the side of the Cardputer-Adv to the
OFFposition, then press and hold theG0button before powering on the device, and release it after powering on from the back of the device. The device will then enter download mode, waiting for flashing.

- Select the device port, click the compile/upload button in the upper left corner of the Arduino IDE, and wait for the program to be compiled and uploaded to the device.
3. Example Program
- The main controller used in this tutorial is Cardputer-Adv, paired with Cap LoRa868. The LoRa module of Cap LoRa868 communicates via SPI, while the GPS module communicates via UART. Please modify the pin definitions in the program according to the actual circuit connections. After the device is connected, the corresponding LoRa SPI IO pins are
G5 (NSS),G14 (MOSI),G39 (MISO), andG40 (SCK); other IO pins areG4 (TRQ),G3 (RST), andG6 (BUSY); the UART IO pins areG15 (RX)andG13 (TX).
The physical connection assembly is shown in the figure below:

3.1 LoRa Usage Example
NSS, TRQ, GD02, and RST pins are set. However, the RadioLib library will automatically map the remaining SPI pins (MOSI, MISO, SCK) according to the controller being used. When initialized with the M5Unified library, the default pins for different devices are defined automatically. For Cardputer-Adv, they are G14 (MOSI), G39 (MISO), and G40 (SCK), so manual specification is not required.Transmitter
#include <M5Unified.h>
#include <RadioLib.h>
#include "utility/PI4IOE5V6408_Class.hpp"
#define LORA_BW 125.0f // SX1262 bandwidth (kHz) - 125kHz is common for long-range
#define LORA_SF 12 // Spreading factor (6-12) - higher = longer range, slower data rate
#define LORA_CR 5 // Coding rate (5-8, represents 4/5 to 4/8) - higher = more error correction
#define LORA_FREQ 868.0 // Carrier frequency (MHz) - 868MHz is EU ISM band for SX1262
#define LORA_SYNC_WORD 0x34 // Sync word for packet recognition - must match between transmitter/receiver
#define LORA_TX_POWER 22 // Transmission power (dBm) - 22dBm is maximum for many regions
#define LORA_PREAMBLE_LEN 20 // Preamble length (symbols) - ensures receiver can detect packet start
// SX1262 PIN NSS, IRQ, RST, BUSY
SX1262 radio = new Module(GPIO_NUM_5, GPIO_NUM_4, GPIO_NUM_3, GPIO_NUM_6);
// Tracks the result of the last transmission attempt (error code from RadioLib)
int transmissionState = RADIOLIB_ERR_NONE;
// Special attribute for ESP8266/ESP32 to place ISR in RAM (faster interrupt response)
#if defined(ESP8266) || defined(ESP32)
ICACHE_RAM_ATTR
#endif
// Packet sent flag
volatile bool transmittedFlag = false;
// This function is called when a complete packet is transmitted by the module
// IMPORTANT: this function MUST be 'void' type and MUST NOT have any arguments!
void setFlag(void)
{
// we sent a packet, set the flag
transmittedFlag = true;
}
String LoRaName;
m5::PI4IOE5V6408_Class ioe(0x43, 400000, &m5::In_I2C);
void setup()
{
M5.begin();
Serial.begin(115200);
// Cap LoRa-1262 Detection
if (!m5::In_I2C.begin()) {
Serial.println("I2C init failed");
while (true) delay(1000);
}
if (ioe.begin()) {
Serial.printf("Using Cap LoRa-1262\n");
LoRaName = "LoRa-1262";
ioe.setDirection(0, true); // Output
ioe.setHighImpedance(0, false); // Disable high-impedance so pin can actually drive
ioe.digitalWrite(0, true); // High Level
} else {
Serial.printf("Using Cap LoRa868\n");
LoRaName = "LoRa868";
}
M5.Display.setFont(&fonts::FreeMonoBold9pt7b);
// Init SX1262
Serial.printf("[%s] Initializing ...", LoRaName);
int state =
radio.begin(LORA_FREQ, LORA_BW, LORA_SF, LORA_CR, LORA_SYNC_WORD, LORA_TX_POWER, LORA_PREAMBLE_LEN, 3.0, true);
if (state == RADIOLIB_ERR_NONE) {
Serial.println(F("Init success!"));
} else {
Serial.print(F("Init failed, code: "));
Serial.println(state);
while (true) { delay(10); }
}
radio.setCurrentLimit(140);// Current range: 0-140mA , step 2.5mA
// Register callback function after sending packet successfully
radio.setPacketSentAction(setFlag);
// Send first packet to enable flag
Serial.printf("[%s] Sending first packet...", LoRaName);
transmissionState = radio.startTransmit("Hello World!");
M5.Display.setCursor(5,0);
M5.Display.printf("Hello World!\n");
}
// Counter to keep track of transmitted packets
int count = 0;
void loop()
{
if (transmittedFlag) {
// reset flag
transmittedFlag = false;
if (transmissionState == RADIOLIB_ERR_NONE) {
// packet was successfully sent
Serial.println(F("Transmission finished!"));
M5.Display.println("Send sucessfully!");
// NOTE: when using interrupt-driven transmit method,
// it is not possible to automatically measure
// transmission data rate using getDataRate()
} else {
Serial.print(F("Send failed, code: "));
Serial.println(transmissionState);
M5.Display.print("\nSend failed\ncode:");
M5.Display.println(transmissionState);
}
// Clean up after transmission is finished
// This will ensure transmitter is disabled,
// RF switch is powered down etc.
radio.finishTransmit();
// Wait a second before transmitting again
delay(1000);
Serial.printf("[%s] Sending #%d packet ... ", LoRaName, count);
// You can transmit C-string or Arduino string up to 256 characters long
String str = "Cap " + LoRaName + "#" + String(count++);
transmissionState = radio.startTransmit(str);
M5.Display.clear();
M5.Display.setCursor(0,5);
M5.Display.printf("[%s]\nSending #%d packet\n......\n", LoRaName, count);
// You can also transmit byte array up to 256 bytes long
/*
byte byteArr[] = {0x01, 0x23, 0x45, 0x67,
0x89, 0xAB, 0xCD, 0xEF};
transmissionState = radio.startTransmit(byteArr, 8);
*/
}
}Receiver
#include <M5Unified.h>
#include <RadioLib.h>
#include "utility/PI4IOE5V6408_Class.hpp"
#define LORA_BW 125.0f // LoRa bandwidth (kHz) - 125kHz is common for long-range
#define LORA_SF 12 // Spreading factor (6-12) - higher = longer range, slower data rate
#define LORA_CR 5 // Coding rate (5-8, represents 4/5 to 4/8) - higher = more error correction
#define LORA_FREQ 868.0 // Carrier frequency (MHz) - 868MHz is EU ISM band for LoRa
#define LORA_SYNC_WORD 0x34 // Sync word for packet recognition - must match between transmitter/receiver
#define LORA_TX_POWER 22 // Transmission power (dBm) - 22dBm is maximum for many regions
#define LORA_PREAMBLE_LEN 20 // Preamble length (symbols) - ensures receiver can detect packet start
// SX1262 PIN NSS, IRQ, RST, BUSY
SX1262 radio = new Module(GPIO_NUM_5, GPIO_NUM_4, GPIO_NUM_3, GPIO_NUM_6);
#if defined(ESP8266) || defined(ESP32)
ICACHE_RAM_ATTR
#endif
// Packet received flag
volatile bool receivedFlag = false;
// This function is called when a complete packet is received by the module
// IMPORTANT: This function MUST be 'void' type and MUST NOT have any arguments!
void setFlag(void)
{
receivedFlag = true;
}
String LoRaName;
m5::PI4IOE5V6408_Class ioe(0x43, 400000, &m5::In_I2C);
void setup()
{
M5.begin();
Serial.begin(115200);
// Cap LoRa-1262 Detection
if (!m5::In_I2C.begin(I2C_NUM_0, 8, 9)) {
Serial.println("I2C init failed");
while (true) delay(1000);
}
if (ioe.begin()) {
Serial.printf("Using Cap LoRa-1262\n");
LoRaName = "LoRa-1262";
ioe.setDirection(0, true); // output
ioe.setHighImpedance(0, false); // disable high-impedance so pin can actually drive
ioe.digitalWrite(0, true); // default low
} else {
Serial.printf("Using Cap LoRa868\n");
LoRaName = "LoRa868";
}
M5.Display.setFont(&fonts::FreeMonoBold9pt7b);
// Init SX1262
Serial.printf("[%s] Initializing ... ", LoRaName);
int state = radio.begin(LORA_FREQ, LORA_BW, LORA_SF, LORA_CR, LORA_SYNC_WORD, LORA_TX_POWER, LORA_PREAMBLE_LEN, 3.0, true);
if (state == RADIOLIB_ERR_NONE) {
Serial.println(F("Init success!"));
} else {
Serial.print(F("Init failed, code: "));
Serial.println(state);
while (true) { delay(10); }
}
radio.setCurrentLimit(140);// Current range: 0-140mA , step 2.5mA
// Register callback function after receiving packet successfully
radio.setPacketReceivedAction(setFlag);
// Start listening for LoRa packets
Serial.printf("[%s] Starting to listen ... ", LoRaName);
state = radio.startReceive();
if (state == RADIOLIB_ERR_NONE) {
Serial.println(F("Listen successfully!"));
} else {
Serial.print(F("Listen failed, code: "));
Serial.println(state);
while (true) { delay(10); }
}
// If needed, 'listen' mode can be disabled by calling any of the following methods:
// radio.standby()
// radio.sleep()
// radio.transmit();
// radio.receive();
// radio.scanChannel();
}
void loop()
{
if (receivedFlag) {
// reset flag
receivedFlag = false;
// Read received data as an Arduino String
String str;
int state = radio.readData(str);
// Read received data as byte array
/*
byte byteArr[8];
int numBytes = radio.getPacketLength();
int state = radio.readData(byteArr, numBytes);
*/
if (state == RADIOLIB_ERR_NONE) {
// Packet was successfully received
Serial.printf("[%s] Received packet:\n", LoRaName);
M5.Display.clear();
M5.Display.setCursor(0,5);
M5.Display.printf("[%s]\nReceived packet:\n", LoRaName);
// Data of the packet
Serial.printf("[%s] Data:\t\t", LoRaName);
Serial.println(str);
M5.Display.printf("Data: %s\n", str.c_str());
// RSSI (Received Signal Strength Indicator)
Serial.printf("[%s] RSSI:\t\t", LoRaName);
Serial.print(radio.getRSSI());
Serial.println(F(" dBm"));
M5.Display.printf("RSSI: %0.2f dBm\n", radio.getRSSI());
// SNR (Signal-to-Noise Ratio)
Serial.printf("[%s] SNR:\t\t", LoRaName);
Serial.print(radio.getSNR());
Serial.println(F(" dB"));
M5.Display.printf("SNR: %0.2f dB\n", radio.getSNR());
// Frequency error
Serial.printf("[%s] Frequency error:\t", LoRaName);
Serial.print(radio.getFrequencyError());
Serial.println(F(" Hz"));
M5.Display.printf("Freq err: %0.2f Hz\n", radio.getFrequencyError());
} else if (state == RADIOLIB_ERR_CRC_MISMATCH) {
// Packet was received, but is malformed
Serial.println(F("CRC error!"));
} else {
Serial.print(F("Receive failed, code: "));
Serial.println(state);
}
}
}The above example’s effect: the sending end will send a string containing a counter every second; the receiving end will print the received string and display RSSI, SNR, and frequency error information.
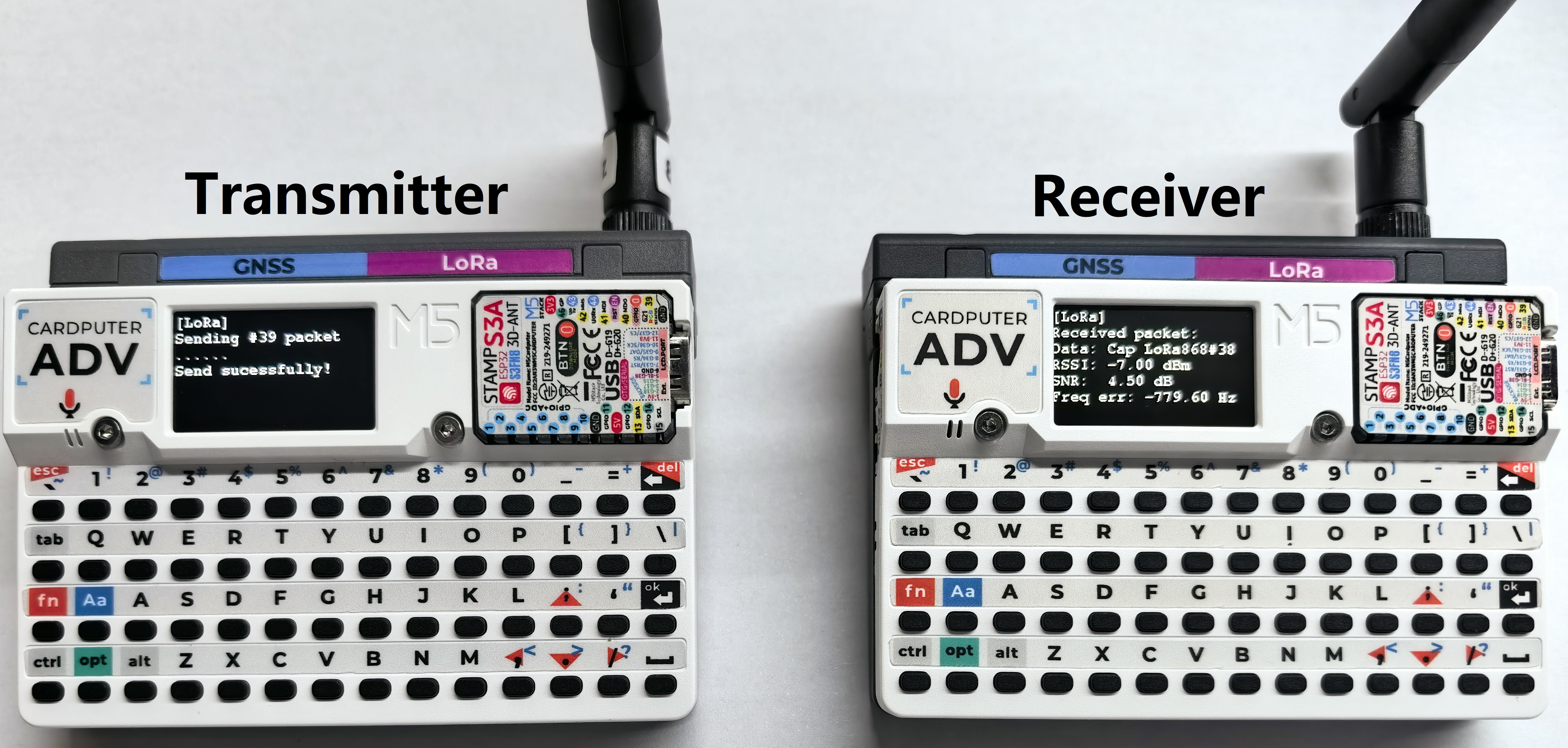
- Transmitter serial output:
[LoRa868] Sending #39 packet ... Transmission finished!- Receiver serial output:
[LoRa868] Received packet:
[LoRa868] Data: Cap LoRa868#38
[LoRa868] RSSI: -7.00 dBm
[LoRa868] SNR: 4.50 dB
[LoRa868] Frequency error: -779.60 Hz3.2 GPS Usage Example
- The GPS module of this device supports multiple satellite systems, including GPS, GLONASS, GALILEO, BDS, and QZSS. The example provides a function
setSatelliteMode()to modify the satellite system, with GLONASS as the default. When modified, the prefix displayed on the screen will also change accordingly to help identify the current satellite system.
#include "M5Unified.h"
#include "M5GFX.h"
#include "MultipleSatellite.h"
static const int RXPin = 15, TXPin = 13;
static const uint32_t GPSBaud = 115200;
MultipleSatellite gps(Serial1, GPSBaud, SERIAL_8N1, RXPin, TXPin);
// Variable to track current satellite system mode (default: GLONASS)
satellite_mode_t currentMode = SATELLITE_MODE_GLONASS;
// Function prototype for displaying information
void displayInfo(void);
/**
* Get the prefix string for different satellite systems
* @param mode Current satellite system mode
* @return Corresponding prefix string for the satellite system
*/
const char* getSatPrefix(satellite_mode_t mode) {
switch (mode) {
case SATELLITE_MODE_GPS: return "GPS_Sat"; // GPS satellite prefix
case SATELLITE_MODE_BDS: return "BDS_Sat"; // BeiDou satellite prefix
case SATELLITE_MODE_GLONASS: return "GLN_Sat"; // GLONASS satellite prefix
case SATELLITE_MODE_GALILEO: return "GAL_Sat"; // Galileo satellite prefix
case SATELLITE_MODE_QZSS: return "QZS_Sat"; // QZSS satellite prefix
default: return "Unknown"; // Default for unknown systems
}
}
void setup() {
M5.begin();
Serial.begin(115200);
M5.Display.setFont(&fonts::FreeMonoBold9pt7b);
gps.begin(); // Initialize GPS module
// Set GPS to factory start mode
gps.setSystemBootMode(BOOT_FACTORY_START);
// Print initialization information to serial monitor
Serial.println(F("<----------Cap LoRa868 Example---------->"));
Serial.print(F("Testing TinyGPSPlus library v. "));
Serial.println(TinyGPSPlus::libraryVersion());
String version = gps.getGNSSVersion();
Serial.printf("GNSS SW=%s\r\n", version.c_str());
delay(1000); // Short delay for initialization
gps.setSatelliteMode(currentMode);
displayInfo(); // Initial display of information
}
void loop() {
gps.updateGPS(); // Update GPS data
displayInfo(); // Update display with new data
delay(100);
}
void displayInfo(void) {
Serial.println("=========================================");
Serial.print(F("Location: "));
Serial.printf("satellites:%d\n", gps.satellites.value());
String gps_mode = gps.getSatelliteMode();
Serial.printf("GNSS Mode:%s\r\n", gps_mode.c_str());
// Get appropriate satellite prefix based on current mode
const char* satPrefix = getSatPrefix(currentMode);
// Check if location data has been updated
if (gps.location.isUpdated()) {
auto latitude = gps.location.lat();
auto longitude = gps.location.lng();
// Print latitude and longitude to serial with 6 decimal places
Serial.print(latitude, 6); Serial.print(F(","));
Serial.print(longitude, 6);Serial.print(F("\n"));
M5.Display.fillRect(0, 0, 240, 135, TFT_BLACK);
M5.Display.setCursor(0, 0);
M5.Display.printf("%s: \nSat: %d\nLat: %.6f\nlng: %.6f\n", satPrefix,
(uint8_t)gps.satellites.value(),
latitude,
longitude);
} else {
// If no valid location data, display placeholders
M5.Display.fillRect(0, 0, 240, 135, TFT_BLACK);
M5.Display.setCursor(0, 0);
M5.Display.printf("%s\n", satPrefix);
M5.Display.print("Sat: ----\nLat: ----\nLng: ----\n");
Serial.print(F("LOCATION INVALID\n")); // Indicate invalid data on serial
}
Serial.print(F("Date/Time: "));
// Check if date data has been updated
if (gps.date.isUpdated()) {
auto month = gps.date.month();
auto day = gps.date.day();
auto year = gps.date.year();
// Print date to serial (month/day/year)
Serial.printf("%d/%d/%d ", month, day, year);
M5.Display.fillRect(0, 80, 128, 128, TFT_BLACK);
M5.Display.setCursor(0, 80);
M5.Display.printf("Date: %d/%d/%d\n", month, day, year);
} else {
Serial.print(F("DATE INVALID")); // Indicate invalid date
}
// Check if time data has been updated
if (gps.time.isUpdated()) {
auto hour = gps.time.hour();
auto minute = gps.time.minute();
auto sec = gps.time.second();
auto centisec = gps.time.centisecond();
// Print time to serial with leading zeros where necessary (HH:MM:SS.CS)
if (hour < 10) Serial.print(F("0"));
Serial.print(hour);Serial.print(F(":"));
if (minute < 10) Serial.print(F("0"));
Serial.print(minute);Serial.print(F(":"));
if (sec < 10) Serial.print(F("0"));
Serial.print(sec);Serial.print(F("."));
if (centisec < 10) Serial.print(F("0"));
Serial.print(centisec);
M5.Display.fillRect(0, 128, 128, 60, TFT_BLACK);
M5.Display.setCursor(0, 96);
M5.Display.printf("Time: %02d:%02d:%02d.%02d\n", hour, minute, sec, centisec);
} else {
Serial.print(F("TIME INVALID")); // Indicate invalid time
}
Serial.println();
delay(1000); // Delay to stabilize display updates
}Since the GPS of this product uses a built-in antenna without an external one, please try to use it in open outdoor areas such as playgrounds or rooftops. The positioning wait time is relatively long, about a few minutes, so please be patient while the device searches for satellites and obtains coordinates.

- Serial output:
=========================================
Location: satellites:22
GNSS Mode:GLN_Sat
22.687541,113.772193
Date/Time: 9/5/2025 03:00:24.003.3 Using LoRa Communication to Transmit GPS Information
Transmitter
#include <M5Unified.h>
#include <RadioLib.h>
#include "utility/PI4IOE5V6408_Class.hpp"
#include "MultipleSatellite.h"
// LoRa configuration parameters
#define LORA_BW 125.0f // Bandwidth (kHz)
#define LORA_SF 12 // Spreading factor (6-12)
#define LORA_CR 5 // Coding rate (5-8)
#define LORA_FREQ 868.0 // Frequency (MHz)
#define LORA_SYNC_WORD 0x34 // Sync word
#define LORA_TX_POWER 16 // Transmission power (dBm)
#define LORA_PREAMBLE_LEN 20 // Preamble length
// LoRa pin definition
SX1262 radio = new Module(GPIO_NUM_5, GPIO_NUM_4, GPIO_NUM_3, GPIO_NUM_6);
// GPS configuration parameters
static const int RXPin = 15, TXPin = 13;
static const uint32_t GPSBaud = 115200;
MultipleSatellite gps(Serial1, GPSBaud, SERIAL_8N1, RXPin, TXPin);
// Global variables
int transmissionState = RADIOLIB_ERR_NONE;
volatile bool transmittedFlag = false;
int count = 0;
satellite_mode_t currentMode = SATELLITE_MODE_GLONASS;
float lastLat = 0.0f, lastLng = 0.0f;
int lastSatellites = 0;
String lastDate = "", lastTime = "";
// LoRa transmission completion callback function
#if defined(ESP8266) || defined(ESP32)
ICACHE_RAM_ATTR
#endif
void setFlag(void) {
transmittedFlag = true;
}
// Function to get satellite system prefix
const char* getSatPrefix(satellite_mode_t mode) {
switch (mode) {
case SATELLITE_MODE_GPS: return "GPS_Sat";
case SATELLITE_MODE_BDS: return "BDS_Sat";
case SATELLITE_MODE_GLONASS: return "GLN_Sat";
case SATELLITE_MODE_GALILEO: return "GAL_Sat";
case SATELLITE_MODE_QZSS: return "QZS_Sat";
default: return "Unknown";
}
}
// Function to update display information
String displayInfo(void) {
M5.Display.setTextColor(TFT_WHITE);
Serial.println("\n=========================================");
Serial.print(F("Location: "));
// Update satellite count
lastSatellites = gps.satellites.value();
Serial.printf("satellites:%d\n", lastSatellites);
String gps_mode = gps.getSatelliteMode();
Serial.printf("GNSS Mode:%s\r\n", gps_mode.c_str());
const char* satPrefix = getSatPrefix(currentMode);
// Update location information
if (gps.location.isUpdated()) {
lastLat = gps.location.lat();
lastLng = gps.location.lng();
Serial.print(lastLat, 6); Serial.print(F(","));
Serial.print(lastLng, 6);Serial.print(F("\n"));
// Display GPS information
M5.Display.fillRect(0, 0, 240, 135, TFT_BLACK);
M5.Display.setCursor(0, 0);
M5.Display.printf("%s: \nSat: %d\nLat: %.6f\nLng: %.6f\n",
satPrefix, lastSatellites, lastLat, lastLng);
} else {
M5.Display.fillRect(0, 0, 240, 135, TFT_BLACK);
M5.Display.setCursor(0, 0);
M5.Display.printf("%s\nSat: ----\nLat: ----\nLng: ----\n", satPrefix);
Serial.print(F("LOCATION INVALID\n"));
}
// Update date information
Serial.print(F("Date/Time: "));
if (gps.date.isUpdated()) {
lastDate = String(gps.date.month()) + "/" +
String(gps.date.day()) + "/" +
String(gps.date.year());
Serial.print(lastDate);
Serial.print(F(" "));
M5.Display.setCursor(0, 75);
M5.Display.printf("Date: %s\n", lastDate.c_str());
} else {
lastDate = "DATE INVALID";
Serial.print(F("DATE INVALID "));
}
// Update time information
if (gps.time.isUpdated()) {
lastTime = (gps.time.hour() < 10 ? "0" : "") + String(gps.time.hour()) + ":" +
(gps.time.minute() < 10 ? "0" : "") + String(gps.time.minute()) + ":" +
(gps.time.second() < 10 ? "0" : "") + String(gps.time.second()) + "." +
(gps.time.centisecond() < 10 ? "0" : "") + String(gps.time.centisecond());
Serial.print(lastTime);
M5.Display.printf("Time: %s\n", lastTime.c_str());
} else {
lastTime = "TIME INVALID";
Serial.print(F("TIME INVALID"));
}
Serial.println();
return String("Type:") + satPrefix +
" Count:" + String(count) +
" Sat:" + String(lastSatellites) +
" Lat:" + String(lastLat, 6) +
" Lng:" + String(lastLng, 6) +
" Date:" + lastDate +
" Time:" + lastTime;
}
String LoRaName;
m5::PI4IOE5V6408_Class ioe(0x43, 400000, &m5::In_I2C);
void setup() {
// Initialize M5 device
M5.begin();
Serial.begin(115200);
// Cap LoRa-1262 Detection
if (!m5::In_I2C.begin()) {
Serial.println("I2C init failed");
while (true) delay(1000);
}
if (ioe.begin()) {
Serial.printf("Using Cap LoRa-1262\n");
LoRaName = "LoRa-1262";
ioe.setDirection(0, true); // Output
ioe.setHighImpedance(0, false); // Disable high-impedance so pin can actually drive
ioe.digitalWrite(0, true); // High Level
} else {
Serial.printf("Using Cap LoRa868\n");
LoRaName = "LoRa868";
}
M5.Display.setFont(&fonts::FreeMonoBold9pt7b);
// Initialize LoRa module
Serial.printf("[%s] Initializing ...", LoRaName);
int state = radio.begin(LORA_FREQ, LORA_BW, LORA_SF, LORA_CR,
LORA_SYNC_WORD, LORA_TX_POWER, LORA_PREAMBLE_LEN, 3.0, true);
if (state == RADIOLIB_ERR_NONE) {
Serial.println(F("Init success!"));
} else {
Serial.print(F("Init failed, code: "));
Serial.println(state);
while (true) { delay(10); }
}
radio.setCurrentLimit(140);
radio.setPacketSentAction(setFlag);
// Send first data packet
Serial.printf("[%s] Sending first packet...", LoRaName);
transmissionState = radio.startTransmit("GPS Initializing...");
M5.Display.setCursor(5,0);
M5.Display.printf("GPS Initializing...\n");
// Initialize GPS module
gps.begin();
gps.setSystemBootMode(BOOT_FACTORY_START);
gps.setSatelliteMode(currentMode);
Serial.println(F("<----------Cap LoRa868/1262 Example---------->"));
Serial.print(F("Testing TinyGPSPlus library v. "));
Serial.println(TinyGPSPlus::libraryVersion());
String version = gps.getGNSSVersion();
Serial.printf("GNSS SW=%s\r\n", version.c_str());
delay(1000);
}
void loop() {
// Handle LoRa transmission completion event
if (transmittedFlag) {
transmittedFlag = false;
if (transmissionState == RADIOLIB_ERR_NONE) {
// Update GPS data and display
Serial.println(F(" Transmission finished!"));
M5.Display.setTextColor(TFT_GREEN);
M5.Display.println(" OK!");
} else {
Serial.print(F("Send failed, code: "));
Serial.println(transmissionState);
M5.Display.print("\nSend failed\ncode:");
M5.Display.println(transmissionState);
}
radio.finishTransmit();
// delay(500);
gps.updateGPS();
String gpsData = displayInfo();
// Send GPS data
Serial.printf("[%s] Sending GPS data:\n %s\n", LoRaName, gpsData.c_str());
transmissionState = radio.startTransmit(gpsData);
// Update display
M5.Display.fillRect(0, 115, 240, 20, TFT_BLACK);
M5.Display.setCursor(0,115);
M5.Display.setTextColor(TFT_YELLOW);
M5.Display.printf("Sending #%d... ", count++);
}
}Receiver
#include <M5Unified.h>
#include <RadioLib.h>
#include "utility/PI4IOE5V6408_Class.hpp"
#define LORA_BW 125.0f // LoRa bandwidth (kHz) - 125kHz is common for long-range
#define LORA_SF 12 // Spreading factor (6-12) - higher = longer range, slower data rate
#define LORA_CR 5 // Coding rate (5-8, represents 4/5 to 4/8) - higher = more error correction
#define LORA_FREQ 868.0 // Carrier frequency (MHz) - 868MHz is EU ISM band for LoRa
#define LORA_SYNC_WORD 0x34 // Sync word for packet recognition - must match between transmitter/receiver
#define LORA_TX_POWER 16 // Transmission power (dBm) - 22dBm is maximum
#define LORA_PREAMBLE_LEN 20 // Preamble length (symbols) - ensures receiver can detect packet start
// SX1262 PIN NSS, IRQ, RST, BUSY
SX1262 radio = new Module(GPIO_NUM_5, GPIO_NUM_4, GPIO_NUM_3, GPIO_NUM_6);
// Packet received flag
volatile bool receivedFlag = false;
#if defined(ESP8266) || defined(ESP32)
ICACHE_RAM_ATTR
#endif
// This function is called when a complete packet is received by the module
// IMPORTANT: This function MUST be 'void' type and MUST NOT have any arguments!
void setFlag(void)
{
receivedFlag = true;
}
String Type = "Unknown";
String Count = "--";
String Sat = "--";
String Lat = "--";
String Lng = "--";
String Date = "Invalid";
String Time = "Invalid";
void gpsInfoParse(String str) {
int pos = 0;
while (pos < str.length()) {
int newlinePos = str.indexOf(' ', pos);
if (newlinePos == -1) newlinePos = str.length();
String line = str.substring(pos, newlinePos);
pos = newlinePos + 1;
int fieldType = -1;
if (line.startsWith("Type:")) fieldType = 0;
else if (line.startsWith("Count:")) fieldType = 1;
else if (line.startsWith("Sat:")) fieldType = 2;
else if (line.startsWith("Lat:")) fieldType = 3;
else if (line.startsWith("Lng:")) fieldType = 4;
else if (line.startsWith("Date:")) fieldType = 5;
else if (line.startsWith("Time:")) fieldType = 6;
switch (fieldType) {
case 0: Type = line.substring(5); break;// Type
case 1: Count = line.substring(6); break; // Count
case 2: Sat = line.substring(4); break; // Sat
case 3: Lat = line.substring(4); break; // Lat
case 4: Lng = line.substring(4); break; // Lng
case 5: Date = line.substring(5); break; // Date
case 6: Time = line.substring(5); break; // Time
default: break;
}
}
}
String LoRaName;
m5::PI4IOE5V6408_Class ioe(0x43, 400000, &m5::In_I2C);
void setup()
{
M5.begin();
Serial.begin(115200);
// Cap LoRa-1262 Detection
if (!m5::In_I2C.begin()) {
Serial.println("I2C init failed");
while (true) delay(1000);
}
if (ioe.begin()) {
Serial.printf("Using Cap LoRa-1262\n");
LoRaName = "LoRa-1262";
ioe.setDirection(0, true); // Output
ioe.setHighImpedance(0, false); // Disable high-impedance so pin can actually drive
ioe.digitalWrite(0, true); // High Level
} else {
Serial.printf("Using Cap LoRa868\n");
LoRaName = "LoRa868";
}
M5.Display.setFont(&fonts::FreeMonoBold9pt7b);
// Init SX1262
Serial.printf("[%s] Initializing ...", LoRaName);
int state = radio.begin(LORA_FREQ, LORA_BW, LORA_SF, LORA_CR, LORA_SYNC_WORD, LORA_TX_POWER, LORA_PREAMBLE_LEN, 3.0, true);
if (state == RADIOLIB_ERR_NONE) {
Serial.println(F("Init success!"));
} else {
Serial.print(F("Init failed, code: "));
Serial.println(state);
while (true) { delay(10); }
}
radio.setCurrentLimit(140);// Current range: 0-140mA , step 2.5mA
// Register callback function after receiving packet successfully
radio.setPacketReceivedAction(setFlag);
// Start listening for LoRa packets
Serial.printf("[%s] Starting to listen ... ", LoRaName);
state = radio.startReceive();
if (state == RADIOLIB_ERR_NONE) {
Serial.println(F("Listen successfully!"));
} else {
Serial.print(F("Listen failed, code: "));
Serial.println(state);
while (true) { delay(10); }
}
// If needed, 'listen' mode can be disabled by calling any of the following methods:
// radio.standby()
// radio.sleep()
// radio.transmit();
// radio.receive();
// radio.scanChannel();
}
void loop()
{
if (receivedFlag) {
// reset flag
receivedFlag = false;
// Read received data as an Arduino String
String gpsDataStr;
int state = radio.readData(gpsDataStr);
if (state == RADIOLIB_ERR_NONE) {
gpsInfoParse(gpsDataStr);
// Packet was successfully received
Serial.printf("[%s] Received packet:\n", LoRaName);
M5.Display.clear();
// Data of the packet
Serial.printf("[%s] Data:\t\t", LoRaName);
Serial.println(gpsDataStr);
// RSSI (Received Signal Strength Indicator)
Serial.printf("[%s] RSSI:\t\t", LoRaName);
Serial.print(radio.getRSSI());
Serial.println(F(" dBm"));
// SNR (Signal-to-Noise Ratio)
Serial.printf("[%s] SNR:\t\t", LoRaName);
Serial.print(radio.getSNR());
Serial.println(F(" dB"));
// Frequency error
Serial.printf("[%s] Frequency error:\t", LoRaName);
Serial.print(radio.getFrequencyError());
Serial.println(F(" Hz"));
// Display GPS Information
M5.Display.setCursor(0,5);
M5.Display.setTextColor(TFT_BLUE);
M5.Display.printf("Received packet: ");
M5.Display.setTextColor(TFT_WHITE);
M5.Display.printf("#%s\n", Count);
M5.Display.setTextColor(TFT_YELLOW);
M5.Display.printf("Type: %s\n", Type);
M5.Display.printf("Sat: %s\n", Sat);
M5.Display.printf("Lat: %s\n", Lat);
M5.Display.printf("Lng: %s\n", Lng);
M5.Display.printf("Date: %s\n", Date);
M5.Display.printf("Time: %s\n", Time);
} else if (state == RADIOLIB_ERR_CRC_MISMATCH) {
// Packet was received, but is malformed
Serial.println(F("CRC error!"));
} else {
Serial.print(F("Receive failed, code: "));
Serial.println(state);
}
// radio.startReceive();
}
}Since the GPS of this product uses a built-in antenna without an external one, please try to use the sending device in open outdoor areas such as playgrounds or rooftops. For first-time use, the wait time is relatively long, about a few minutes, so please be patient while the device searches for satellites and obtains coordinates.
The result of a successful run of the above example is as follows:

- Transmitter serial output:
=========================================
Location: satellites:17
GNSS Mode:GLN_Sat
22.687502,113.772232
Date/Time: 9/5/2025 01:31:06.00
[LoRa868] Sending GPS data:
Type:GLN_Sat Count:120 Sat:17 Lat:22.687502 Lng:113.772232 Date:9/5/2025 Time:01:31:06.00
Transmission finished!- Receiver serial output:
[LoRa868] Received packet:
[LoRa868] Data: Type:GLN_Sat Count:120 Sat:17 Lat:22.687502 Lng:113.772232 Date:9/5/2025 Time:01:31:06.00
[LoRa868] RSSI: -2.00 dBm
[LoRa868] SNR: 6.50 dB
[LoRa868] Frequency error: -789.77 Hz