

Arduino入門
2. デバイス&サンプル
3. M5Unified
4. M5GFX
5. 拡張モジュール&サンプル
Unit
Atomic
Tab5
IoT
アクセサリー
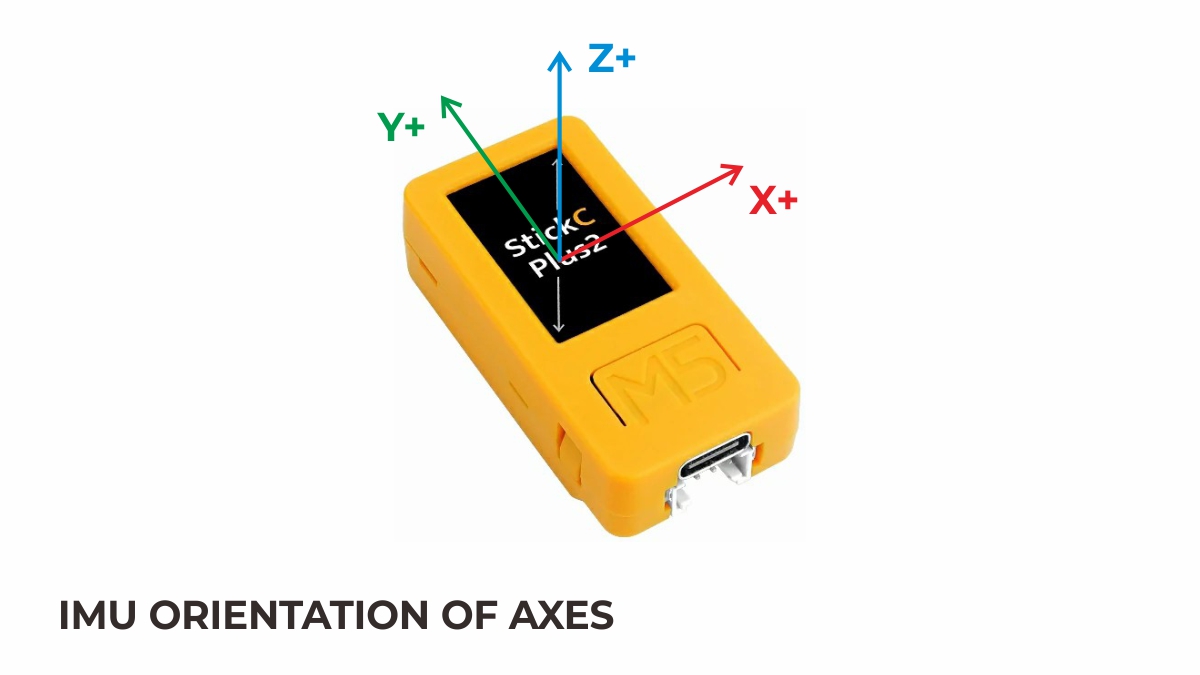
StickC-Plus2 IMU
M5StickCPlus2 IMU Attitude Sensor Input Related APIs and Case Programs.
Example
cpp
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47
#include "M5StickCPlus2.h"
void setup() {
auto cfg = M5.config();
StickCP2.begin(cfg);
StickCP2.Display.setRotation(1);
StickCP2.Display.setTextColor(GREEN);
StickCP2.Display.setTextDatum(middle_center);
StickCP2.Display.setFont(&fonts::FreeSansBold9pt7b);
StickCP2.Display.setTextSize(1);
}
void loop(void) {
auto imu_update = StickCP2.Imu.update();
if (imu_update) {
StickCP2.Display.setCursor(0, 40);
StickCP2.Display.clear(); // Delay 100ms 延迟100ms
auto data = StickCP2.Imu.getImuData();
// The data obtained by getImuData can be used as follows.
// data.accel.x; // accel x-axis value.
// data.accel.y; // accel y-axis value.
// data.accel.z; // accel z-axis value.
// data.accel.value; // accel 3values array [0]=x / [1]=y / [2]=z.
// data.gyro.x; // gyro x-axis value.
// data.gyro.y; // gyro y-axis value.
// data.gyro.z; // gyro z-axis value.
// data.gyro.value; // gyro 3values array [0]=x / [1]=y / [2]=z.
// data.value; // all sensor 9values array [0~2]=accel / [3~5]=gyro /
// // [6~8]=mag
Serial.printf("ax:%f ay:%f az:%f\r\n", data.accel.x, data.accel.y,
data.accel.z);
Serial.printf("gx:%f gy:%f gz:%f\r\n", data.gyro.x, data.gyro.y,
data.gyro.z);
StickCP2.Display.printf("IMU:\r\n");
StickCP2.Display.printf("%0.2f %0.2f %0.2f\r\n", data.accel.x,
data.accel.y, data.accel.z);
StickCP2.Display.printf("%0.2f %0.2f %0.2f\r\n", data.gyro.x,
data.gyro.y, data.gyro.z);
}
delay(100);
}API
M5StickCPlus2 library is implemented based on M5Unified library, the IMU part uses IMU_Class from M5Unified library, for more key related APIs you can refer to the following document:
IMU 三軸方向模式図
Page Tools