

Arduino 上手教程
2. 设备开发 & 案例程序
3. M5Unified
4. M5GFX
5. 拓展模块
Unit
Atomic
Tab5
IoT
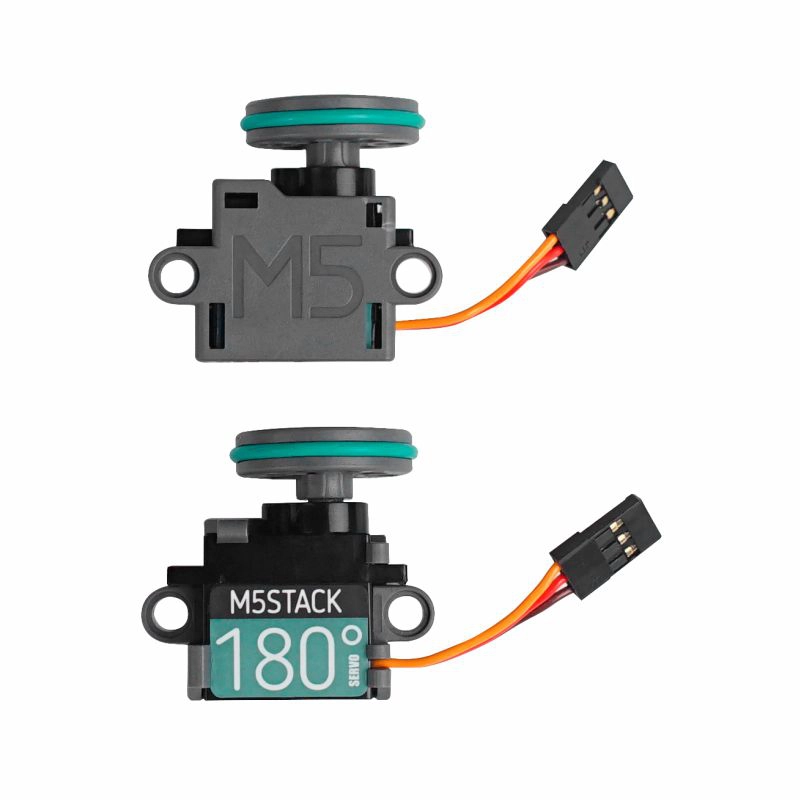
Servo Kit 180°/360° Arduino 使用教程
1. 准备工作
环境配置: 参考 Arduino IDE 上手教程完成 IDE 安装,并根据实际使用的开发板安装对应的板管理,与需要的驱动库。
使用到的驱动库:
使用到的硬件产品:


2. 案例程序
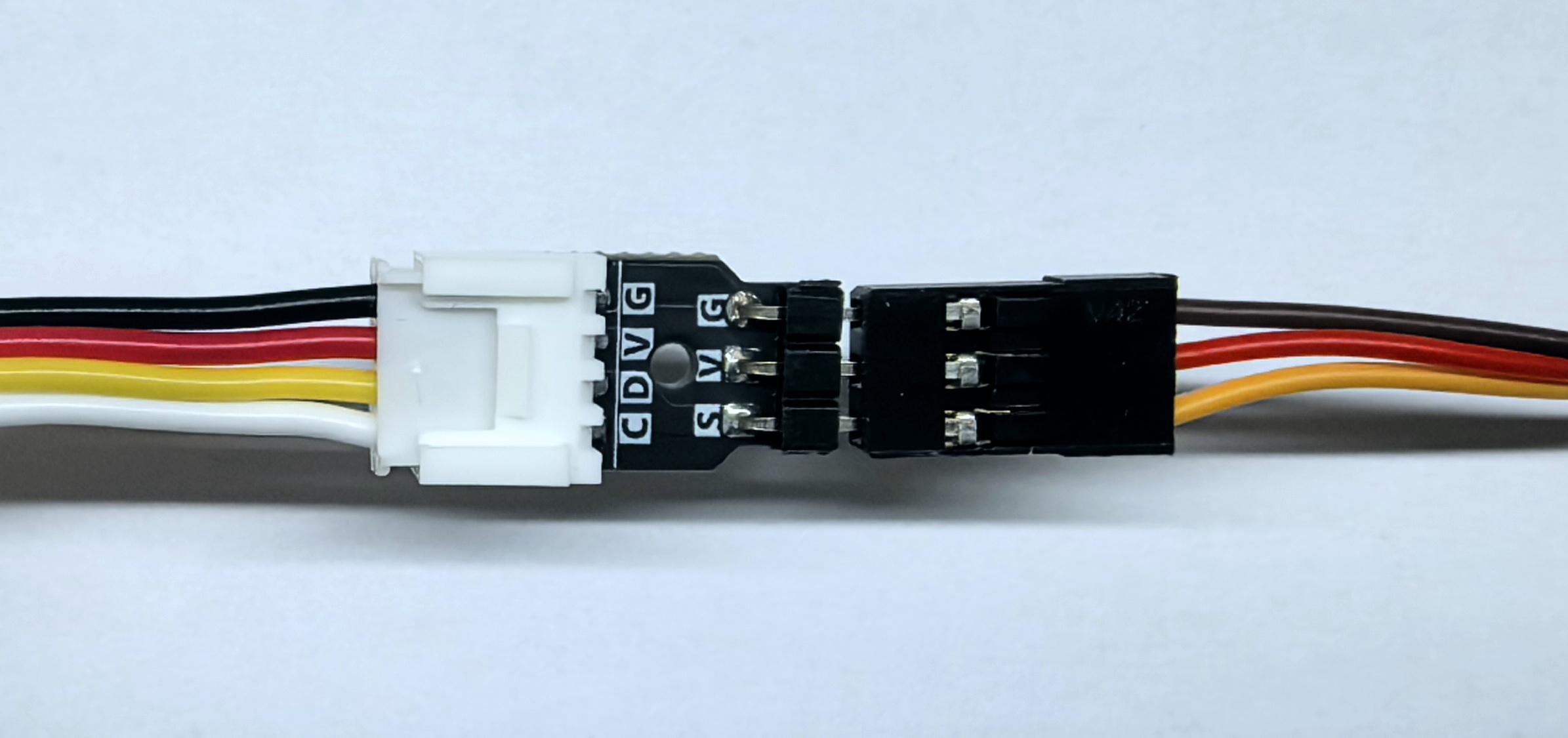
- 本教程中使用的主控设备为 CoreS3 ,搭配 Servo Kit 180°/360°。本舵机与主机之间需要通过转接头连接,连接方式如下图所示。根据实际的电路连接修改程序中的引脚定义,设备连接后对应的控制 IO 为
G2。
- 下方例程主要通过
writeMicroseconds函数控制舵机的转动位置,适用于 Servo Kit 180° 和 Servo Kit 360°。其中COUNT_LOW和COUNT_HIGH分别对应舵机的最小和最大脉冲宽度,STEP定义了脉冲宽度的增量步长,SERVO_PIN定义了连接舵机信号线的数字引脚。
对于 Servo Kit 180°,COUNT_LOW通常对应舵机的 0° 位置,COUNT_HIGH对应 180° 位置。使用writeMicroseconds函数后,舵机会根据传入的脉冲宽度值转动到相应的位置且维持在该位置,下方例程中servo.writeMicroseconds(1500)会使 Servo Kit 180° 转动到 90° 位置并保持。
对于 Servo Kit 360°,writeMicroseconds函数中传入的值控制舵机的旋转速度和方向,COUNT_LOW对应顺时针最大速度,COUNT_HIGH对应逆时针最大速度,而中间值则表示停止转动。COUNT_LOW ~ 中间值范围内为顺时针转动,数值越大舵机旋转速度越慢;中间值 ~ COUNT_HIGH范围内为逆时针转动,数值越大舵机旋转速度越快,下方例程中servo.writeMicroseconds(1500)会使 Servo Kit 360° 维持停止状态。
cpp
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29
#include "M5Unified.h"
#include "M5GFX.h"
#include "ESP32Servo.h"
// Macro definitions for servo control parameters
#define COUNT_LOW 500 // Minimum pulse width in microseconds (μs) for the servo (typically corresponds to 0° position)
#define COUNT_HIGH 2500 // Maximum pulse width in microseconds (μs) for the servo (typically corresponds to 180° position)
#define STEP 100 // Increment step for pulse width (controls how smoothly the servo moves between positions)
#define SERVO_PIN 2 // Digital pin connected to the servo motor's signal wire
Servo servo;
void setup() {
M5.begin();
servo.attach(SERVO_PIN, COUNT_LOW, COUNT_HIGH); // Attach the servo to the specified pin, with defined min (COUNT_LOW) and max (COUNT_HIGH) pulse widths
M5.Lcd.setFont(&fonts::FreeMonoBoldOblique12pt7b);
M5.Lcd.drawCenterString("SERVO", 160, 110);
}
void loop() {
servo.writeMicroseconds(500);
delay(2000);
servo.writeMicroseconds(1500); // 90° for 180° Kit, Stop for 360° Kit
delay(2000);
servo.writeMicroseconds(2500);
delay(2000);
servo.writeMicroseconds(1500); // 90° for 180° Kit, Stop for 360° Kit
delay(2000);
}3. 编译上传
1. 下载模式:不同设备进行程序烧录前需要下载模式,不同的主控设备该步骤可能有所不同。详情可参考Arduino IDE上手教程页面底部的设备程序下载教程列表,查看具体的操作方式。
CoreS3 长按复位按键 (大约 2 秒) 直到内部绿色 LED 灯亮起,便可松开,此时设备已进入下载模式,等待烧录。
.gif)
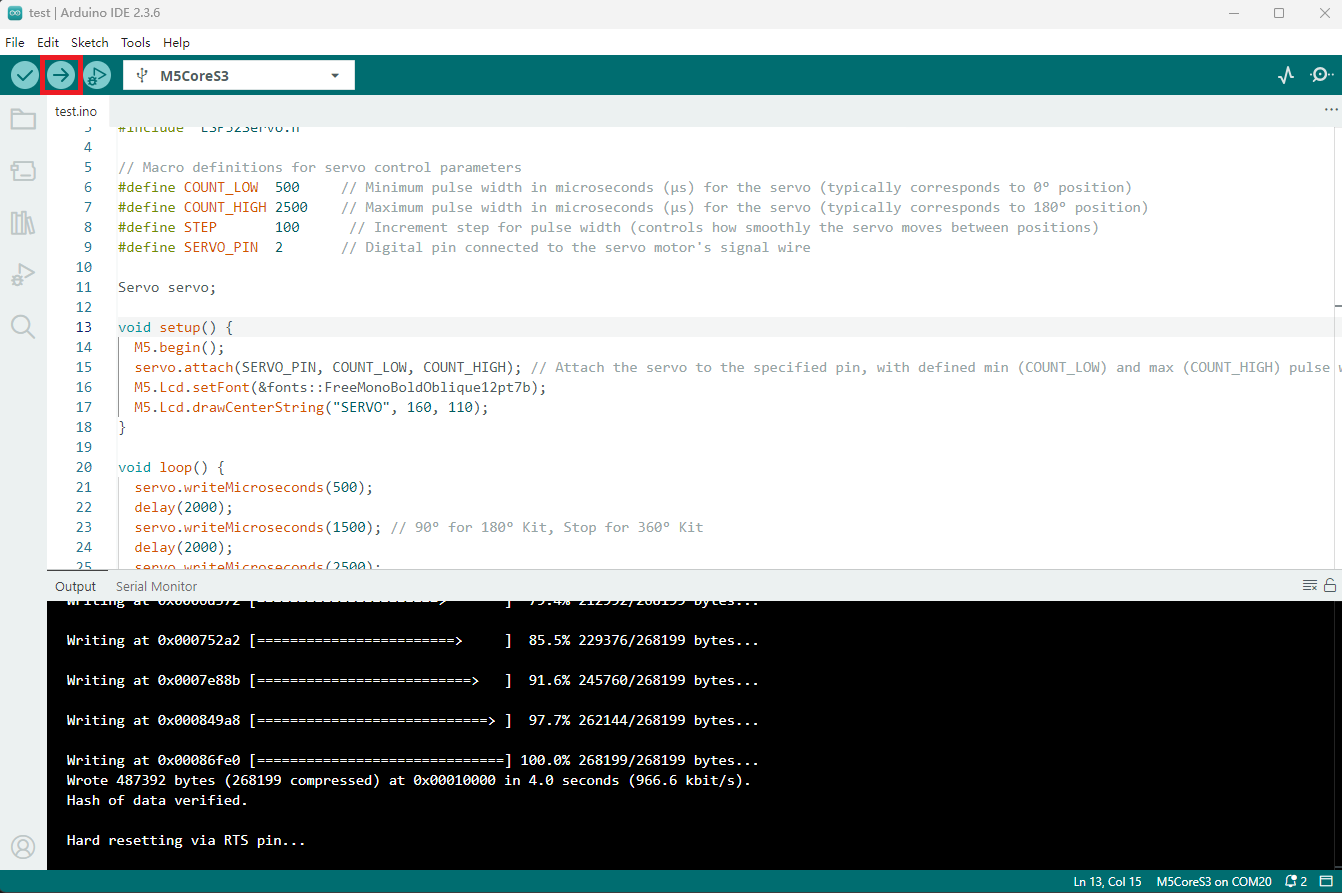
- 2. 选中设备端口,点击 Arduino IDE 左上角编译上传按钮,等待程序完成编译并上传至设备。
4. 舵机控制效果
注意
运行过程中请勿手动旋转舵机,以免损坏舵机电机。
- Servo Kit 180° 会依次转动到 0°、90°、180°、90° 位置并循环往复。
- Servo Kit 360° 会依次以最小速度逆时针转动、停止、以最小速度顺时针转动、停止并循环往复。
Page Tools