PRODUCTS
CORE
STICK
ATOM
STAMP
E-PAPER
SENSOR
DISPLAY
ACTUATORS
I-O
TRANSCEIVERS
HAT
ATOM-BASE
COREINK-BASE
WIRELESS
DRIVER
EXTENSION
BASE
FACE-PANELS
MEASURE
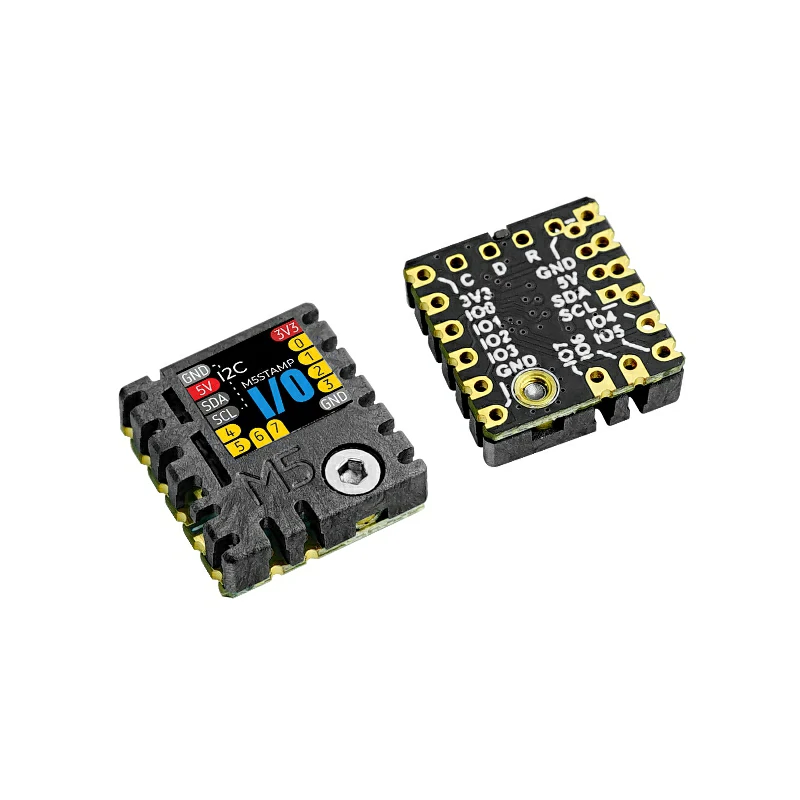
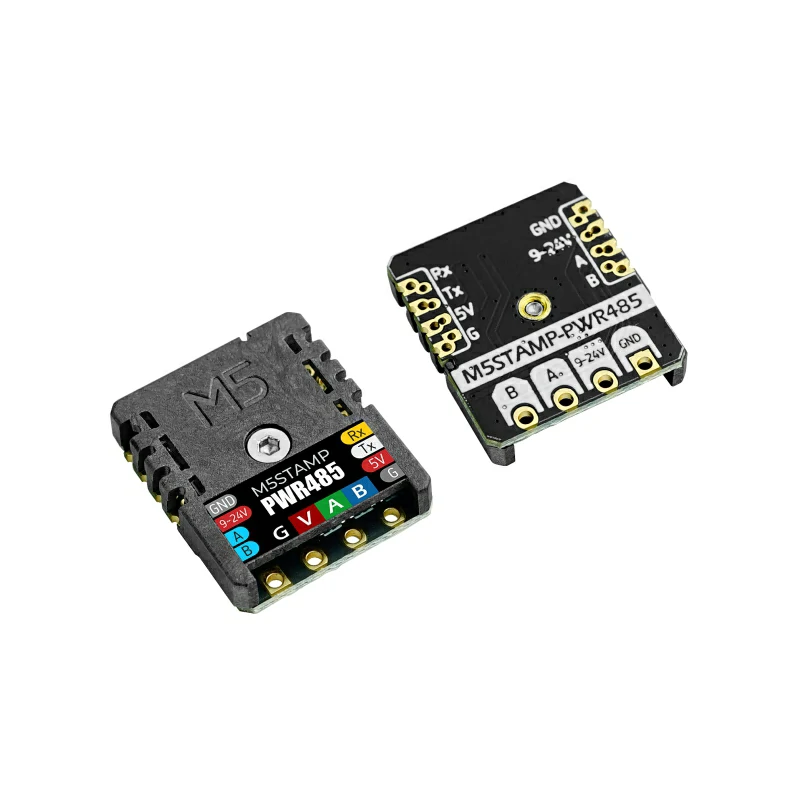
STAMP-MODULE
WI-FI-CAMERAS
AI-CAMERAS
POE-CAMERAS
KIT
HOBBY-KITS
SERVOS
CABLES
OTHER
ALUMINIUM
PRODUCT
PLATFORM
DOWNLOAD
FAQ
I2C TABLE
Search
CM4 ST7789V2 USB-C OTG ME1502 ID-KEY RJ45 I2C
ESP32-S3 OTG LTR-553ALS-WA AXP2101 DINBASE
ESP32 LCD TOUCH PSRAM AXP192 MPU6886 BM8563
ESP32 LCD TOUCH PSRAM ATECC608 AXP192 MPU6886
WATERPROOF LCD TOUCH RS485 AXP192 MPU6886
ESP32 LCD RTC INA3221 MPU6886 AXP192 SY8303
ESP32 LCD RTC INA3221 PWR485 AXP192 SY8303
ESP32 LCD TFCARD IP5306 ILI9342C
LCD ILI9342C SPK TFCARD IP5306 ESP32-D0WDQ6-V3 CH9102F
ESP32 LCD TFCARD MPU6886 BMM150
ESP32 LCD PSRAM MPU6886 BMM150 SPK
ESP32 LCD TFCARD MPU6886 BMM150 SPK
ESP32 LCD TFCARD MPU6886 SK6812 SPK
ESP32-D0WDQ6-V3 LCD ILI9342C TFCARD IP5306 SPK CH9102F
CAPSULE M5CAPSULE STAMPS3 BMI270 RTC8563 TF IR SPM1423
DIAL STAMPS3 S3 1.28 TFT TOUCH ESP32S3 ROTARY BUZZER BATTERY RFID NFC
CARD CARDPUTER ST7789 1.14 STAMPS3 KEYBOARD SPM1423 SD
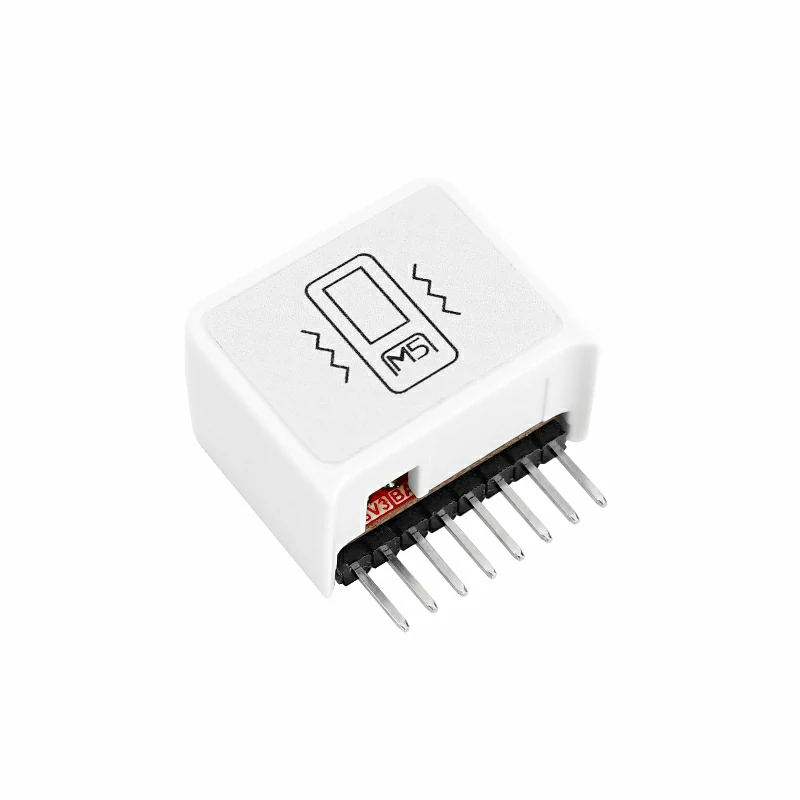
ESP32-DOWDQ6-V3 AXP2101 BM8563 MPU6886 NS4168 SPM1423 LCD ILI9342C CH9102F TOUCH VIBRATION
SEN55 SCD40 PM PM2.5 CO2 EZDATA INK RTC VOC TEM HUM
DIN METER DINMETER S3 STAMPS3 STAMP RTC
NANO C6 ESP32 ESP32C6 WIFI ZIGBEE MATTER
CORE LINUX STM32MP135 CAN RS485 OTG NS4168 AXP2101 SDRAM SD DIN RTC
ESP32 LCD IR AXP192 MPU6886 BM8563
ESP32 LCD FLIR3.0 AXP192 MPU6886 BM8563
ESP32-PICO-V3-02 IMU RTC MPU6886 MIC BUZZER SPM1423 IR LCD
ESP32 WIFI RGB LED IR BUTTON SK6812
ESP32 WIFI RGB LED MPU6886 BUTTON IR SK6812
ESP32 WIFI MIC LED MICROPHONE SPM1423 USB TYPEA IR
ESP32 LED IR SK6812 SPEAKER BUTTON
ATOMS3 ESP32S3 IR MPU6886 BUTTON LCD
ESP32S3 WIFI RGB LED IR BUTTON WS2812
ESP32S3 PDM WIFI MIC SPM1423 USBA
ESP32 LED@RGB BUTTON
ESP32 LED@RGB BUTTON IOX14
ESP32 LED@RGB BUTTON CH9102 IOX13
ESP32S3 WIFI RGB LED BUTTON WS2812
ESP32S3 WIFI RGB LED BUTTON WS2812 1.27 2.54
ESP32 E-PAPER BM8563 LED BUZZER
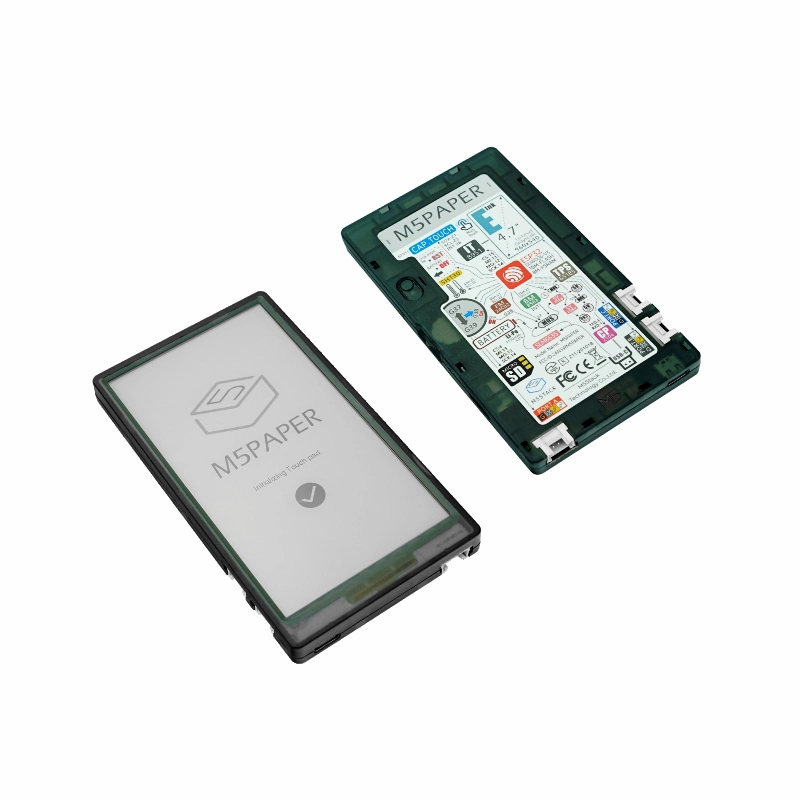
ESP32 E-PAPER TOUCH BM8563 SHT30 FM24C02
DISTANCE SONIC RCWL-9600 I2C SENSOR
DISTANCE SONIC RCWL-9620 I2C SENSOR
DISTANCE SONIC RCWL-9620 GPIO SENSOR
LASER DISTANCE MEASURE I2C VL53L0X SENSOR
TRAVEL SWITCH GPIO
PIR HUMAN MOTION GPIO SENSOR
LIMIT SWITCH ITR9606 GPIO SENSOR PHOTOELECTRIC
LIMIT SWITCH ITR9606 SENSOR
WEIGHT GPIO HX711 SENSOR
SCALES HX711 STM32 I2C
GESTURE I2C PAJ7620U2 SENSOR
COLOR RECOGNITION TCS3472 I2C SENSOR
INFRARED IMAGING MEASURE MLX90640 I2C SENSOR
INTENSITY LM393 ANALOG DIGITAL GPIO SENSOR
DIGITAL AMBIENT LIGHT I2C SENSOR BH1750FVI
CLOCK I2C SENSOR RTC8563 HYM8563 BMM8563
CURRENT METER I2C SENSOR ADS1115
VOLTAGE METER I2C ADS1115 16-BIT ADC
K-TYPE THERMOCOUPLE MAX31855KASA+T I2C
INFRARED TEMP MEASURE MLX90614 I2C
O2 HEART RATE MEASURE MAX30100 I2C
FINGERPRINT RECOGNITION FPC1020A UART
SECURE KEY STORAGE ATECC608B I2C
6-AXIS ATTITUDE MPU6886 I2C
3-AXIS ACCELEROMETER ADXL345 I2C
ENVIRONMENTAL MONITOR SHT30 BMP280 I2C
ENVIRONMENTAL MONITOR SHT30 QMP6988 I2C
ENVIRONMENTAL TEMPERATURE HUMIDITY MOISTURE PRESSURE SHT40 BMP280 I2C ENVIV
BME688 ENVIRONMENTAL TEMPERATURE HUMIDITY IAQ VOC PRESSURE I2C
CO2 MONITOR SCD40 I2C
MULTI-PIXEL GAS SENSOR SGP30 I2C
SOIL MOISTURE MEASURE ANALOG&DIGITAL OUTPUT
MOISTURE REGULATION CAPACITIVE PROBES GPIO
AIR PRESSURE MCP-H10-B200KPPN
BAROMETRIC PRESSURE BMP280 I2C
HALL SENSOR SWITCHES A3144E GPIO
SOUND SENSOR GPIO LM393 MAX4466
PDM MICROPHONE I2S
PASSIVE BUZZER GPIO
ANALOG/DIGITAL CONVERTE ADS1100 16-BIT I2C
D/A CONVERT MCP4725 I2C
MLX90640 ESP32 I2C THERMAL TEMPERATURE ALARM
MLX90614 STM32 I2C TEMPERATURE ALARM NCIR
BAROMETRIC PRESSURE TEMPERATURE HEIGHT TESTING QMP6988 I2C SENSOR AIR PRESSURE
ENVIRONMENTAL TEMPERATURE HUMIDITY MOISTURE I2C SCD41
TEMP METER I2C SENSOR UNIT STM32F030 MAX31855 CA-IS3641HW
STM32G030F6 4-20MA MODULE AIN HCNR200
AC MEASURE UNIT SENSOR CURRENT VOLTAGE ISOLATED HJW8032
IMU BMP280 BMI270 BMM150 MINI PRO DOF 10 PRESSURE GYRO ACCELERATED
TOF 4M TOF4M VL53L1CXV0FY/1 I2C LASER DISTANCE SENSOR
IR TRACKING LINE FLLOWER REFLECTIVE UNIT ANALOG DIGITAL SENSOR
MINI SCALE HX711 STM32 I2C
CAN TJA1051T MINI
WEIGHT UNIT I2C HX711 STM32
1.3-INCH B&W OLED SH1107 I2C
1.14" COLOR LCD ST7789V2 I2C
DIGITAL TUBE STM32F030 TM1637
TRANSPARENT OLED 1.54 STM32F030F4P6 I2C SSD1309 BUZZER 12864
MINIOLED 0.42 UNIT OLED I2C
TRANSPARENT OLED 1.54 I2C SSD1309 12864
UNIDIRECTIONAL VIBRATION MOTORS
UNIDIRECTIONAL DC MOTORS
RGB LED@3 SK6812 GPIO
LIGHT STRIPS IP65 WATERPROOF
LIGHT STRIPS PROGRAMMABLE
RGB LED LIGHT PANELS
FLASHLIGHT GPIO PORTB AW3641EDNR
HBRIDGE STM32F030F4P6 RZ7899 DC MOTOR
WS2812C 2020 RGB NECO UNIT
STM32F030F4 MOTOR SERVO I2C CONTROLLER DRIVER UNIT
HBRIDGE STM32F030F4P6 RZ7899 DC MOTOR CURRENT INA199A
QR CODE I2C UART SCAN STM32
SYNTH MIDI AT SERIAL PIANO MUSIC SPEAKER
BLDC STM32 DRV11873PWPR DRIVER MOTOR
4-WAY RELAY I2C AC-250V/DC-28V
2-WAY RELAY GPIO AC-250V/DC-28V
RELAY GPIO AC-220V/DC-30V
SOLID-STATE RELAYS AC-250V/DC-5V
SINGLE PHASE SOLID STATE RELAYS
SIGNAL GENERATORS AD9833 I2C
GPIO EXPANDER PCA9554PW I2C
IO EXPANDER STM32F030 I2C
EXTENDED CONTROL MEASURE GPIO
INTERFACE EXPANSION
I2C SPLITTER TCA9548A I2C
I2C SPLITTER PCA9548AP I2C
GPIO EXPANDER MEGA328 I2C
GPIO EXPANDER STM32F030 I2C
INTERFACE CONVERTER TO HT3.96
TYPEC TO GROVE POWER
THREE-AXIS INPUT MEGA8A I2C
ROTARY POTENTIOMETERS GPIO
ROTARY POTENTIOMETERS 30BIT PLUSE I2C
SLIDE POTENTIOMETERS SK6812 GPIO
MECHANICAL KEYS GREEN SHAFT
SINGLE BUTTON
DOUBLE BUTTON
QWERTY KEYBOARD ATMEGA8A I2C
QWERTY KEYBOARD MEGA328P I2C
COMMUNICATION TRANSFER WITH MICRO:BIT
UNIVERSAL BOARD FREE DESIGN
ANGLE ADJUSTABLE POTENTIOMETER I2C 8CH UNIT
ENCODER I2C STM32F030 8CH
RCA A/V COMPOSITE VIDEO OR AUDIO
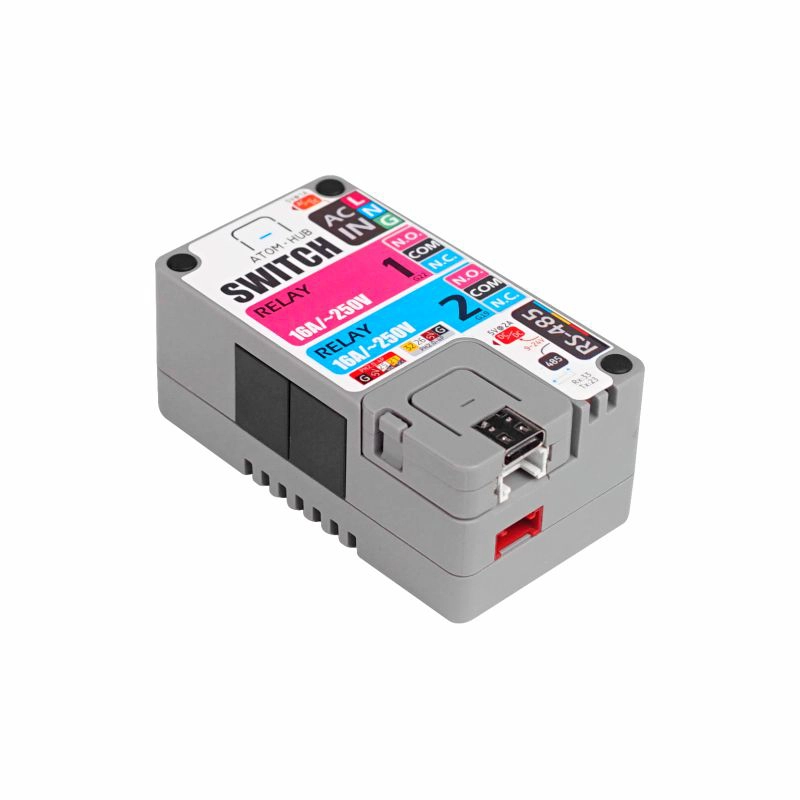
SWITCH MODBUS I2C RS485PWR RELAY DC
ENCODE STM32
M5STAMPS3 BREAKOUT STAMP S3 1.27 2.54
ADC RATE ADS1110 ANALOG DIGITAL
DAC UNIT DIGITAL ANALOG GP8413
LORAWAN 915MHZ ASR6501 UART
LORAWAN 868MHZ ASR6501 UART
LORAWAN 470MHZ ASR6501 UART
CATM NB-IOT SIM7080G UART
GLOBAL NB-IOT SIM7020G UART
CHINA NB-IOT SIM7020C UART
ZIGBEE COMMUNICATION CC2630 UART
MQTT COMMUNICATION W5500 UART
MQTT POE W5500 UART
DUAL-MODE COMMUNICATION GNSS LOCATION
ETHERNET CONTROLLER ESP32 POE
IR T/R GPIO
RF TRANSMITTERS SYN115 GPIO
RF RECEIVERS SYN531R GPIO
SATELLITE POSITION AT6558 UART
LEVEL CONVERTOR SP485EEN UART
ISOLATED RS485 CA-IS3082W UART
CAN BUS R/T CA-IS3050G
RADIO FREQUENCY MFRC522 I2C
RADIO FREQUENCY WS1850S I2C
RADIO FREQUENCY JRD-4035 UART
LASER RECEIVER GPIO
LASER EMITTER GPIO
INDOOR POSITION DW1000 UART
LORA E220 920MHZ COMMUNICATION SERIAL UART
O2 HEART RATE MEASURE MAX30102 I2C
HUMAN BODY INFRARED HUMAN MOTION GPIO
LASER DISTANCE MEASURE VL53L0X I2C
AMBIENT LIGHT I2C BH1750FVI 16-BIT ADC
INFRARED IMAGING MLX90640 I2C
ENVIRONMENTAL MONITOR SHT30 BMP280 BMM150
SPEAKER PAM8303
ANALOG/DIGITAL CONVERTER ADS1100 16-BIT I2C
THREE-AXIS INPUT STM32F030F4 I2C
FINGERPRINT RECOGNITION FPC1020SC UART
SERVO MOTORS ES9251II
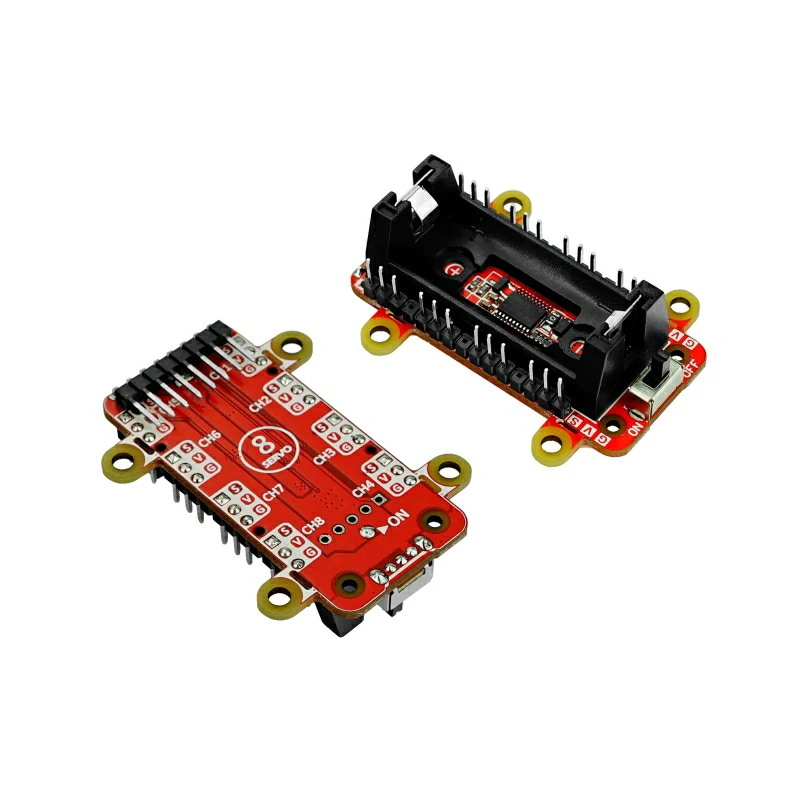
8-SERVO DRIVER STM32F030F4 I2C
4-SERVO DRIVER STM32F030F4P6 I2C
RECHARGEABLE BATTERY HOLDER
THREE-AXIS INPUT@2 STM32F030F4 I2C
RECHARGEABLE 16340 BATTERY
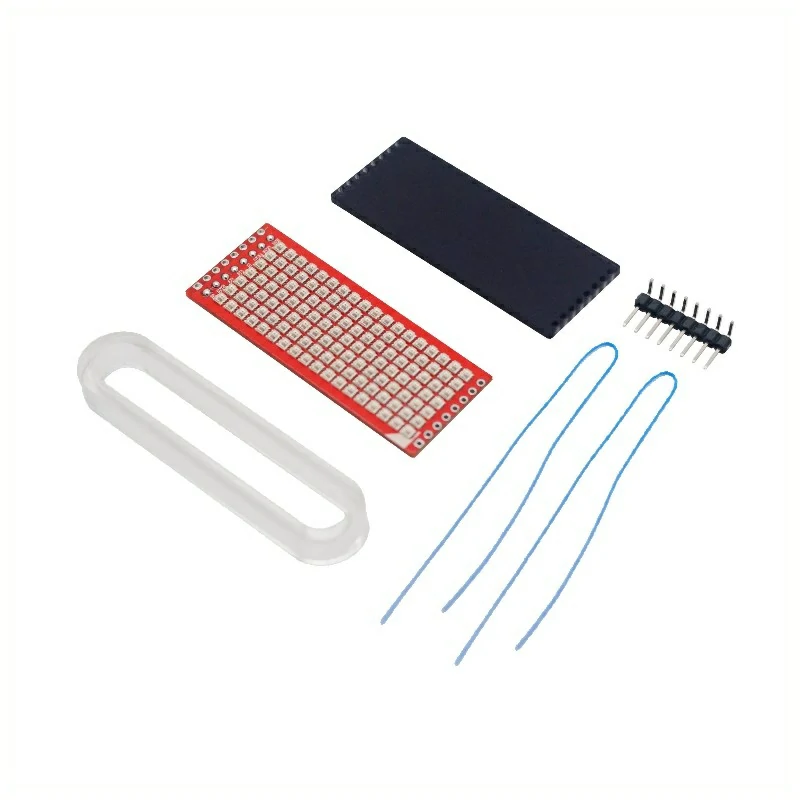
MATRIX RGB WS2812
SIM7020G NB-IOT NETWORK COMMUCATION SERIAL UART
ROTARY I2C HAT STM32F030 SENSOR
STM32F030 HAT SK6812
DC MOTOR VIBRATOR HAT
MAX98357 SPEAKER HAT
DAC HAT DIGITAL ANALOG
CHINA LET-CAT1 RS485 SIMA7680C
NB-IOT RS485 SIM7020G UART
NB-IOT RS485 SIM7020C UART
ETHERNET CONTROL POE W5500
DISPLAY DRIVERS FPGA HDMI
LEVEL CONVERTOR SP3485EE UART
TTL-RS232 MAX232 A0Z1282CI
TWO-WAY SWITCH SP485EE RS485
LEVEL CONVERTOR SP485EEN
STEPMOTOR DRIVER DRV8825 GPIO
MOTOR DRIVER DRV8876 ADC
ADJUST DC DRIVER EG27324 MOSFET
SERVO & MOTOR DRIVER RZ7899 ETA9740 STM32
QR CODE CMOS UART/TTL
SATELLITE POSITION M8030-KT UART
EXTERNAL STORAGE
AUDIO PLAYBACK
EXTERNAL BATTERY IP5303
EXPANSION BOARD FREE DESIGN
EXTENSION KITS
SMART SOCKET HLW8032 UART
THERMAL PRINTER ESP32 AP+MQTT
QR CODE SCAN TTL-232
ATOM PORTA PORTB PORTC I2C UART ADC
QR CODE SACN TTL ATOM
TTL RS485 CONVERTOR SP3485EE A0Z1282CI UART
ATOM RS232 MAX232 A0Z1282CI CONVERTER
SPK SPEAKER NS4168 TFCARD SD ATOMIC
ATOM STEPMOTOR DRIVER DRV8825
ATOM TF TFCARD EXTERNAL STORAGE FILE SD SDCARD
CAN BUS CA-IS3050G RECEIVER TRANSMITTER
MOSFET DC MOTOR DRIVER FDD8447L EG27324 PWM ATOM ATOMIC
ETHERNET CONTROL POE W5500 TCP ATOM ATOMIC
M8083-KT GPS TF LOCATION POSITION SATELLITE GNSS UART ATOM ATOMIC
HD BRIDGE MOTOR DRIVER DRV8876
SERVO MOTOR ATOM BATTERY
SATELLITE POSITION M8N UART
2G COMMUNICATION SIM800C UART
LORAWAN EU868MHZ ASR6501 UART
LORAWAN CN470MHZ ASR6501 UART
LTE COMMUNICATION SIM7600G UART
LTE COMMUNICATION A7600C1 UART
LORAWAN 433MHZ SX1278 SPI
LORAWAN 868MHZ SX1276 SPI
SATELLITE POSITION NEO-M8N UART
2G COMMUNICATION SIM800L UART
COMM CONVERT MCP2515 SP3485
M2M COMMUNICATION M6315 UART
CHINA NB-IOT M5311LV UART
GNSS GPS NEO LOCATION POSITION SATELLITE UART I2C BMI270 BMM150 BMP280 M9N
W5500 EHTERNET NETWORK RJ45 LAN
868MHZ LORA MODULE SMA
STEPMOTOR DRIVE DRV8825PWPR I2C
STEPMOTOR DRIVE HR8825 GPIO+I2C
STEPMOTOR DRIVE DRV8825 UART+I2C
SERVO DRIVE DRV8301 UART
SERVO DRIVE PCA9685 I2C
STEPMOTOR DRIVE LM2596SX I2C
DCMOTOR DRIVE L293DD I2C
MECHANICAL RELAY@4 STM32F030F4 I2C
SWITCH & PASSIVE I/O STM32F030 I2C
MECHANICAL FAN
RELAY STM32 I2C AC RELAY
DMX BASE RS485 XLR
HR8825 STEPMOTOR DIRVER PWR485 RS485 DC STM32 STM32F030F4P6
REALY STM32F030F4 DC I2C 1N4148WS AOZ1282CI
GROVE EXPANSION
MOTOR & SERVO DRIVER DRV8833 I2C
FUNCTIONAL ENHANCE MEGA328 I2C
LI-ION BATTERIES 750 MAH
LI-ION BATTERIES 1500 MAH
USB DRIVE MAX3421E SPI
I/V MEASUREMENT FREE DESIGN
BUS EXPANSION FREE DESIGN
RCA A/V COMPOSITE VIDEO AND AUDIO
GW1NR LT8618SXB HDMI
RS232 FEMALE DB9 UART F0505S-2WR3 TD301D232H TTL
RS232 MALE DB9 UART F0505S-2WR3 TD301D232H TTL
HMI MODULE ENCODER STM32F030F4P6
MAX3421E SPI DRIVER USB MODULE
MODULE ENCODER 4 STM32F030C8T6 I2C
PPS POWER MODULE STM32 AD8418 STEP-DOWN DC
CATM NB-IOT SIM7080G PWR485
THERMAL IMAGING MLX90640 SIM7080G
POE ETHERNET W5500 UART
ETHERNET RS485 W5500 UART
ETHERNET RS485/RS232 W5500 SPI
TEMPERATURE & HUMIDITY BASE I2C
INDUSTRIAL CONTROL
UNIVERSAL BOARD FREE DESIGN RS485
AC 100 ~ 230V TO DC 5V/12V
BASIC BATTERY BASE
ENHANCED BATTERY BASE MIC LED BAR
ENHANCED BATTERY BASE MPU6886 MIC LED
DRY BATTERIES DC-DC POWER SUPPLY
CHARGING BASE
UNIVERSAL HOLE PROTOTYPE TTL RS485 PWR485 DIY 2.54 DCDC M12 SMA BASE 26 DIN DIN-RAIL
UNIVERSAL HOLE PROTOTYPE BASE DCDC DIY 2.54 DIN-RAIL DIN
RS485 TTL" DC
DINBASE BATTERY DIY BASE
POWER SUPPLY M5 GO M5GO LI LIPO BATTERY BOTTOM IR TP4057 WS2812
BOTTOM BASIC BLACK CORE
ROTARY ENCODER MEGA328 I2C
FACES JOYSTICK MEGA328 I2C
RADIO FREQUENCY IDENTIFICATION I2C
MULTI-FUNCTIONAL EXPANSION LIPO
MULTI-FUNCTIONAL EXPANSION LIPO GROVE
QWERTY KEYBOARD MEGA328 I2C
CALCULATOR KEYBOARD MEGA328 I2C
GAME KEYBOARD MEGA328 I2C
PORTABLE ECG AD8232 UART
TEMP MODULE I2C SENSOR UNIT STM32F030 MAX31855 CA-IS3020S
4-20MA STM32G030F6 MODULE AIN HCNR200
ENVIRONMENTAL PM2.5 PMSA003 I2C AIR QUALITY
GPIO EXPANER STM32F030 I2C
RS485 COMMUNICATION SP485EEN UART
CHINA LET-CAT1 SIMA7680C AT
ISP DOWNLOADER UART USB ESP-TOOLS M5BURNER STAMP
LOW POWER CONSUMPTION STAMP BM8563 I2C RTC WAKE SLEEP 5V CHARGE
WIFI CAMERA ESP32+OV2640
DIY WIFI CAMERA ESP32+OV2640
LOW-POWER CAMERA ESP32+OV3660
WIFI CAMERA(FISHEYE) ESP32+OV2640
CAMERA BATTERY BASE
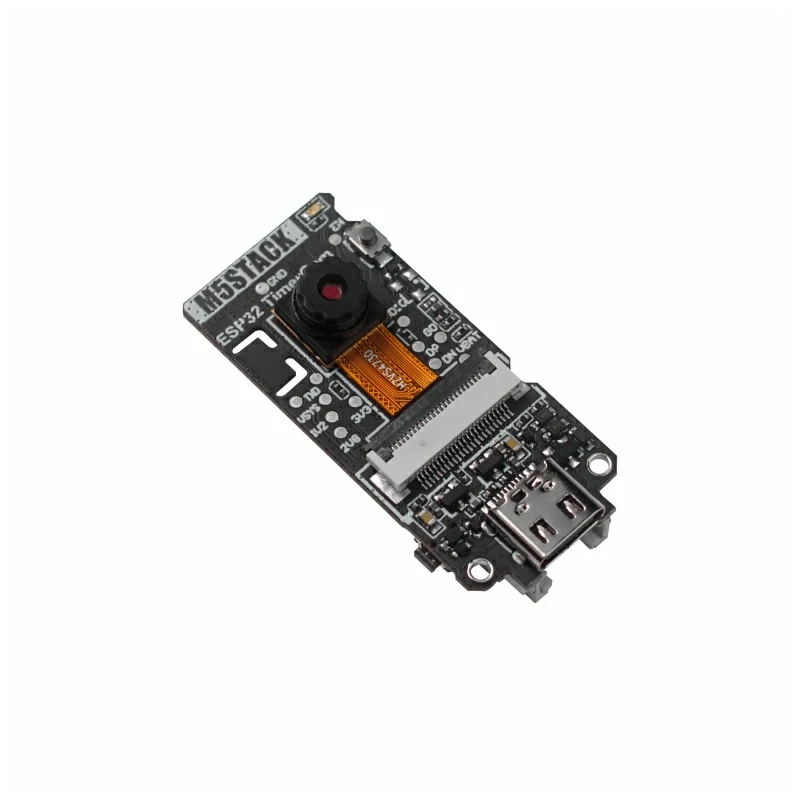
ESP32 CAM
ESP32S3 2MEGAPIXEL OV2640 UART EADATA CAMERA CAM 200W WIFI
AI RECOGNITION SIGMSTAR SSD202D(GC2145)
AI RECOGNITION SIGMSTAR SSD202D(GC2053)
AI RECOGNITION SIGMSTAR SSD202D
AI VISION KENDRYTE K210(OV2640)
AI VISION KENDRYTE K210(OV7740)
AI CAMERA KENDRYTE K210(OV7740)
KENDRYTE RISC AI M12 K120 CAMERA TFCARD BUTTON RECONGNITION CNC MACHING LEARNING UIFLOW
PROGRAMMABLE WEBCAMS ESP32 OV2640
POE CAMERA ESP32 WIFI
LIDAR TROLLEY
MULTIFUNCTIONAL DEVELOPMENT BOARD
ELECTRONIC WEIGHING HX711 GPIO 24 BITS A/D
MOTION CONTROL
ENVIRONMENTAL MONITOR SHT20 PMSA003 I2C
2-WAY RELAY GPIO AC-250V/DC-24V
ENVIRONMENTAL TEMPERATURE HUMIDITY MOISTURE SHT30 PMSA003 I2C AIR QUALITY
ESP32-PICO-D4 LCD IMU MPU6886 AXP192 MIC APM1423 BUZZER INFRARED IMAGING MEASURE MLX90640 I2C SENSOR
BALANCE CAR STM32F030C8T6 MOTOR
BALANCE CAR STM32F030F4P6 MOTOR
OMNI-DIRECTIONAL MOBILE TROLLEY
TOUCHPAD PIANO TS20 I2C
ENVIRONMENTAL COLLECTION SHT20 BMP280 I2C
BOUNCING ROBOT
BUG BUGC BUGC2 C2 STICKC SITCKCPLUS2 MOTOR ROBOT IR L9110S
MECHANICAL GRIPPER SG92R PWM
SG90 SERVO
GROVE CABLE
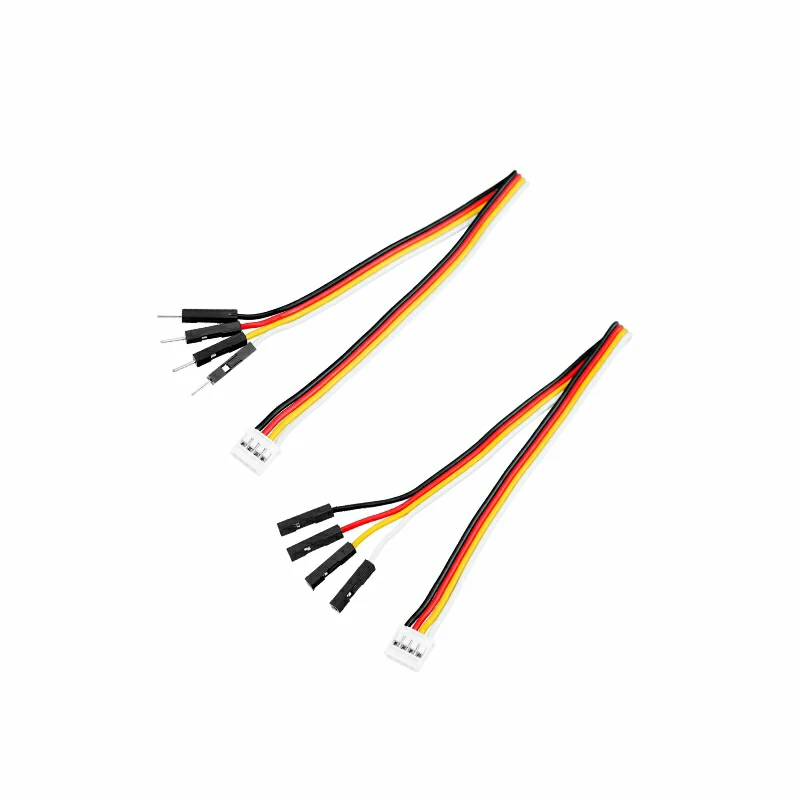
GROVE TO DUPONT
SHIELDED TWISTED PAIR
GROVE EXTENSION
CONNECTION TERMINALS
LEGO MOTOR CABLE
POE SPLITTER LAN RJ45
TYPEC GROVE UNIT CONNECTOR PIN EXTENDION EXPANDER
MAGNETIC TYPEC USB WIRE
VOLTAGE DROP DC/DC ME3116AM6G
GUIDE RAIL FIXED BASE
FIXED COMPONENTS
BUS EXPANSION
BUS EXPANSION KIT
BUS EXPANSION KIT MALE & FEMALE
SCREW TOOLS
FIXED FRAMES
PROTO FRAMES
FRAME PANEL CORE CORE2 TOUGH HOLE
PROTO CASESS
ADAPTOR PORT
BURNING TOOLS
BURNING TOOLS KIT
SCREEN REPLACEMENT
RS485 EXPANSION
WATCH KITS
ACCESSORY KIT CHARGE BATTERY POWER SUPPLY LIPO
ESP32S3 S3 FEMALE HEADER 1.27MM
CAPSULE PROTO HOLE 2.54 PEGBOARD
WATCH PLUS2 STICKC
WATCH CORE CORE2 CORES3 KIT
RIGHT-ANGLE CONNECTORS
PLATE NUTS
ALUM CONNECTOR














































































































/img-385e5d9c-e004-4da4-9a8e-8e1ff7c3cd74.webp)












































































































/img-714d3c91-fc11-4587-8e94-84829d272b65.webp)

































/img-7ab4422b-cf6e-42bf-b5f4-7be94ba4e368.jpg)




























































































/img-dfd21f85-fe1b-4210-a062-5adbe33b3d0c.webp)































/img-2f4d8d58-dfc6-4ee5-80eb-b3149d224580.webp)





































/img-a106da50-2ac2-4e6f-9473-5f63a1082a6e.webp)