Arduino入門
2. デバイス&サンプル
3. M5Unified
4. M5GFX
5. 拡張モジュール&サンプル
Unit
Base
IoT
アクセサリー
Unit HBridge Arduino チュートリアル
1. 準備
- 環境設定: Arduino IDE のはじめにガイド を参考にして、IDE をインストールし、使用する開発ボードに対応するボードマネージャと必要なドライバライブラリをインストールしてください。
- 使用するライブラリ:
- 使用するハードウェア:


2. サンプルプログラム
サンプルの説明
Unit HBridge は、モーターの速度、方向、電圧などを設定することができる DC モータードライバモジュールです。
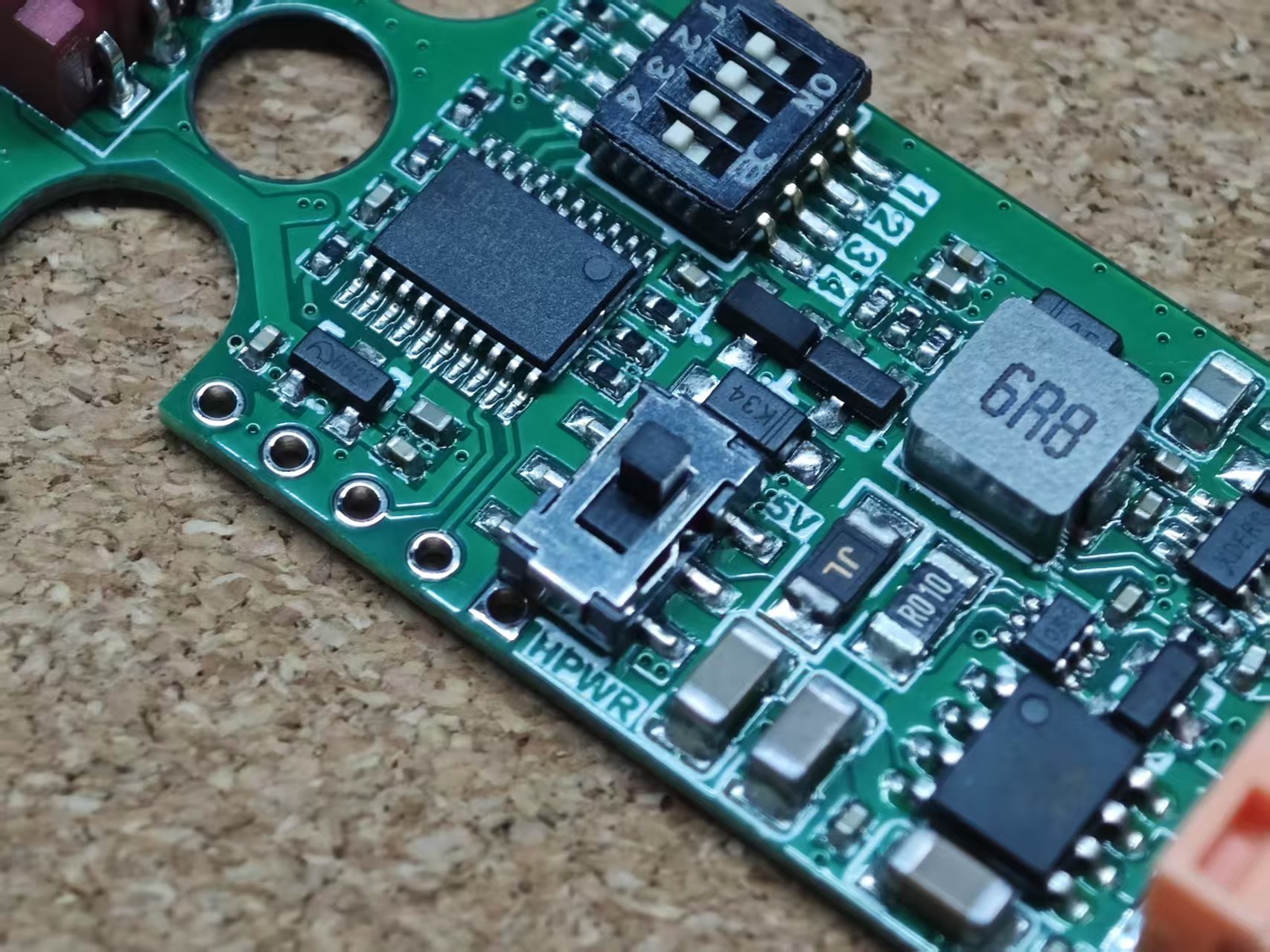
Unit HBridge v1.1 バージョンでは、現在のモーターの電流値を読み取ることもサポートしています。電源スイッチ
モーターの電源選択
Unit HBridge は、DC/DC バックコンバータ回路を内蔵しており、外部から入力された 6 ~ 12V を 5V に変換して、異なるモーターの電源要求に適応できます。また、モーターの電源を外部からの 6 ~ 12V 入力または DC/DC で変換された 5V から選択するためのスイッチも搭載されています。スイッチを HPWR に設定すると外部入力電圧を使用し、5V に設定すると DC/DC 変換後の 5V 電圧を使用します。使用する際は、モーターの仕様に応じて適切な駆動電圧を選択してください。
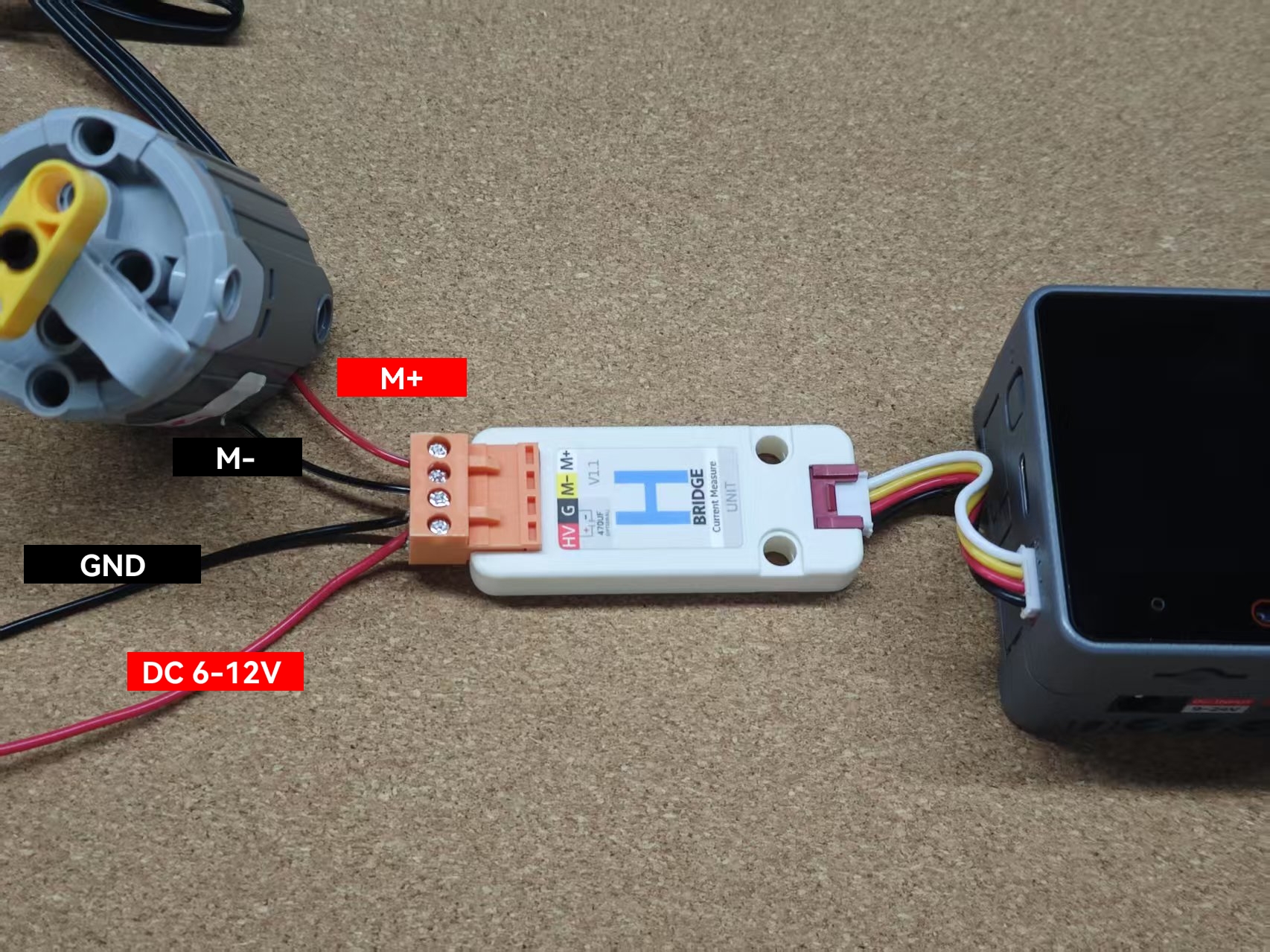
モーター接続
完全なプログラム
cpp
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58
#include "M5Unified.h"
#include "Wire.h"
#include "M5UnitHbridge.h"
M5UnitHbridge driver;
uint8_t fw_version = 0;
bool motor_run = false;
void get_current_voltage()
{
// getMotorCurrent() 関数は Hbridge V1.1 バージョンでのみサポートされています
if (fw_version >= 2) {
Serial.printf("%.2fA\r\n", driver.getMotorCurrent());
}
Serial.printf("%.2fV\r\n", driver.getAnalogInput(_12bit) / 4095.0f * 3.3f / 0.09f);
}
void setup()
{
M5.begin();
Serial.begin(115200);
M5.Display.setTextDatum(middle_center);
M5.Display.setFont(&fonts::lgfxJapanMinchoP_24);
while (!driver.begin(&Wire, HBRIDGE_I2C_ADDR, 2, 1, 100000L)) {
M5.Display.drawString("Unit HBridge init Fail!", M5.Display.width() / 2, M5.Display.height() / 2);
delay(1000);
}
fw_version = driver.getFirmwareVersion();
Serial.printf("Hbridge Firmware Version: %d\r\n", fw_version);
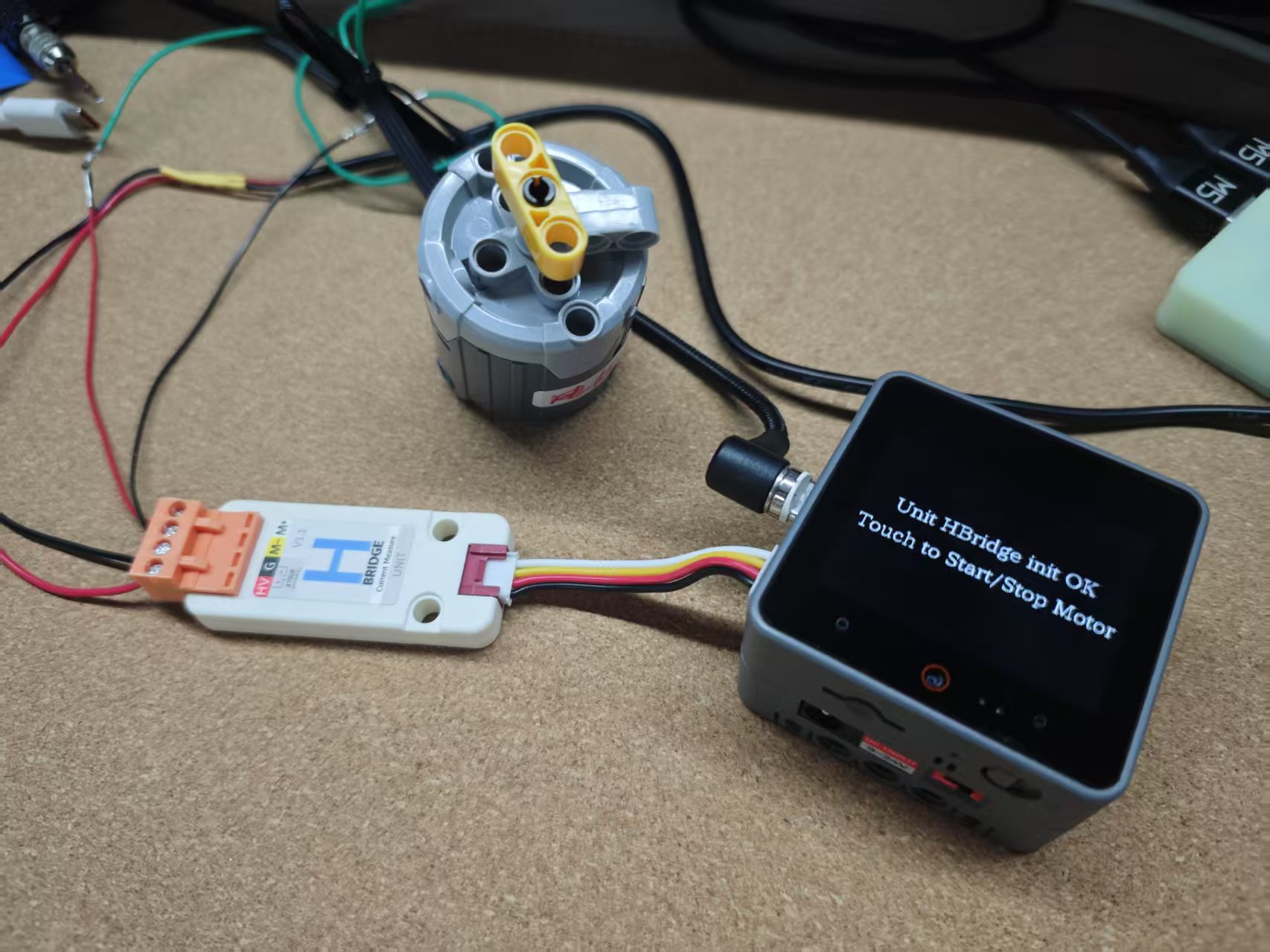
M5.Display.clear();
M5.Display.drawString("Unit HBridge init OK", M5.Display.width() / 2, M5.Display.height() / 2 - 20);
M5.Display.drawString("Touch to Start/Stop Motor", M5.Display.width() / 2, M5.Display.height() / 2 + 20);
}
void loop()
{
M5.update();
auto t = M5.Touch.getDetail();
if (t.wasClicked() || M5.BtnA.wasClicked()) {
motor_run = !motor_run;
M5.Display.clear();
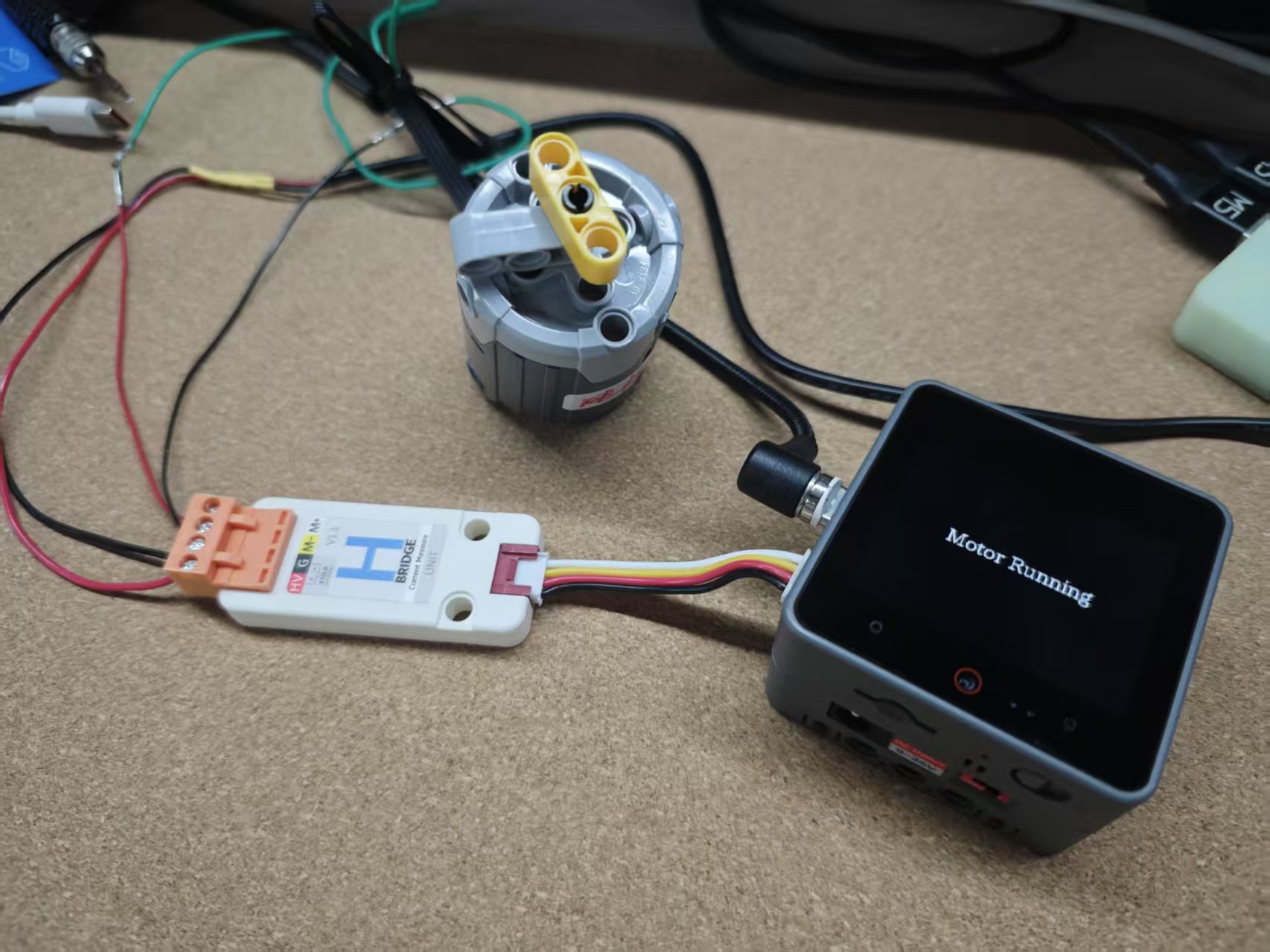
if (motor_run) {
driver.setDriverDirection(HBRIDGE_FORWARD);
// driver.setDriverDirection(HBRIDGE_BACKWARD);
driver.setDriverSpeed8Bits(127);
M5.Display.drawString("Motor Running", M5.Display.width() / 2, M5.Display.height() / 2);
} else {
driver.setDriverDirection(HBRIDGE_STOP);
driver.setDriverSpeed8Bits(127);
M5.Display.drawString("Motor Stop", M5.Display.width() / 2, M5.Display.height() / 2);
}
}
get_current_voltage();
delay(10);
}3. コンパイルとアップロード
- ダウンロードモード:異なるデバイスではプログラム書き込み前にダウンロードモードに入る必要があります。この手順は使用するメインコントロールデバイスによって異なる場合があります。詳細については、Arduino IDE のはじめにガイド を参照し、デバイスごとのダウンロード手順をご確認ください。
CoreS3 の場合、リセットボタンを 2 秒ほど長押しして、内部の緑色の LED が点灯したらボタンを離します。これでデバイスはダウンロードモードに入り、プログラム書き込みの準備が整います。
.gif)
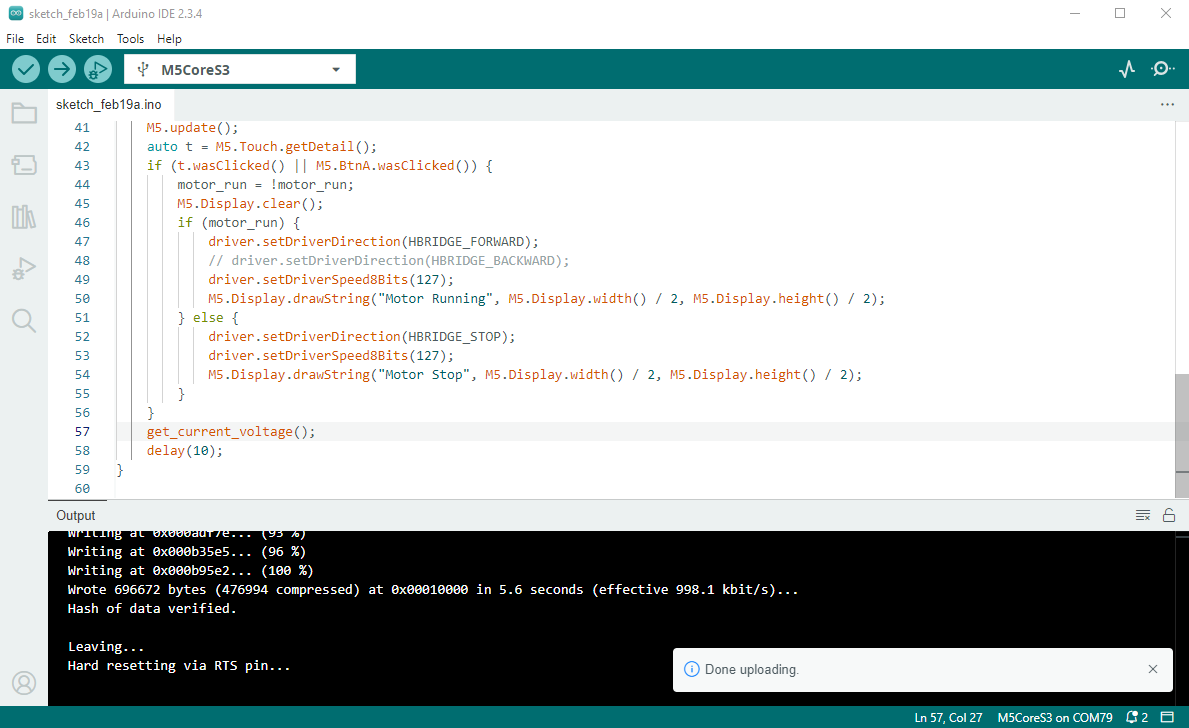
- デバイスのポートを選択し、Arduino IDE の左上にあるコンパイル&アップロードボタンをクリックして、プログラムのコンパイルとアップロードを行います。
4. モーター制御
Unit HBridge を使用して、モーターの回転と停止を制御します。