Arduino 上手教程
2. 设备开发 & 案例程序
3. M5Unified
4. M5GFX
5. 拓展模块
Unit
Atomic
Tab5
IoT
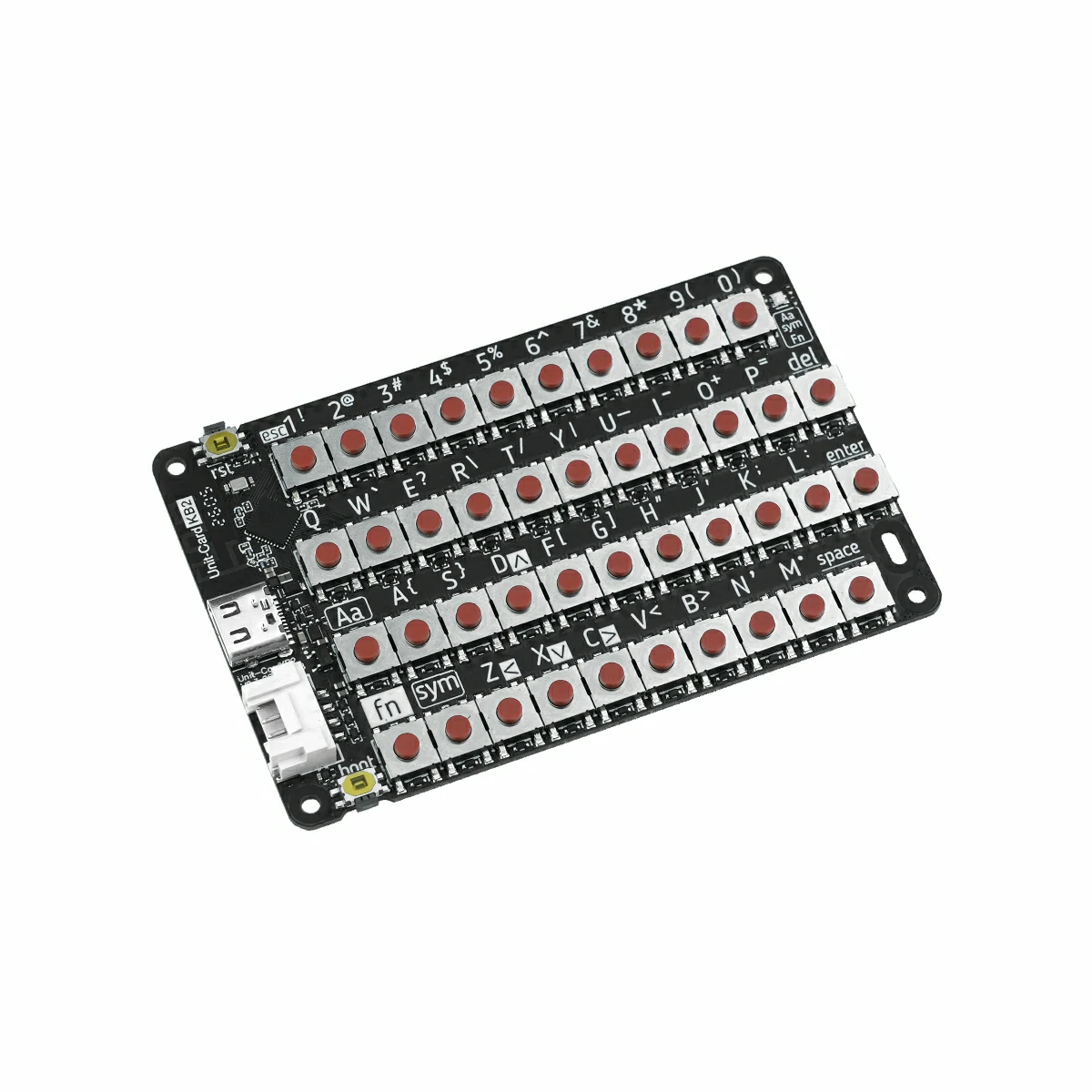
Unit CardKB2 Arduino 使用教程
1.准备工作
1.环境配置:参考Arduino IDE上手教程完成 IDE 安装,并根据实际使用的开发板安装对应的板管理与驱动库。
2.使用到的驱动库:
3.使用到的硬件产品:

2.注意事项
3.案例程序
模式切换
使用前请先给 Unit CardKB2 供电(HY2.0-4P 或 USB Type-C 均可),再通过组合键 Fn + Sym + 数字键 切换通信模式。模式切换后会自动保存,下次上电时保持当前设置。
推荐操作顺序:
- 给 Unit CardKB2 供电。
- 使用快捷键切换到目标模式。
- 在 AtomS3R 上上传并运行对应模式的示例程序。
- 打开串口监视器观察输出结果。
- Fn + Sym + 1:切换至 I2C 模式(出厂默认),白色指示灯闪烁 1 次
- Fn + Sym + 2:切换至 UART 模式,白色指示灯闪烁 2 次
- Fn + Sym + 3:切换至 ESP-NOW 广播模式,白色指示灯闪烁 3 次
- Fn + Sym + 4:切换至 BLE HID 模式,白色指示灯闪烁 4 次
I2C 模式
使用前操作:给 Unit CardKB2 供电后,按 Fn + Sym + 1 切换到 I2C 模式(出厂默认)。
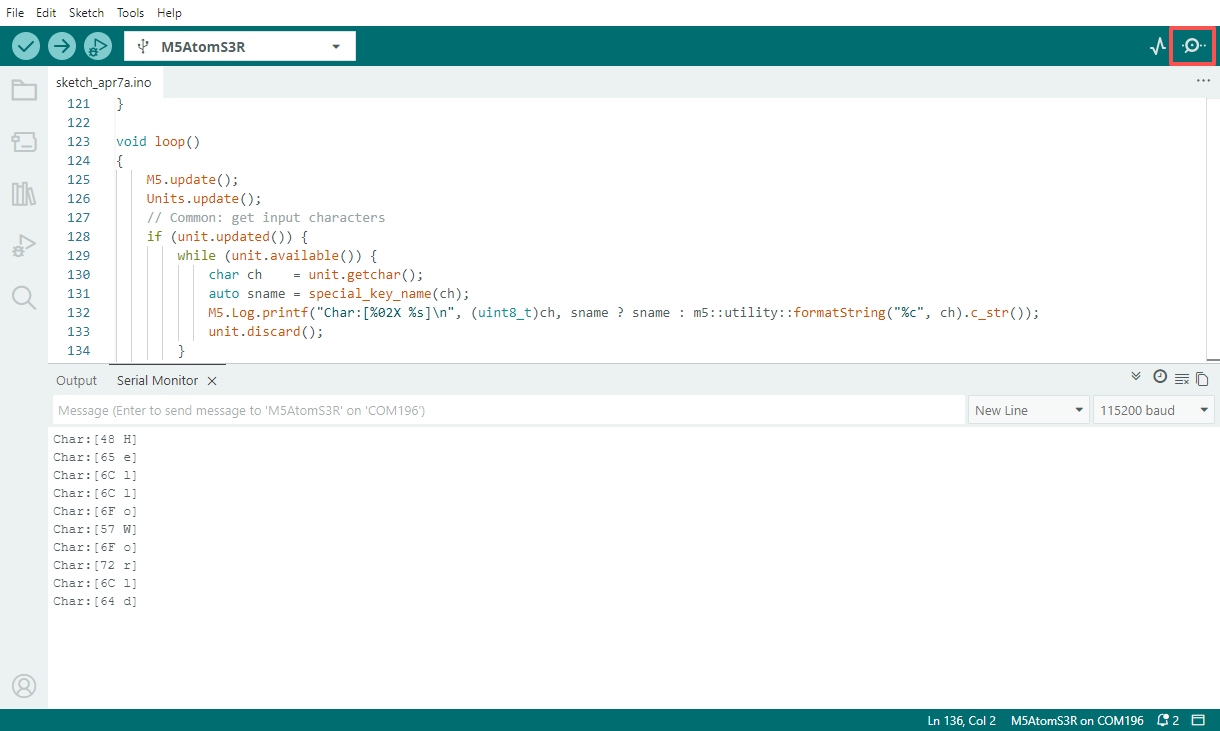
使用该示例可让 AtomS3R 通过 I2C 轮询读取当前键值,并在串口中打印接收到的字符内容。
#include <M5Unified.h>
#include <M5UnitUnified.h>
#include <M5UnitUnifiedKEYBOARD.h>
#include <M5HAL.hpp>
#include <M5Utility.h>
#include <cctype>
#include <string>
#define USING_UNIT_CARDKB2
#define USING_I2C_FOR_CARDKB2
// *************************************************************
namespace {
m5::unit::UnitUnified Units;
const char* special_key_name(const char ch)
{
switch (ch) {
case '\b':
return "BS";
case '\t':
return "TAB";
case '\n':
return "LF";
case '\r':
return "CR";
case 0x1B:
return "ESC";
case 0x7F:
return "DEL";
default:
break;
}
using namespace m5::unit::cardkb2;
switch (ch) {
case SCHAR_LEFT:
return "LEFT";
case SCHAR_UP:
return "UP";
case SCHAR_DOWN:
return "DOWN";
case SCHAR_RIGHT:
return "RIGHT";
default:
break;
}
return nullptr;
}
m5::unit::UnitCardKB2 unit;
// NessoN1: Arduino Wire (I2C_NUM_0) cannot be used for GROVE port.
// Wire is used by M5Unified In_I2C for internal devices (IOExpander etc.).
// Wire1 exists but is reserved for HatPort — cannot be used for GROVE.
// Reconfiguring Wire to GROVE pins breaks In_I2C, causing ESP_ERR_INVALID_STATE in M5.update().
// Solution: Use SoftwareI2C via M5HAL (bit-banging) for the GROVE port.
// NanoC6: Wire.begin() on GROVE pins conflicts with m5::I2C_Class registered by Ex_I2C.setPort()
// on the same I2C_NUM_0, causing sporadic NACK errors.
// Solution: Use M5.Ex_I2C (m5::I2C_Class) directly instead of Arduino Wire.
bool setup_i2c()
{
auto board = M5.getBoard();
if (board == m5::board_t::board_ArduinoNessoN1) {
// NessoN1: GROVE is on port_b (GPIO 5/4), not port_a (which maps to Wire pins 8/10)
auto pin_num_sda = M5.getPin(m5::pin_name_t::port_b_out);
auto pin_num_scl = M5.getPin(m5::pin_name_t::port_b_in);
M5_LOGI("getPin(M5HAL): SDA:%u SCL:%u", pin_num_sda, pin_num_scl);
m5::hal::bus::I2CBusConfig i2c_cfg;
i2c_cfg.pin_sda = m5::hal::gpio::getPin(pin_num_sda);
i2c_cfg.pin_scl = m5::hal::gpio::getPin(pin_num_scl);
auto i2c_bus = m5::hal::bus::i2c::getBus(i2c_cfg);
M5_LOGI("Bus:%d", i2c_bus.has_value());
return Units.add(unit, i2c_bus ? i2c_bus.value() : nullptr) && Units.begin();
} else if (board == m5::board_t::board_M5NanoC6) {
// NanoC6: Use M5.Ex_I2C (m5::I2C_Class, not Arduino Wire)
M5_LOGI("Using M5.Ex_I2C");
return Units.add(unit, M5.Ex_I2C) && Units.begin();
} else {
auto pin_num_sda = M5.getPin(m5::pin_name_t::port_a_sda);
auto pin_num_scl = M5.getPin(m5::pin_name_t::port_a_scl);
M5_LOGI("getPin: SDA:%u SCL:%u", pin_num_sda, pin_num_scl);
Wire.end();
Wire.begin(pin_num_sda, pin_num_scl, 100 * 1000U);
return Units.add(unit, Wire) && Units.begin();
}
}
bool setup_cardkb2_i2c()
{
if (!setup_i2c()) {
return false;
}
M5.Log.printf("Firmware:%02X\n", unit.firmwareVersion());
return true;
}
} // namespace
using namespace m5::unit::keyboard;
void setup()
{
M5.begin();
bool unit_ready{};
unit_ready = setup_cardkb2_i2c();
if (!unit_ready) {
M5_LOGE("Failed to begin");
M5_LOGE("Check CardKB2 communication mode (Fn+Sym+1:I2C)");
while (true) {
m5::utility::delay(10000);
}
}
M5_LOGI("M5UnitUnified has been begun");
M5_LOGI("%s", Units.debugInfo().c_str());
}
void loop()
{
M5.update();
Units.update();
// Common: get input characters
if (unit.updated()) {
while (unit.available()) {
char ch = unit.getchar();
auto sname = special_key_name(ch);
M5.Log.printf("Char:[%02X %s]\n", (uint8_t)ch, sname ? sname : m5::utility::formatString("%c", ch).c_str());
unit.discard();
}
}
}UART 模式
使用前操作:给 Unit CardKB2 供电后,按 Fn + Sym + 2 切换到 UART 模式。
使用该示例可让 AtomS3R 通过串口接收 Unit CardKB2 发出的按键帧,并将键值、按键状态以及对应字符输出到串口监视器。
#include <M5Unified.h>
#include <M5UnitUnified.h>
#include <M5UnitUnifiedKEYBOARD.h>
#include <M5HAL.hpp>
#include <M5Utility.h>
#include <cctype>
#include <string>
#define USING_UNIT_CARDKB2
#define USING_UART_FOR_CARDKB2
// *************************************************************
namespace {
m5::unit::UnitUnified Units;
const char* special_key_name(const char ch)
{
switch (ch) {
case '\b':
return "BS";
case '\t':
return "TAB";
case '\n':
return "LF";
case '\r':
return "CR";
case 0x1B:
return "ESC";
case 0x7F:
return "DEL";
default:
break;
}
using namespace m5::unit::cardkb2;
switch (ch) {
case SCHAR_LEFT:
return "LEFT";
case SCHAR_UP:
return "UP";
case SCHAR_DOWN:
return "DOWN";
case SCHAR_RIGHT:
return "RIGHT";
default:
break;
}
return nullptr;
}
// #pragma message "Using UnitCardKB2UART (UART)"
m5::unit::UnitCardKB2UART unit;
bool setup_cardkb2_uart()
{
// UART mode: CardKB2 must be switched to UART mode first (Fn+Sym+2 on the device)
// Port C primary, Port A fallback (NessoN1: Port B fallback — Port A is Wire pins)
auto board = M5.getBoard();
auto pin_num_rx = M5.getPin(m5::pin_name_t::port_c_rxd);
auto pin_num_tx = M5.getPin(m5::pin_name_t::port_c_txd);
if (pin_num_rx < 0 || pin_num_tx < 0) {
if (board == m5::board_t::board_ArduinoNessoN1) {
M5_LOGW("PortC is not available, using PortB");
pin_num_rx = M5.getPin(m5::pin_name_t::port_b_in);
pin_num_tx = M5.getPin(m5::pin_name_t::port_b_out);
} else {
M5_LOGW("PortC is not available, using PortA");
Wire.end();
pin_num_rx = M5.getPin(m5::pin_name_t::port_a_pin1);
pin_num_tx = M5.getPin(m5::pin_name_t::port_a_pin2);
}
}
M5_LOGI("getPin: RX:%d TX:%d", pin_num_rx, pin_num_tx);
#if defined(CONFIG_IDF_TARGET_ESP32C6)
auto& serial = Serial1;
#elif SOC_UART_NUM > 2
auto& serial = Serial2;
#elif SOC_UART_NUM > 1
auto& serial = Serial1;
#else
#error "Not enough Serial"
#endif
serial.begin(115200, SERIAL_8N1, pin_num_rx, pin_num_tx);
if (!Units.add(unit, serial) || !Units.begin()) {
return false;
}
M5.Log.printf("Firmware:Unknown (UART mode)\n");
return true;
}
} // namespace
using namespace m5::unit::keyboard;
void setup()
{
M5.begin();
bool unit_ready{};
unit_ready = setup_cardkb2_uart();
M5_LOGI("M5UnitUnified has been begun");
M5_LOGI("%s", Units.debugInfo().c_str());
}
void loop()
{
M5.update();
Units.update();
// Common: get input characters
if (unit.updated()) {
while (unit.available()) {
char ch = unit.getchar();
auto sname = special_key_name(ch);
M5.Log.printf("Char:[%02X %s]\n", (uint8_t)ch, sname ? sname : m5::utility::formatString("%c", ch).c_str());
unit.discard();
}
}
}ESP-NOW 模式
使用前操作:给 Unit CardKB2 供电后,按 Fn + Sym + 3 切换到 ESP-NOW 广播模式。
使用该示例可让 AtomS3R 接收来自 Unit CardKB2 的 ESP-NOW 广播按键数据,并对数据帧头、长度与校验和进行校验,最终在串口中输出按键按下与释放状态。
#include <esp_now.h>
#include <WiFi.h>
volatile bool packetReady = false;
uint8_t packet[5];
int packetLen = 0;
void OnDataRecv(const uint8_t *mac, const uint8_t *incomingData, int len)
{
if (len > 5) len = 5;
memcpy(packet, incomingData, len);
packetLen = len;
packetReady = true;
}
void setup()
{
Serial.begin(115200);
WiFi.mode(WIFI_STA);
if (esp_now_init() != ESP_OK) {
Serial.println("Error initializing ESP-NOW");
return;
}
esp_now_register_recv_cb(esp_now_recv_cb_t(OnDataRecv));
}
void loop()
{
if (!packetReady) return;
packetReady = false;
Serial.print("Raw: ");
for (int i = 0; i < packetLen; i++) {
Serial.printf("%02X ", packet[i]);
}
if (packetLen != 5) {
return;
}
uint8_t head = packet[0];
uint8_t dataLen = packet[1];
uint8_t keyId = packet[2];
uint8_t keyState = packet[3];
uint8_t recvSum = packet[4];
if (head != 0xAA) {
Serial.println("Error: invalid frame head");
return;
}
if (dataLen != 0x03) {
Serial.println("Error: invalid DATA_LEN");
return;
}
uint8_t calcSum = (dataLen + keyId + keyState) & 0xFF;
if (calcSum != recvSum) {
Serial.printf("Error: checksum mismatch recv=%02X calc=%02X\n", recvSum, calcSum);
return;
}
Serial.println();
if (keyState == 0x01) {
Serial.printf("Key %d pressed\n", keyId);
} else if (keyState == 0x02) {
Serial.printf("Key %d released\n", keyId);
} else {
Serial.printf("Error: unknown key state %02X\n", keyState);
}
}BLE HID 模式
使用前操作:给 Unit CardKB2 供电后,按 Fn + Sym + 4 切换到 BLE HID 模式。
BLE HID 属于标准蓝牙输入设备协议,不仅可与本教程中的接收端示例配合使用,也可直接连接手机、平板或 PC(需支持 BLE HID)作为键盘输入设备。
使用该示例可让 AtomS3R 作为 BLE HID 接收端,扫描并连接 Unit CardKB2,随后在串口中输出键盘上报的原始 HID 数据与解析后的 ASCII 字符。
#include <NimBLEDevice.h>
static NimBLEUUID kHidSvcUUID((uint16_t)0x1812);
static NimBLEUUID kReportUUID((uint16_t)0x2A4D);
static NimBLEAddress g_addr;
static NimBLEClient* g_client = nullptr;
static bool g_hasTarget = false, g_connected = false,
g_authReady = false, g_subscribed = false;
// HID keycode → ASCII 查找表
static const char kNormal[] = "\0\0\0\0abcdefghijklmnopqrstuvwxyz1234567890\n\x1b\b\t -=[]\\"
"\0;'`,./";
static const char kShifted[] = "\0\0\0\0ABCDEFGHIJKLMNOPQRSTUVWXYZ!@#$%^&*()\n\x1b\b\t _+{}|"
"\0:\"~<>?";
static uint8_t hidToAscii(const uint8_t* r, size_t len) {
if (len == 9 && r[0] == 0x01) { r++; len = 8; }
if (len < 3) return 0;
uint8_t kc = r[2];
if (kc == 0 || kc >= sizeof(kNormal)) return 0;
return (r[0] & 0x22) ? (uint8_t)kShifted[kc] : (uint8_t)kNormal[kc];
}
static void reportCB(NimBLERemoteCharacteristic*, uint8_t* data, size_t len, bool) {
Serial.printf("+BLE:RX,%u", (unsigned)len);
for (size_t i = 0; i < len; i++) Serial.printf(",%02X", data[i]);
Serial.println();
uint8_t ch = hidToAscii(data, len);
if (ch) Serial.printf("+BLE:ASCII,0x%02X,'%c'\n", ch, (ch >= 0x20 && ch < 0x7F) ? ch : '?');
}
struct ClientCB : NimBLEClientCallbacks {
void onConnect(NimBLEClient* c) override {
Serial.println("[BLE] Connected");
g_connected = true; g_authReady = g_subscribed = false;
int rc; NimBLEDevice::startSecurity(c->getConnHandle(), &rc);
}
void onDisconnect(NimBLEClient*, int reason) override {
Serial.printf("[BLE] Disconnected (%d)\n", reason);
g_connected = g_authReady = g_subscribed = false;
}
void onAuthenticationComplete(NimBLEConnInfo& info) override {
g_authReady = info.isAuthenticated() || info.isEncrypted();
Serial.printf("[BLE] Auth: %s\n", g_authReady ? "OK" : "FAIL");
if (!g_authReady && g_client) g_client->disconnect();
}
bool onConnParamsUpdateRequest(NimBLEClient*, const ble_gap_upd_params*) override { return true; }
};
struct AdvCB : NimBLEScanCallbacks {
void onResult(const NimBLEAdvertisedDevice* d) override {
if (!d->isAdvertisingService(kHidSvcUUID) || g_hasTarget) return;
Serial.printf("[BLE] Found: %s\n", d->getAddress().toString().c_str());
g_addr = d->getAddress(); g_hasTarget = true;
NimBLEDevice::getScan()->stop();
}
};
static void startScan() {
auto* s = NimBLEDevice::getScan();
s->setScanCallbacks(new AdvCB(), false);
s->setActiveScan(false); s->setInterval(100); s->setWindow(20); s->setDuplicateFilter(true);
g_hasTarget = false;
Serial.println("[BLE] Scanning...");
s->start(5, false);
}
static bool subscribeReport() {
auto* svc = g_client ? g_client->getService(kHidSvcUUID) : nullptr;
auto* chr = svc ? svc->getCharacteristic(kReportUUID) : nullptr;
if (!chr || (!chr->canNotify() && !chr->canIndicate())) return false;
if (!chr->subscribe(true, reportCB, true)) return false;
g_subscribed = true;
Serial.println("[BLE] Subscribed");
return true;
}
void setup() {
Serial.begin(115200); delay(300);
NimBLEDevice::init("ESP32S3_BLE_Receiver");
NimBLEDevice::setPower(ESP_PWR_LVL_P9);
NimBLEDevice::setSecurityAuth(true, false, false);
NimBLEDevice::setSecurityIOCap(BLE_HS_IO_NO_INPUT_OUTPUT);
NimBLEDevice::setSecurityInitKey(BLE_SM_PAIR_KEY_DIST_ENC | BLE_SM_PAIR_KEY_DIST_ID);
NimBLEDevice::setSecurityRespKey(BLE_SM_PAIR_KEY_DIST_ENC | BLE_SM_PAIR_KEY_DIST_ID);
startScan();
}
void loop() {
if (!g_connected) {
if (!g_hasTarget) { startScan(); delay(1000); return; }
if (!g_client) { g_client = NimBLEDevice::createClient(); g_client->setClientCallbacks(new ClientCB(), true); }
if (!g_client->connect(g_addr, false)) { delay(1500); startScan(); return; }
}
if (g_connected && g_authReady && !g_subscribed) subscribeReport();
delay(50);
}4.编译上传
1.下载模式:不同设备进行程序烧录前需要进入下载模式,不同的主控设备该步骤可能有所不同。详情可参考Arduino IDE上手教程页面底部的设备程序下载教程列表,查看具体的操作方式。
AtomS3R 长按复位按键(大约 2 秒)直到内部绿色 LED 灯亮起,便可松开,此时设备已进入下载模式,等待烧录。
- 2.选中设备端口,点击 Arduino IDE 左上角编译上传按钮,等待程序完成编译并上传至设备。
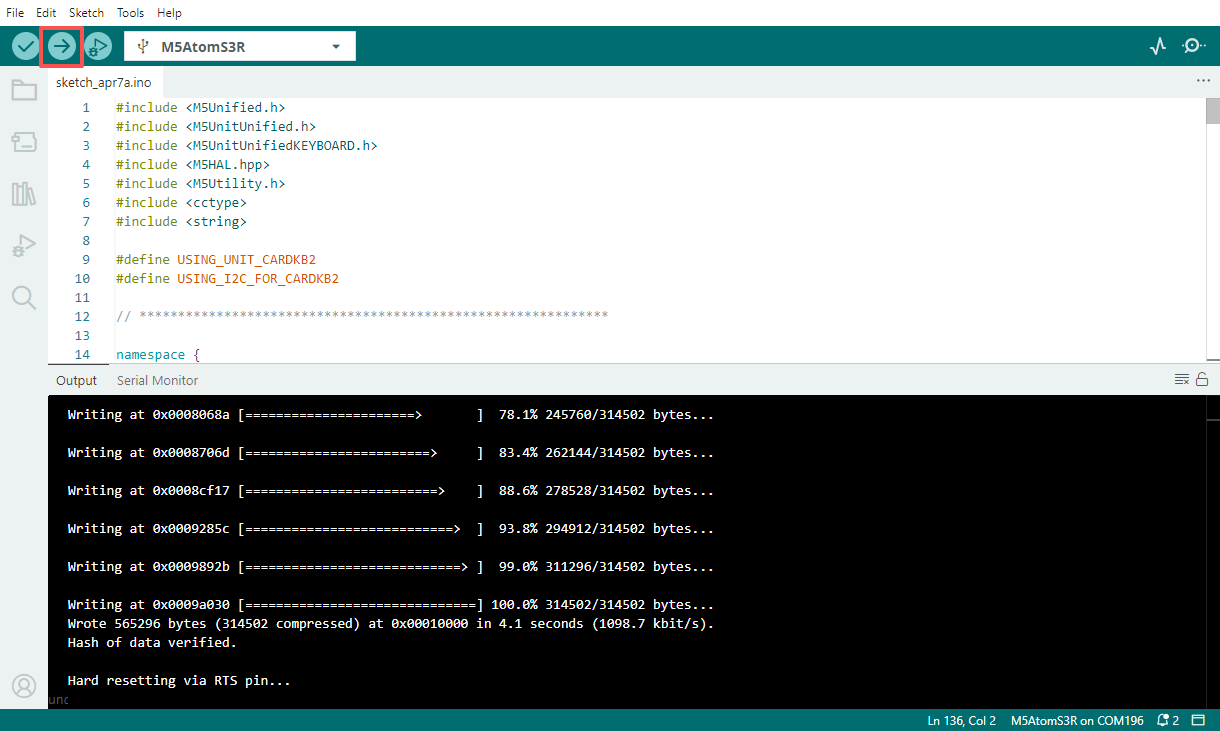
- 3.打开串口监视器,单击键盘按键,查看日志输出。